Adaptive PI Controller for a Nonlinear System - International ...
Adaptive PI Controller for a Nonlinear System - International ...
Adaptive PI Controller for a Nonlinear System - International ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
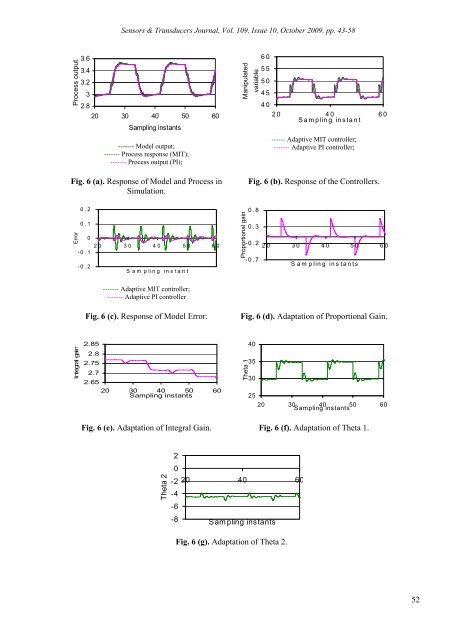
Sensors & Transducers Journal, Vol. 109, Issue 10, October 2009, pp. 43-58Process output3.63.43.232.820 30 40 50 60Sampling instants------- Model output;------- Process response (MIT);------- Process output (<strong>PI</strong>);Fig. 6 (a). Response of Model and Process inSimulation.Manipulatedvariable605550454020 40 60Sampling instant------ <strong>Adaptive</strong> MIT controller;------- <strong>Adaptive</strong> <strong>PI</strong> controller;Fig. 6 (b). Response of the <strong>Controller</strong>s.Error0.20.10-0 .1-0 .220 30 40 50 60S a m p lin g in s ta n tProportional gain0.80.3-0.2-0.720 30 40 50 60Sam pling instants------- <strong>Adaptive</strong> MIT controller;------- <strong>Adaptive</strong> <strong>PI</strong> controllerFig. 6 (c). Response of Model Error.Fig. 6 (d). Adaptation of Proportional Gain.Integral gain2.852.82.752.72.6520 30 40 50 60Sampling instantsTheta 14035302520 30 40 50 60Sampling instantsFig. 6 (e). Adaptation of Integral Gain. Fig. 6 (f). Adaptation of Theta 1.Theta 220-2 20 40 60-4-6-8 Sampling instantsFig. 6 (g). Adaptation of Theta 2.52