Scatterer Characterisation Using Polarimetric SAR Tomography
Scatterer Characterisation Using Polarimetric SAR Tomography
Scatterer Characterisation Using Polarimetric SAR Tomography

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Scatterer</strong> <strong>Characterisation</strong> <strong>Using</strong><br />
<strong>Polarimetric</strong> <strong>SAR</strong> <strong>Tomography</strong><br />
Stéphane Guillaso and Andreas Reigber<br />
Berlin University of Technology, Computer Vision and Remote Sensing<br />
Sekr. FR3-1, Franklinstr. 28/29, D-10587 Berlin, Germany<br />
Email: stephane@cs.tu-berlin.de, anderl@cs.tu-berlin.de<br />
Abstract— This paper presents the first step to characterise<br />
scatterers using polarimetric <strong>SAR</strong> tomography (POLTOM<strong>SAR</strong>).<br />
It is a logical extension of the tomographic data processing, which<br />
consists to use the vectorial properties of electromagnetic waves.<br />
An introduction to the estimation of the polarisation state of<br />
retrieved target is proposed. It is based on a modified signal<br />
model adapted to the MUSIC algorithm. This makes it possible<br />
to determinate the physical nature of detected object, which is not<br />
possible using classical approach, unless having the ground-truth<br />
of the scene under study. The experimental results are shown<br />
using a multibaseline data set acquired in L-band by DLR’s<br />
experimental <strong>SAR</strong> (E-<strong>SAR</strong>) on a test site near Oberpfaffenhofen<br />
/ Germany.<br />
I. INTRODUCTION<br />
<strong>SAR</strong> tomography is the extension of conventional twodimensional<br />
<strong>SAR</strong> imaging principle to three dimensions. A<br />
real three-dimensional imaging of a scene is achieved by<br />
the formation of an additional synthetic aperture in elevation,<br />
using a coherent combination of images acquired from several<br />
parallel flight tracks. The introduction of tomographic <strong>SAR</strong><br />
offers the possibility of a direct localisation of all scattering<br />
contributions in a volume [1], [2]. This greatly extends the<br />
potential of <strong>SAR</strong>, particularly for the analysis of volume<br />
structures, like for example forests or urban areas [3], [4].<br />
Up to now, different investigation of high-resolution approaches,<br />
like Capon [2], MUSIC [3], were proposed in<br />
order to improve the resolution achieved using the standard<br />
beamforming Fourier-based method [1]. These methods are<br />
often employed for so-called DoA (Direction-of-Arrical) of<br />
received waves using an antenna array. Basically, a multibaseline<br />
acquisition sustem represents an antenna array and<br />
these methods can be applied in order to determine the height<br />
of dominant scatterers. there are presented in section II. All<br />
these approaches make it possible to retrieve the position<br />
of scatterers over volumetric areas, but give any information<br />
about the nature of the scatterer itself unless having the<br />
ground-truth of the scene under study.<br />
A first approach to characterise the nature of retrieved target<br />
is presented in section III. It is based on a modified signal<br />
model adapted to MUSIC algorithm. This approach is applied<br />
to partial polarimetric data [3]. On the one hand, the MUSIC<br />
approach is able to give a higher precision about the scatterer<br />
height than using only single channel <strong>SAR</strong> data. On the<br />
other hand, polarimetric MUSIC approach makes it possible to<br />
0-7803-9051-2/05/$20.00 (C) 2005 IEEE<br />
retrieve a partial polarimetric characterisation of the scatterer<br />
observed.<br />
The efficiency of this polarimetric <strong>SAR</strong> tomography analysis<br />
is demonstrated using 14 fully polarimetric <strong>SAR</strong> images,<br />
