Chapter 4 General Vector Spaces Face Recognition ( á¹¢å ± å½å¬)
Chapter 4 General Vector Spaces Face Recognition ( á¹¢å ± å½å¬)
Chapter 4 General Vector Spaces Face Recognition ( á¹¢å ± å½å¬)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
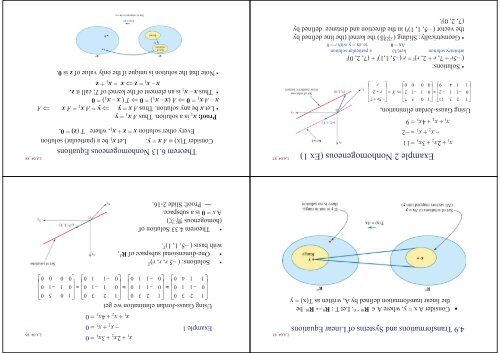
4.9 Transformations and Systems of Linear Equations Consider A x = y, where A R m n . Let T : R n R m bethe linear transformation defined by A, written as T(x) = yx1x1 2 x xExample 2 Nonhomogeneous (Ex 1)2x223xx 4 x333 11 2 9Using Gauss-Jordan elimination,1 2 30 1 11 1 411 29 1 0 5 70 1 1 20 0 0 0 5 r X r 2 r7 • Solutions:( –5r + 7, r + 2, r) t = r (–5, 1,1) t + (7, 2, 0) tarbitrary solution ker(A) a particular solutionAx = 0 to Ax = y with r = 0• Geometrically: Sliding () the kernel (the line defined bythe vector ( –5, 1, 1) t ) in the direction and distance defined by(7, 2, 0) t .LA 04_85LA 04_87x1 2 x2 3Example 1 x2x1 x2 4Using Gauss-Jordan elimination we get3 0 1 21 0 0 11 0 0 1 1 2 3 0 1 2 0 1 1 0 0 1 1 1 4 0 0 1 xxx333311000000100010510000LA 04_86• Solutions: ( –5 r, r, r) T• One-dimensional subspace of R 3 ,with basis ( –5, 1, 1) T .• Theorem 4.33 Solution of(homogenous )A x = 0 is a subspace. Proof: Slide 2-16.Theorem 6.13 Nonhomogeneous EquationsConsider T(x) A x = y. Let x 1 be a (particular) solutionEvery other solution x = z + x 1 , where T (z) = 0.LA 04_88Proof: x 1 is a solution. Thus A x 1 = y.•Let x be any solution. Thus A x = y y = A x 1 = A x Ax – A x 1 = 0 A (x – x 1 )= 0 T ( x – x 1 )= 0• Thus x – x 1 is an element of the kernel of T; call it z.x – x 1 = z x = x 1 + z• Note that the solution is unique if the only value of z is 0.