Applied and Computational Algebraic Topology (ACAT) - European ...
Applied and Computational Algebraic Topology (ACAT) - European ...
Applied and Computational Algebraic Topology (ACAT) - European ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Research Networking Programme<strong>Applied</strong> <strong>and</strong> <strong>Computational</strong><strong>Algebraic</strong> <strong>Topology</strong> (<strong>ACAT</strong>)St<strong>and</strong>ing Committee for Physical <strong>and</strong> Engineering Sciences (PESC)
The revolutionary growth of experimental data in the sciences<strong>and</strong> the availability of unprecedented computing power posemany challenges to contemporary mathematics. This ESFResearch Networking Programme on applied <strong>and</strong> computationalalgebraic topology (<strong>ACAT</strong>) combines efforts of researchersthroughout Europe developing mathematical tools for thefollowing broad research themes:• the topological <strong>and</strong> statistical analysis of shapes, images, <strong>and</strong>high-dimensional data sets;• algorithms for motion planning <strong>and</strong> the study of configurationspaces of mechanical systems;• stochastic topology <strong>and</strong> the study of large growing systems;• the theory of concurrent computation <strong>and</strong> computer networks.Research on these themes is currently carried out in smallgroups spread over several <strong>European</strong> countries. The Networkfacilitates intensified interactions <strong>and</strong> cross-fertilisation, whichwe predict will lead to new results <strong>and</strong> entire new researchdirections as well as to commercial applications. The Networkorganises summer schools <strong>and</strong> conferences to support theformation of an integrated research community in applied <strong>and</strong>computational algebraic topology <strong>and</strong> to attract an increasingnumber of students to the field. Research visits to departmentsin <strong>European</strong> countries may be facilitated by short visit <strong>and</strong>exchange grants. The Network actively collaborates with expertsoutside Europe.The running period of the ESF <strong>ACAT</strong> Research NetworkingProgramme is for four years, from July 2011 to July 2015.
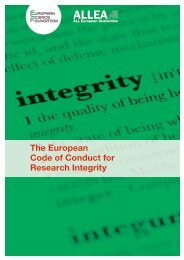
Scientific BackgroundFigure 1.Two interacting proteins taken apart after computingthe interface surface of the complexed form.The front cover shows a two-dimensionalrendering of a protein–protein interface.After constructing the interface (see Figureabove), it is flattened <strong>and</strong> deformed into around disk. Since the interface separatestwo proteins, the disk is coloured onboth sides, each colour indicating theneighbouring amino acid type. Oneside is rendered transparent, indicatingthe coloured regions with narrow stripsoutlining the boundary. We see clearlywhich amino acids of the two proteinsinteract. (Courtesy of work by AndrewBan, Herbert Edelsbrunner <strong>and</strong> JohannesRudolph as part of the biogeometry projectfunded by NSF, 2001-2006.)A particularly delicate step is theselection of the finite portion of the infinitesurface that separates two proteinssitting in three-dimensional space. Allneighbourhood information of the aminoacids is already contained in that surface,but flattening it <strong>and</strong> colouring the regionsas shown makes the result much morecompelling <strong>and</strong> easier to comprehend. Theneighbourhood information is topological<strong>and</strong> may be represented by weightednetworks of amino acids <strong>and</strong>/or proteins.It is still not known how to predict theinteraction given the structural knowledgeof the two proteins in space individually, butnot put together forming the complex. Thecomputational problem of this predictionis known as the protein–protein dockingproblem.The mathematical discipline of algebraictopology forms the background forseveral areas of application-orientedmathematical research. The aim is todevelop new theoretical instruments <strong>and</strong>algorithms connecting topological methodswith applications. The last two decadeshave shown that this is both possible<strong>and</strong> mutually beneficial. The growingnumber of such connections has givenrise to the emerging field of applied <strong>and</strong>computational algebraic topology (<strong>ACAT</strong>),which includes the following areas:• computational algebraic topology;• topological robotics;• stochastic topology;• combinatorial algebraic topology <strong>and</strong>concurrency.We give a brief description of thebackground <strong>and</strong> the main aims for eachof these research areas. <strong>ACAT</strong> facilitatesresearch within each of these areas<strong>and</strong> enhances collaboration betweenresearchers in different areas.