obtained from DLR-E<strong>SAR</strong> airborne sensor in L-band repeatpass<br />
mode.<br />
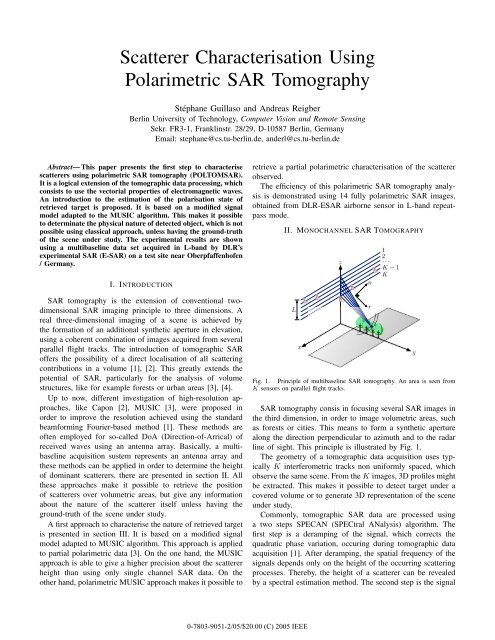
II. MONOCHANNEL <strong>SAR</strong> TOMOGRAPHY<br />
L<br />
x<br />
z<br />
n<br />
r<br />
1<br />
2 ···<br />
K − 1<br />
K<br />
Fig. 1. Principle of multibaseline <strong>SAR</strong> tomography. An area is seen from<br />
K sensors on parallel flight tracks.<br />
<strong>SAR</strong> tomography consis in focusing several <strong>SAR</strong> images in<br />
the third dimension, in order to image volumetric areas, such<br />
as forests or cities. This means to form a synthetic aperture<br />
along the direction perpendicular to azimuth and to the radar<br />
line of sight. This principle is illustrated by Fig. 1.<br />
The geometry of a tomographic data acquisition uses typically<br />
K interferometric tracks non uniformly spaced, which<br />
observe the same scene. From the K images, 3D profiles might<br />
be extracted. This makes it possible to detect target under a<br />
covered volume or to generate 3D representation of the scene<br />
under study.<br />
Commonly, tomographic <strong>SAR</strong> data are processed using<br />
a two steps SPECAN (SPECtral ANalysis) algorithm. The<br />
first step is a deramping of the signal, which corrects the<br />
quadratic phase variation, occuring during tomographic data<br />
acquisition [1]. After deramping, the spatial frequency of the<br />
signals depends only on the height of the occurring scattering<br />
processes. Thereby, the height of a scatterer can be revealed<br />
by a spectral estimation method. The second step is the signal<br />
y
focussing, which is performed using standard high resolution<br />
methods such as Fourier, Capon, and MUSIC [5].<br />
A tomographic data acquisition system is constitued by K<br />
sensors, or interferometric paths. The signals xk received by<br />
each sensor k provided by D scatterers localised at height<br />
{zd} D d=1 are arranged in the K × 1 vector �x:<br />
�x =[A]�s + �n (1)<br />
where �s represents the backscattered power of the D scatterers<br />
and �n denotes a vector formed by scalar nk representing a<br />
circular Gaussian white noise. The [A] matrix, with dimension<br />
K × D, contains the phase response due to the sensor<br />
geometry only. This matrix is made up various vectors �a(zd)<br />
representing the steering vector, which corresponds to the d-th<br />
scatterer:<br />
�a(zd) =[e iφ1(zd) iφK(zd) T<br />
···e ] (2)<br />
where φk(zd) = − 4π<br />
λ<br />
each term is define by Fig. 2.<br />
zs<br />
H0<br />
√ (H0−zd+zs) 2 +(ygr+ys+ z d<br />
tan θ )2, where<br />
ys<br />
θ<br />
Ck<br />
ygr<br />
z<br />
tan θ<br />
θ z<br />
Fig. 2. Geometric parameters used during tomographic data processing.<br />
All high resolution methods are based on a covariance<br />
matrix formulation defined as:<br />
[R] =〈�x�x † 〉 which is estimated by [ ˆ N�<br />
R]=<br />
(3)<br />
n=1<br />
�xn�x † n<br />
where N > K represents the number of sample used,<br />
necessary to obtain a non-singular matrix [ ˆ R].<br />
To focus tomographic <strong>SAR</strong> data, two approaches based on<br />
high resolution methods are existing: classical- and subspacebased.<br />
Classical methods are the famous Fourier- and Caponbased<br />
approaches. The main idea is to focus the system on<br />
a certain height, corresponding to the height of a scatterer.<br />
To do that, the range of valid heights is scanned in order<br />
to find the maximum of power. The estimated powers given<br />
by Fourier- and Capon-based, ˆ PF (z) and ˆ PC(z) respectively,<br />
beamforming approaches are function of the height z:<br />
ˆPF (z) = �a(z)† [ ˆ R]�a(z)<br />
K2 and ˆ 1<br />
PC(z) =<br />
�a(z) † [ ˆ R] −1 (4)<br />
�a(z)<br />
where �a(z) represents the steering vector given by Eq. 2.<br />
The second category is based on the principle of subspace<br />
