Parabolic Curve fitting as an 3D Trajectory Estimation of the Soccer ...
Parabolic Curve fitting as an 3D Trajectory Estimation of the Soccer ...
Parabolic Curve fitting as an 3D Trajectory Estimation of the Soccer ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
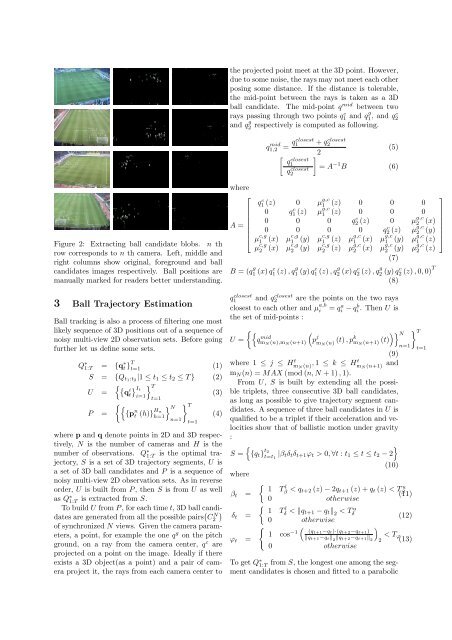
Figure 2: Extracting ball c<strong>an</strong>didate blobs. n throw corresponds to n th camera. Left, middle <strong>an</strong>dright columns show original, foreground <strong>an</strong>d ballc<strong>an</strong>didates images respectively. Ball positions arem<strong>an</strong>ually marked for readers better underst<strong>an</strong>ding.3 Ball <strong>Trajectory</strong> <strong>Estimation</strong>Ball tracking is also a process <strong>of</strong> filtering one mostlikely sequence <strong>of</strong> <strong>3D</strong> positions out <strong>of</strong> a sequence <strong>of</strong>noisy multi-view 2D observation sets. Before goingfur<strong>the</strong>r let us define some sets.Q ∗ 1:T = {q ∗ t } T t=1(1)S = {Q t1 :t 2|1 ≤ t 1 ≤ t 2 ≤ T } (2){ {q }i It TU = t i=1}(3)t=1{ { } NP = {p n t (h)} H nh=1(4)n=1} Tt=1where p <strong>an</strong>d q denote points in 2D <strong>an</strong>d <strong>3D</strong> respectively,N is <strong>the</strong> number <strong>of</strong> camer<strong>as</strong> <strong>an</strong>d H is <strong>the</strong>number <strong>of</strong> observations. Q ∗ 1:T is <strong>the</strong> optimal trajectory,S is a set <strong>of</strong> <strong>3D</strong> trajectory segments, U isa set <strong>of</strong> <strong>3D</strong> ball c<strong>an</strong>didates <strong>an</strong>d P is a sequence <strong>of</strong>noisy multi-view 2D observation sets. As in reverseorder, U is built from P , <strong>the</strong>n S is from U <strong>as</strong> well<strong>as</strong> Q ∗ 1:T is extracted from S.To build U from P , for each time t, <strong>3D</strong> ball c<strong>an</strong>didatesare generated from all <strong>the</strong> possible pairs ( )C2N<strong>of</strong> synchronized N views. Given <strong>the</strong> camera parameters,a point, for example <strong>the</strong> one q g on <strong>the</strong> pitchground, on a ray from <strong>the</strong> camera center, q c areprojected on a point on <strong>the</strong> image. Ideally if <strong>the</strong>reexists a <strong>3D</strong> object(<strong>as</strong> a point) <strong>an</strong>d a pair <strong>of</strong> cameraproject it, <strong>the</strong> rays from each camera center to<strong>the</strong> projected point meet at <strong>the</strong> <strong>3D</strong> point. However,due to some noise, <strong>the</strong> rays may not meet each o<strong>the</strong>rposing some dist<strong>an</strong>ce. If <strong>the</strong> dist<strong>an</strong>ce is tolerable,<strong>the</strong> mid-point between <strong>the</strong> rays is taken <strong>as</strong> a <strong>3D</strong>ball c<strong>an</strong>didate. The mid-point q mid between tworays p<strong>as</strong>sing through two points q1 c <strong>an</strong>d q g 1 , <strong>an</strong>d qc 2<strong>an</strong>d q g 2 respectively is computed <strong>as</strong> following.where⎡A =⎢⎣q1,2 mid = qclosest1 + q2closest]2(5)= A −1 B (6)[ qclosest1q closest2q1 c (z) 0 µ g,c1 (z) 0 0 00 q1 c (z) µ g,c1 (z) 0 0 00 0 0 q2 c (z) 0 µ g,c2 (x)0 0 0 0 q2 c (z) µ g,c2 (y)µ c,g1 (x) µ c,g1 (y) µ c,g1 (z) µ g,c1 (x) µ g,c1 (y) µ g,c1 (z)µ c,g2 (x) µ c,g2 (y) µ c,g2 (z) µ g,c2 (x) µ g,c2 (y) µ g,c2 (z)(7)B = (q g 1 (x) qc 1 (z) , q g 1 (y) qc 1 (z) , q g 2 (x) qc 2 (z) , q g 2 (y) qc 2 (z) , 0, 0) T(8)q1 closest <strong>an</strong>d q2 closest are <strong>the</strong> points on <strong>the</strong> two raysclosest to each o<strong>the</strong>r <strong>an</strong>d µ a,bi = qi a − qb i . Then U is<strong>the</strong> set <strong>of</strong> mid-points :{ { ()} } N TU = qm midN (n),m N (n+1) p j m N (n) (t) , pk m N (n+1) (t) n=1t=1(9)where 1 ≤ j ≤ Hm t N (n) , 1 ≤ k ≤ Ht m N (n+1) <strong>an</strong>dm N (n) = MAX (mod (n, N + 1) , 1).From U, S is built by extending all <strong>the</strong> possibletriplets, three consecutive <strong>3D</strong> ball c<strong>an</strong>didates,<strong>as</strong> long <strong>as</strong> possible to give trajectory segment c<strong>an</strong>didates.A sequence <strong>of</strong> three ball c<strong>an</strong>didates in U isqualified to be a triplet if <strong>the</strong>ir acceleration <strong>an</strong>d velocitiesshow that <strong>of</strong> ballistic motion under gravity:S =whereβ t =δ t =ϕ t ={}{q t } t 2t=t 1|β t δ t δ t+1 ϕ t > 0, ∀t : t 1 ≤ t ≤ t 2 − 2(10){ 1 Tlβ< q t+2 (z) − 2q t+1 (z) + q t (z) < Tβ(11)u0 o<strong>the</strong>rwise{1 Tlδ< ‖q t+1 − q t ‖ 2< Tδu (12)0 o<strong>the</strong>rwise{ (1 cos −1 (qt+1−q t)·(q t+2−q t+1)‖q t+1−q t‖ 2 ‖q t+2−q t+1‖< T ϕ2)2 (13)0 o<strong>the</strong>rwiseTo get Q ∗ 1:T from S, <strong>the</strong> longest one among <strong>the</strong> segmentc<strong>an</strong>didates is chosen <strong>an</strong>d fitted to a parabolic⎤⎥⎦