<strong>Computational</strong> <strong>Algebraic</strong> <strong>Topology</strong>This area deals with the analysis of shapes,images, <strong>and</strong> high-dimensional data sets. Itis often based on a filtration that representsthe space across scale levels, from fine tocoarse. Combinatorial complexes can beconstructed to represent the data at a givenlevel, <strong>and</strong> topological invariants of those(e.g. ranks of homology groups) can bedetermined. The interest is in persistence,i.e. the length of the activity interval of suchan invariant along the filtration. Persistencediagrams in the plane are combinatorialrepresentations of the homologicalinformation contained in the filtration. Theyform an invariant of the filtration <strong>and</strong> arestable under perturbations. This pavesthe way for the use of homology in a widerange of applications in mathematics<strong>and</strong> computing but also in the sciences<strong>and</strong> engineering (for an introduction, see<strong>ACAT</strong> • 3
<strong>Computational</strong> <strong>Topology</strong>, an Introduction,by H. Edelsbrunner & J.L Harer, AmericanMathematical Society, 2010).The development underpins the needfor fast algorithms to compute homologyfor data sets of a few million elements ormore, which arise in diverse areas suchas image analysis, dynamical systems,robotics, electromagnetic engineering,<strong>and</strong> material science. Similar methods areapplied in the classification of shapes <strong>and</strong>their retrieval from databases. An essentialingredient in this undertaking is a measureof dissimilarity between shapes. If weenhance shapes by functions on them, wecan use the pseudo-distance that can beapproximated by persistent homology. Wecontinue by listing a few of the questions tobe investigated by members of this project:• Well modules have recently beenintroduced to measure the robustness ofintersections <strong>and</strong> to prove the stability ofcontours of mappings. They can also beused to formulate a notion of robustness forfixed points of mappings. Can these ideasbe further developed to obtain a notion ofpersistence for dynamical systems? On arelated note, we need a notion of persistenthomology for maps, <strong>and</strong> fast algorithms.• Image processing raises a number ofchallenges to our underst<strong>and</strong>ing of ourtopological tools. How do we use persistenthomology under partial information, suchas partially occluded shapes?• Filtrations are generated by real-valuedfunctions on the space. Replacing thefunctions by vector-valued mappingsgives multi-parameter filtrations. A deeperunderst<strong>and</strong>ing of the rank invariant of thesemore general filtrations is important forapplications in shape analysis <strong>and</strong> retrieval.• Homology algorithms can be extendedto computing cohomology, which isparticularly important in electromagneticengineering. The running timecharacteristics of the cohomology variantsare likely to be different from the homologyalgorithms, <strong>and</strong> this difference needs to beexplored.• Matrix reduction algorithms lendthemselves to implementations on parallelcomputer architectures, which promise afurther increase in efficiency. We need tounderst<strong>and</strong> which reduction algorithms arebest suited for this effort.Topological RoboticsThis mathematical discipline studiestopological problems relevant to practicalapplications in modern robotics,engineering <strong>and</strong> computer science. Withany mechanical system, one associatesthe configuration space, which encodes alladmissible configurations of the system.Many important engineering questionsabout the system reduce to geometricquestions about the configuration space.For instance, the connectivity of theconfiguration space means that themechanical system is fully controllable.In other words, we can bring the systemfrom any initial state to any desiredstate by a continuous motion. Curiously,the interaction between topology <strong>and</strong>mechanical engineering is bi-directionalbecause any smooth manifold can berealised as configuration space of amechanical system. We continue byoutlining a few broad topics within the area.