Sabertooth 2x5.pdf - Dimension Engineering
Sabertooth 2x5.pdf - Dimension Engineering
Sabertooth 2x5.pdf - Dimension Engineering

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
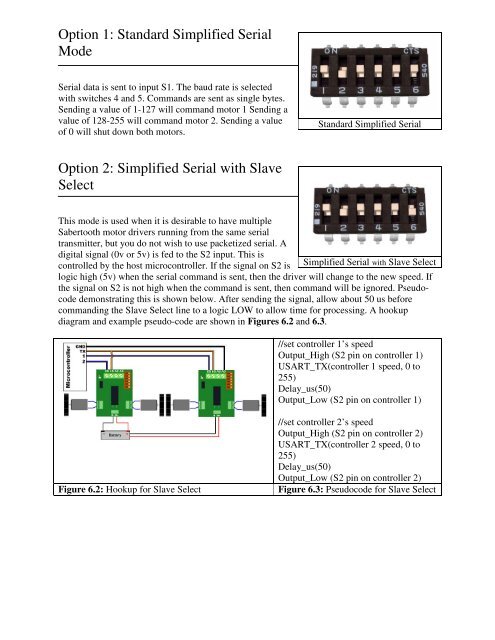
Option 1: Standard Simplified SerialModeSerial data is sent to input S1. The baud rate is selectedwith switches 4 and 5. Commands are sent as single bytes.Sending a value of 1-127 will command motor 1 Sending avalue of 128-255 will command motor 2. Sending a valueof 0 will shut down both motors.Standard Simplified SerialOption 2: Simplified Serial with SlaveSelectThis mode is used when it is desirable to have multiple<strong>Sabertooth</strong> motor drivers running from the same serialtransmitter, but you do not wish to use packetized serial. Adigital signal (0v or 5v) is fed to the S2 input. This iscontrolled by the host microcontroller. If the signal on S2 is Simplified Serial with Slave Selectlogic high (5v) when the serial command is sent, then the driver will change to the new speed. Ifthe signal on S2 is not high when the command is sent, then command will be ignored. Pseudocodedemonstrating this is shown below. After sending the signal, allow about 50 us beforecommanding the Slave Select line to a logic LOW to allow time for processing. A hookupdiagram and example pseudo-code are shown in Figures 6.2 and 6.3.//set controller 1’s speedOutput_High (S2 pin on controller 1)USART_TX(controller 1 speed, 0 to255)Delay_us(50)Output_Low (S2 pin on controller 1)Figure 6.2: Hookup for Slave Select//set controller 2’s speedOutput_High (S2 pin on controller 2)USART_TX(controller 2 speed, 0 to255)Delay_us(50)Output_Low (S2 pin on controller 2)Figure 6.3: Pseudocode for Slave Select