estimation. It gives an estimation of the scatterer height with<br />
an infinite resolution, independently of the signal-to-noise<br />
ratio (SNR). The must known subspace methods are MUSIC,<br />
ESPRIT, WSF [5]. In the case of tomographic <strong>SAR</strong> data<br />
processing, the MUSIC method has been used. The pseudobeamforming<br />
of MUSIC, ˆ PM(z), is given by:<br />
ˆPM(z) =<br />
1<br />
�a † ([ ÊN ][ ÊN ] † )�a<br />
where [ ÊN ] represents the noise subspace obtained after an<br />
eigendecomposition of the observed covariance matrix, [ ˆ R]=<br />
[ Ê][ˆ Λ][ Ê]† [5]. The term pseudo-beamforming is employed<br />
here because the position of the retrieved power is using only<br />
to localise the target height.<br />
The different methods presented above have been applied<br />
to a L-band data set of the E-<strong>SAR</strong>. The data were acquired<br />
in May 1998 on the test site of Oberpfaffenhofen/Germany.<br />
During the campaign fully polarimetric data sets were recorded<br />
from K =14 parallel flight tracks with a respective distance<br />
of approximatively 20 meters. The airplane used by the E-<br />
<strong>SAR</strong> is equipped with a high-precision positioning system,<br />
which allows an absolute estimation of the antenna tracks<br />
with an accuracy of few centimetres. With this data the errors<br />
arising from the aircraft movements are compensated by a new<br />
approach of motion compensation during <strong>SAR</strong> processing [6].<br />
Additionally, a very precise velocity and range delay variation<br />
compensation have been carried out. To minimise small errors<br />
in the absolute positioning of the aircraft, also a calibration<br />
of the image phases, based on the response of a single corner<br />
reflectors is performed.<br />
height (m)<br />
height (m)<br />
660<br />
650<br />
640<br />
630<br />
Fourier - HH<br />
street<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
azimuth position (pixels)<br />
MUSIC (1) - HH<br />
660<br />
street<br />
650<br />
640<br />
630<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
azimuth position (pixels)<br />
height (m)<br />
height (m)<br />
660<br />
650<br />
640<br />
630<br />
CAPON - HH<br />
street<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
(5)<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
azimuth position (pixels)<br />
MUSIC (5) - HH<br />
660<br />
street<br />
650<br />
640<br />
630<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
azimuth position (pixels)<br />
Fig. 3. Fourier-, Capon-, MUSIC 1-, MUSIC 5-based height/azimuth slice<br />
tomograms.<br />
Fig. 3 represent height/azimuth slices of tomograms obtained<br />
using Fourier, Capon, and MUSIC approaches, respectively.<br />
The left part of the scene is constituted by a dense<br />
spruce forest with a height of 15 to 20 meters [1]. Then, the<br />
azimuth slice crosses a street, some bushes and a building.<br />
The right part of the scene consists of nearly flat grass land<br />
with a corner reflector.<br />
The Capon-based approach makes it possible to reduce the<br />
sidelobes, particularly strong in case of the building and the<br />
corner reflector. The ground under the forest is better visible<br />
with Capon-based approach. Indeed, the reflectivity of the
grass land is less visible than the ground under the forest. This<br />
indicates that the scattering mechanisms detected under the<br />
forest canopy and the grass land are different. Like the grass<br />
land possesses a surface reflection, the scattering mechanism<br />
under the forest canopy corresponds essentially to a doublebounce<br />
ground-trunk, which gives the ground location. The<br />
same holds for the canopy density. It is also possible to<br />
determinate a height of about 20 meters for the trees.<br />