• Configuration spaces of simple linkagesrepresent an interesting class of closedsmooth manifolds. These remarkablespaces are also known as polygon spacesbecause they parameterise the spaceof all n-sided polygons with given sidelengths. In the last few years significantprogress has been made in classification ofconfiguration spaces of linkages leading toa solution of the Walker conjecture, whichis a question about the invertibility of themapping from a linking to its configurationspace.4 • <strong>ACAT</strong>
• The motion planning problem plays aprominent role in modern robotics. Anautonomous mechanical system must beable to select a motion once the current<strong>and</strong> the desired states are given; such aselection is made by a motion planningalgorithm. Continuous motion planningalgorithms rarely exist, which explainswhy decisions are often discontinuousas functions of the input data. The notionof topological complexity measuresthese discontinuities numerically. Manyproperties of this notion are known, but itscomputation in general is quite difficult; asituation similar to the related Lusternik-Schnirelmann category.• We plan to apply the theory of motionplanning algorithms in the context ofdirected topological spaces when onlydirected paths between the source <strong>and</strong> thetarget are allowed. This theory would thenbe applicable to problems of concurrentcomputation, as discussed below. We alsoplan to create appropriate cohomologicaltools for estimating the sectional categoryof fibrations. This will involve strengthening<strong>and</strong> generalising the technique of categoryweight of cohomology classes <strong>and</strong> usingcohomology operations, as suggested byFadell <strong>and</strong> Husseini in the context of theLusternik-Schnirelmann category.Stochastic <strong>Topology</strong>In applications with large mechanicalsystems, the traditional concept of aconfiguration space is unfortunatelyinadequate. For a mechanical system ofgreat complexity, it is unrealistic to assumethat its configuration space can be fullyknown or completely described. It is morereasonable to assume that the space of allpossible states of such a system can beunderstood only approximately, or that itis described using probabilistic methods.Similar problems arise in modeling oflarge financial, biological <strong>and</strong> ecologicalsystems. This motivates the study ofr<strong>and</strong>om manifolds <strong>and</strong> r<strong>and</strong>om simplicialcomplexes as models for large systems.We continue with a number of specialisedtopics in the area:• Recent results about topology of linkageswith r<strong>and</strong>om length parameters showthat despite limited information one maypredict the outcome topology, say, the Bettinumbers, with surprising precision. Thishappens in situations when the systemdepends on many independent r<strong>and</strong>omparameters, similar to the classical centrallimit theorem.• We plan to study models that producehigh-dimensional r<strong>and</strong>om complexes(generalising the well-developed theoryof r<strong>and</strong>om graphs) <strong>and</strong> investigate theirapplications in engineering <strong>and</strong> computerscience. This includes the Linial-Meshulammodel which has been studied extensivelyin recent years.Figure 2. Underwater robot with sense of touch.© DFKI Bremen<strong>ACAT</strong> • 5
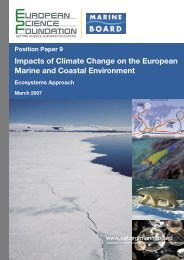
• A recent <strong>and</strong> dynamic branch ofcombinatorial algebraic topology alsobrings probability aspects into play. Therehave been several developments studyingprobability spaces arising naturally intopology, <strong>and</strong> establishing thresholdsfor non-triviality of various algebraicinvariants. The idea is to incorporateinto the computational model not justthe final data sample, but the samplingprocess itself. These methods giveglobal quality assessment invariants forspecific computations in terms of tools ofprobability theory.