Volume Representation by Gradient and Distance Fields - Spring ...
Volume Representation by Gradient and Distance Fields - Spring ...
Volume Representation by Gradient and Distance Fields - Spring ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
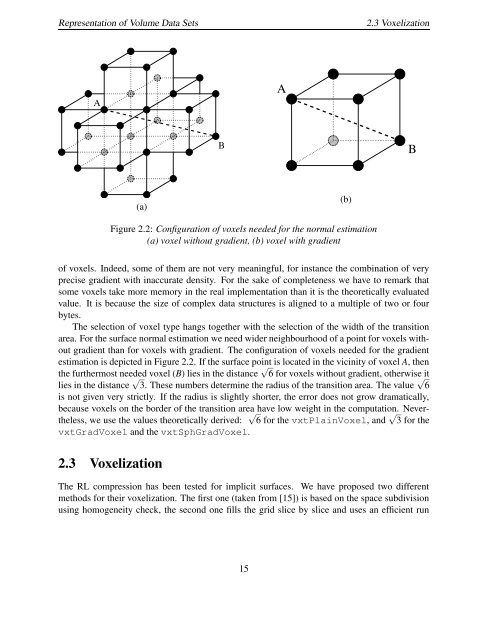
<strong>Representation</strong> of <strong>Volume</strong> Data Sets2.3 VoxelizationAABB(a)(b)Figure 2.2: Configuration of voxels needed for the normal estimation(a) voxel without gradient, (b) voxel with gradientof voxels. Indeed, some of them are not very meaningful, for instance the combination of veryprecise gradient with inaccurate density. For the sake of completeness we have to remark thatsome voxels take more memory in the real implementation than it is the theoretically evaluatedvalue. It is because the size of complex data structures is aligned to a multiple of two or four<strong>by</strong>tes.The selection of voxel type hangs together with the selection of the width of the transitionarea. For the surface normal estimation we need wider neighbourhood of a point for voxels withoutgradient than for voxels with gradient. The configuration of voxels needed for the gradientestimation is depicted in Figure 2.2. If the surface point is located in the vicinity of voxel A, thenthe furthermost needed voxel (B) lies in the distance √ 6 for voxels without gradient, otherwise itlies in the distance √ 3. These numbers determine the radius of the transition area. The value √ 6is not given very strictly. If the radius is slightly shorter, the error does not grow dramatically,because voxels on the border of the transition area √have low weight in the computation. √ Nevertheless,we use the values theoretically derived: 6 for the vxtPlainVoxel, <strong>and</strong> 3 for thevxtGradVoxel <strong>and</strong> the vxtSphGradVoxel.2.3 VoxelizationThe RL compression has been tested for implicit surfaces. We have proposed two differentmethods for their voxelization. The first one (taken from [15]) is based on the space subdivisionusing homogeneity check, the second one fills the grid slice <strong>by</strong> slice <strong>and</strong> uses an efficient run15