In the MUSIC-based approach, on the one hand, only one<br />
scatterer was assumed, on the other hand, 5 scatterers where<br />
considered in the processing. The shape of the building is<br />
better visualised, as well as the ground of the grass field, when<br />
only one scatterer is assumed. It is also possible to estimate<br />
the height of the corner reflector. Over the forest, ground and<br />
canopy reflection can be expected. These results are better<br />
when using 5 scatterers, but make no sense for the building<br />
and specially for the grass area.<br />
The result interpretation is possible thanks to a precise<br />
knowledge of the ground-truth of the area under study. Otherwise,<br />
the used high resolution methods give any information<br />
about the physical nature of the detected object. In order to be<br />
able to characterise the nature of the detected objects, it is necessary<br />
to use polarimetric <strong>SAR</strong> data. Indeed <strong>SAR</strong> polarimetry<br />
studies the behaviour of the electromagnetic scattering from<br />
the observed scene. This provides physical information on<br />
scatterers in terms of separation and identification of scattering<br />
mechanisms inside a resolution cell [7].<br />
III. POLARIMETRIC <strong>SAR</strong> TOMOGRAPHY<br />
To visualise the importance of the polarisation in the <strong>SAR</strong><br />
tomography field, the Capon-based approach has been applied<br />
to <strong>SAR</strong> data with different polarisation. The Capon-based<br />
approach is selected because it is sensitive to the power of<br />
the detected backscatterer and reduce the sidelobes.<br />
height (m)<br />
660<br />
650<br />
640<br />
630<br />
CAPON - HH<br />
street<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
height (m)<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
azimuth position (pixels)<br />
azimuth position (pixels)<br />
CAPON - HV<br />
660<br />
street<br />
650<br />
640<br />
630<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
height (m)<br />
660<br />
650<br />
640<br />
630<br />
620<br />
0<br />
surface<br />
100 200 300 400 500<br />
azimuth position (pixels)<br />
CAPON - VV<br />
street<br />
forest<br />
building corner<br />
reflector<br />
surface<br />
Fig. 4. Capon-based height/azimuth slice tomograms using <strong>SAR</strong> data with<br />
different polarisation.<br />
Fig. 4 shows the results obtained using the Capon-based<br />
approach with different polarisation data. They are different<br />
according to the selected polarisation. Over the forest, it can<br />
be observed that the ground is less visible using a vertical<br />
polarisation (VV) and disappear in the cross-polarisation data<br />
(HV). On the contrary, the canopy density becomes more<br />
explicit by using HV data. The corner reflector misses in the<br />
HV data, which is one of the principal characteristic of the<br />
HV data. on the other hand, the reflection over the building is<br />
the strongest with VV data.<br />
This first result interpretation using data with diverse polarisations<br />
shows that the nature of the observed scattering<br />
mechanisms can be estimated. But, like previously, this interpretation<br />
is valid only if the ground-truth is known. Like the<br />
Capon-based obtained data are not coherent, it is not possible<br />
to apply simple polarimetric decomposition, like Pauli-based<br />
decomposition, which can inform about the physical nature of<br />
the detected scatterer. Thereby, the tomographic <strong>SAR</strong> approach<br />
is extended to the use of the vectorial properties of electromagnetic<br />
waves as a logical extension to the tomographic DATA<br />
processing.<br />
An extension of the MUSIC algorithm [8] allows to retrieve<br />
the polarisation information associate to dominant scatterers<br />