• One hopes that it will be possibleto answer some famous outst<strong>and</strong>ingopen problems about two-dimensionalcomplexes, such as the Whitehead orthe Eilenberg-Ganea conjectures usingprobabilistic tools. The methods involvingprobability were successfully used inthe past in other areas of mathematicsto construct objects with curiouscombinations of properties.Combinatorial <strong>Algebraic</strong> <strong>Topology</strong><strong>and</strong> Concurrency TheoryThe idea of combinatorial algebraictopology is to form complexes thatrepresent collections of configurations,for example the set of all colourings ofa graph, or the set of all executions of aprotocol. The complexes are typically highdimensional<strong>and</strong> have a high degree ofsymmetry. These are expressed via actionsof the symmetric group or of a groupcomposed of subgroups of symmetric orrelated groups. Effective computationsof algebraic invariants exploiting thesesymmetries are still a challenge that willbe pursued within this project. There hasalready been some work exploiting toolsfrom the combinatorial context, such asdiscrete Morse theory, to the calculationof persistent homology, as well as of somerelated invariants. Possibilities for furtherFigure 3.State space in the form of a torus with rectangularholes. © CEA-LIST.connections in this direction are muchgreater than has been explored until now.Equivariant methods have been usefulin connecting combinatorial algebraictopology with applications in computerscience, in particular the feasibilityof distributed systems. This topic isembedded in the larger field of concurrencytheory within theoretical computer science.This field investigates the challengesrepresented by parallel architectures withinan individual computer or within computernetworks; in particular for the assessmentof the correctness <strong>and</strong> safety of nonsequentialdistributed algorithms.A particular concurrency model, thehigher-dimensional automata, can bedescribed by pre-cubical complexes witha direction reflecting the time flow. For amathematical analysis of these models,one has to incorporate direction into tools<strong>and</strong> methods from algebraic topology. Thisis the topic of directed algebraic topology,which uses fast homology algorithms toanalyse the large models arising in practicalapplications. In a directed topologicalspace, a subcategory of the pathcategory is singled out as the (allowable)directed paths. It is important to note that6 • <strong>ACAT</strong>
Fundingthese are most often not invertible. Forapplications, the topological state spacereflects coordination constraints betweenindividual processes, <strong>and</strong> directedness isa property of the time flow. The main aim isto underst<strong>and</strong> the properties of (directed)path spaces associated to a well-structureddirected topological space, to performcalculations of st<strong>and</strong>ard invariants, <strong>and</strong> toinvestigate the sensitivity of these invariantswith respect to the chosen end points.Directed paths in the same componentmodel computation schedules that willalways yield the same result. We mention afew particular questions in the area.• For geometric models of computation,abstract homotopy theory tools yieldmodels for associated spaces of directedpaths in a combinatorial form, i.e. assimplicial complexes. Ongoing workaims to develop this theoretical methodinto algorithms for applications allowingmachine calculations of their homologygroups.• It is desirable to decompose a givendirected space into components such thatthe homotopy types of path spaces onlydepend on the components of start <strong>and</strong>end point. If finitely (or countably) manysuch components suffice, it is possibleto describe coarser models that can beused by a machine. The existing theory<strong>and</strong> algorithmic methods apply only toa restricted class of model spaces <strong>and</strong>should be extended to more general <strong>and</strong>realistic settings. A related question isthe application of persistence to possiblyunderst<strong>and</strong> the hierarchical structure ofsuch decompositions.