[3]. This approach is based on the use of Jones-vector formulation.<br />
The polarisation state of an electromagnetic wave<br />
is defined by its Jones-vector, � E, which contains complete<br />
information about amplitudes and phases of electromagnetic<br />
field components. The Jones-vector can be written using two<br />
polarisation angles: γ and δ, and the polarisation ratio ρ � E :<br />
�E def<br />
= E<br />
� cos γ<br />
sin γe iδ<br />
� �<br />
1<br />
= E cos γ<br />
with ρ � E = tan γe iδ .<br />
<strong>Using</strong> a similar form than Eq. 2, let �y, �s, and �n denote the<br />
received signal, the source amplitude, and the noise vectors.<br />
Then, �y has the following form:<br />
ρ � E<br />
�<br />
(6)<br />
�y =[A]�s + �n (7)<br />
where the 2K × D matrix [A] is the steering matrix with<br />
columns �ad as the steering vectors:<br />
�ad =[ � E T d e iφA(zd)<br />
··· � E T d e iφK(zd) ] T<br />
where { � Ed = [cos γd sin γdeiδd T D ] } d=1 and φk(zd) is given<br />
by Eq. 2.<br />
In [8], a polarisation estimation method using the noise<br />
subspace eigenvectors of [ ˆ R] is described. It can be shown<br />
that each steering vector �ad may be written as the linear<br />
combination of two direction vectors �b1(zd) and �b2(zd), which<br />
are associated to the scattering height zd and two arbitrary<br />
orthogonal polarisations. The steering vector �ad can be written<br />
as:<br />
�ad =[Bd] � fd<br />
(9)<br />
where {[Bd] =[ � b1(zd) � b2(zd)]} D d=1 and � fd represents a 2×1<br />
vector consisting of the linear combination coefficients.<br />
For the sake of simplicity, { � b1(zd)} D d=1 and {� b2(zd)} D d=1<br />
are normalised:<br />
� b ′ 1(zd) = � b1(zd)<br />
� � b1(zd)� and � b ′ 2(zd) = � b2(zd)<br />
� � b2(zd)�<br />
(8)<br />
(10)
Let define �a ′ d = �ad/��ad� = [B ′ d ] � f ′ d as the normalised<br />
steering vector of �ad with {[B ′ d ]=[�b ′ 1(zd) �b ′ 2(zd)]} D d=1 .It<br />
can be shown that the ratio between the two elements of � f ′ d<br />
corresponds to the polarisation ratio ρEd � . The estimation of<br />
�f ′ d is given by calculating the eigenvector of the Hermitian<br />
matrix [B ′ d ]† [EN ][EN ] † [B ′ d ], corresponding the the smallest<br />
eigenvalue.<br />
Finally, the two polarimetric angles {γd} D d=1 and {δd} D d=1<br />
can be determined uniquely from:<br />
γd = tan −1<br />
� �<br />
�<br />
� 1<br />
�<br />
�<br />
� �<br />
�ρEd<br />
� � with δd = − arg ρEd � (11)<br />
From the spheric angle, it is possible to estimate the<br />
orientation φ and the ellipticity τ angles characterising the<br />
polarisation ellipse. The relations between all different angles<br />
are:<br />
tan 2φ = tan 2γ cos δ<br />
sin 2τ = sin2γsin δ (12)<br />
height (m)<br />
height (m)<br />
655<br />
645<br />
635<br />
625<br />
655<br />
645<br />
635<br />
625<br />
forest<br />
MUSIC (5) - PHI<br />
street<br />
building<br />
corner<br />
reflector<br />
ground<br />
0 100 200 300 400 500<br />
azimuth position (pixels)<br />
MUSIC (5) - TAU<br />
forest<br />
street<br />
building<br />
corner<br />
reflector<br />
ground<br />
0 100 200 300 400 500<br />
azimuth position (pixels)<br />
+15 ◦<br />
angles (deg) −15◦<br />
+15 ◦<br />
angles (deg) −15◦<br />
Fig. 5. Angles characterising the polarisation ellipse. Top Orientation angle<br />
φ. Bottom Ellipticity angle τ<br />
Fig. 5 presents results of this polarimetric approach of<br />
the <strong>SAR</strong> tomography, using HH and VH polarisation data.<br />
It represents the orientation φ and the ellipticity τ angles<br />
retrieved using the polarimetric MUSIC approach, assuming 5<br />
scatterers. These results show that the retrieved polarisations<br />
are media depending. The polarisation state responses of the<br />
forest ground and the grass field are not the same. The<br />
response of the ground over the forest is a linear polarisation<br />