• The literature contains a variety ofsuggestions for a directed replacement ofthe notion homotopy equivalence. We willinvestigate their properties <strong>and</strong> single outwhich of them are most suitable in theory<strong>and</strong> in applications.ESF Research Networking Programmesare principally funded by the Foundation’sMember Organisations on an à la cartebasis. <strong>ACAT</strong> is supported by:• Fonds zur Förderung derwissenschaftlichen Forschungin Österreich (FWF)Austrian Science Fund, Austria• Det Frie Forskningsråd (DFF)The Danish Council for IndependentResearch, Denmark• Aalborg Universitet, Denmark• Deutsche Forschungsgemeinschaft(DFG)German Research Foundation, Germany• Centre National de la RechercheScientifique (CNRS)National Centre for Scientific Research,France• Commissariat à l’Énergie Atomique –Institut LIST (CEA LIST)Atomic Energy Commission –LIST Institute, France• National University of Irel<strong>and</strong>,Galway, Irel<strong>and</strong>• University of Bologna – Centrodi Ricerca Avanzato sui SistemiElettronici, Italy• University of Warsaw, Pol<strong>and</strong>• Jagiellonian University, Pol<strong>and</strong>• Wyzsza Szkola Biznesu –National Louis University, Pol<strong>and</strong>• Nicolaus Copernicus University, Pol<strong>and</strong>• Centro de Matematica da Universidadedo Minho, Portugal• Javna agencija za raziskovalnodejavnost Republike Slovenije (ARRS)Slovenian Research Agency, Slovenia• University of Ljubljana, Slovenia• Universidad de Malaga, Spain• Schweizerischer Nationalfonds (SNF)Swiss National Science Foundation,Switzerl<strong>and</strong>• University of Warwick, United Kingdom<strong>ACAT</strong> • 7
<strong>ACAT</strong> Steering Committee• Professor Martin Raussen (Chair)Department of Mathematical Sciences,Aalborg University, Aalborg • DenmarkEmail: raussen@math.aau.dk• Professor Herbert EdelsbrunnerInstitute of Science & Technology Austria,Klosterneuburg • AustriaEmail: herbert.edelsbrunner@ist.ac.at• Professor Graham EllisDepartment of Mathematics, NationalUniversity of Irel<strong>and</strong>, Galway • Irel<strong>and</strong>Email: graham.ellis@nuigalway.ie• Professor Michael FarberMathematics Institute, Universityof Warwick, Coventry • United KingdomEmail: michaelsfarber@googlemail.com• Professor Dmitry Feichtner-KozlovFB3 Mathematik, University Bremen,Bremen • GermanyEmail: dfk@informatik.uni-bremen.de• Professor Massimo FerriDepartment of Mathematics,University of Bologna, Bologna • ItalyEmail: massimo.ferri@unibo.it• Professor Eric GoubaultCEA <strong>and</strong> École Polytechnique,Gif-sur-Yvette • FranceEmail: eric.goubault@cea.fr• Professor Thomas KappelerInstitute of Mathematics, Universityof Zurich, Zurich • Switzerl<strong>and</strong>Email: thomas.kappeler@math.unizh.ch• Professor Neza Mramor KostaFaculty of Computer <strong>and</strong> InformationScience, University of Ljubljana,Ljubljana • SloveniaEmail: neza.mramor@fri.uni-lj.si• Professor Marian MrozekDepartment of <strong>Computational</strong>Mathematics, Jagiellonian University,Krakow • Pol<strong>and</strong> <strong>and</strong> WSB-NLU,Nowy Sacz • Pol<strong>and</strong>Email: Marian.Mrozek@ii.uj.edu.pl• Professor Aniceto MurilloDept. Algebra Geometria y Topologia,Universidad de Malaga, Malaga • SpainEmail: Aniceto@uma.es• Professor Lucile V<strong>and</strong>embroucqCentro de Matematica, Universidadde Minho, Braga • PortugalEmail: lucile@math.uminho.ptObserver• Professor Roy MeshulamDepartment of Mathematics, Technion –Israel Institute of Technology, Haifa • IsraelEmail: meshulam@tx.technion.ac.ilESF LiaisonDr Thibaut LeryScienceMs Catherine WernerAdministrationPhysical, Engineering <strong>and</strong>Space Sciences Unit<strong>European</strong> Science Foundation1 quai Lezay-Marnésia • BP 9001567080 Strasbourg cedex • FranceTel: +33 (0)3 88 76 71 28Fax: +33 (0)3 88 37 05 32Email: cwerner@esf.orgFor the latest information on this ResearchNetworking Programme consult the <strong>ACAT</strong>websites: www.esf.org/acat<strong>and</strong> acat.lix.polytechnique.fror contact Lisbeth Grubbe Nielsen atgrubbe@math.aau.dkThe <strong>European</strong> Science Foundation (ESF) wasestablished in 1974 to provide a common platformfor its Member Organisations to advance <strong>European</strong>research collaboration <strong>and</strong> explore new directions forresearch. It is an independent organisation, ownedby 72 Member Organisations, which are researchfunding organisations <strong>and</strong> research performingorganisations, academies <strong>and</strong> learned societies from30 countries. ESF promotes collaboration in researchitself, in funding of research <strong>and</strong> in science policyactivities at the <strong>European</strong> level.<strong>European</strong> Science Foundationwww.esf.orgJanuary 2012 – Print run: 10008 • <strong>ACAT</strong>