(τ =0◦ ) with an orientation about 15◦ , whereas the polarisation<br />
over the grass field is horizontal linear polarisation,<br />
characteristic of a surface reflection by a wave emitted in<br />
a horizontal polarisation. Over the building, the polarisation<br />
state is similar with that the ground under the forest. Over the<br />
forest canopy, polarimetric responses are random, as it can be<br />
expected from the random behaviour of this kind of media.<br />
This polarimetric approach of the <strong>SAR</strong> tomography shows<br />
that the polarimetric behaviour is depending with the media<br />
observed and make it possible to characterise partially targets<br />
in terms of height position but also by their physical properties.<br />
IV. CONCLUSION<br />
This paper presents the first step into polarimetric <strong>SAR</strong><br />
tomography. In a first part, hight resolution methods were used<br />
to generate high quality tomograms. The results obtained show<br />
an improvement compared to the initial results, and different<br />
scatterers have been detected. Nevertheless, unless having<br />
the ground-truth of the area under study, the mono-channel<br />
approach of the <strong>SAR</strong> tomography does not make it possible<br />
to identify the nature of the scattering mechanism detected.<br />
For stage with this disadvantage, a polarimetric approach of<br />
the <strong>SAR</strong> tomography approach is proposed. Like the Caponbased<br />
result data are not coherent and it is not possible to apply<br />
to the obtained data a simple polarimetric decomposition like,<br />
for instance, the Pauli decomposition, which is related to some<br />
basic scattering mechanisms, a polarisation state estimation<br />
based on a extension of the MUSIC algorithm has been<br />
proposed. This method takes into account partially polarised<br />
data. It is shown that the polarimetric behaviour is depending<br />
with the observed media and the partial characterisation of the<br />
target is possible. In the future, a use of fully polarimetric data<br />
will be necessary to completely characterize the objects.<br />
ACKNOWLEDGMENT<br />
This work was supported by the German Science Foundation<br />
DFG, under project No. RE 1698/1.<br />
REFERENCES<br />
[1] A. Reigber and A. Moreira, “First Demonstration of Airborne <strong>SAR</strong><br />
<strong>Tomography</strong> using Multibaseline L-band Data,” IEEE Trans. Geosci.<br />
Remote Sensing, vol. 38, pp. 2142–2152, September 2000.<br />
[2] F. Lombardini and A. Reigber, “Adaptive Spectral Estimation for<br />
Multibaseline <strong>SAR</strong> <strong>Tomography</strong> with Airborne L-band Data,” in Proc.<br />
IGARSS’03, (Toulouse, France), July 2003.<br />
[3] S. Guillaso and A. Reigber, “<strong>Polarimetric</strong> <strong>SAR</strong> <strong>Tomography</strong>,” in Proc.<br />
POLI<strong>SAR</strong>’05, (Frascati, Italy), 2005.<br />
[4] S. Guillaso, A. Reigber, and L. Ferro-Famil, “Evaluation of the ESPRIT<br />
Approach in <strong>Polarimetric</strong> Interferometric <strong>SAR</strong>,” in Proc. IGARSS’05,<br />
(Seoul, Korea), Jul. 2005.<br />
[5] P. Stoica and R. Moses, Introduction to Spectral Analysis. N. J.: Prentice<br />
Hall, 1997.<br />
[6] A. Reigber, P. Prats, and J. J. Mallorqui, “Refined estimation of<br />
time-varying baseline errors in airborne <strong>SAR</strong> interferometry,” in Proc.<br />
IGARSS’05, (Seoul, Korea), Jul. 2005.<br />
[7] S. R. Cloude and E. Pottier, “An Entropy Based Classification Scheme<br />
for Land Applications of <strong>Polarimetric</strong> <strong>SAR</strong>,” IEEE Trans. Geosci. Remote<br />
Sensing, vol. 35, pp. 68–78, Jan. 1997.<br />
[8] E. Ferrara and T. Parks, “Direction finding with an array of antennas<br />
having diverse polarizations,” IEEE Trans. Antennas Propagat., vol.AP-<br />
31, pp. 231–236, March 1983.