R-net Programmer - Permobil
R-net Programmer - Permobil
R-net Programmer - Permobil

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
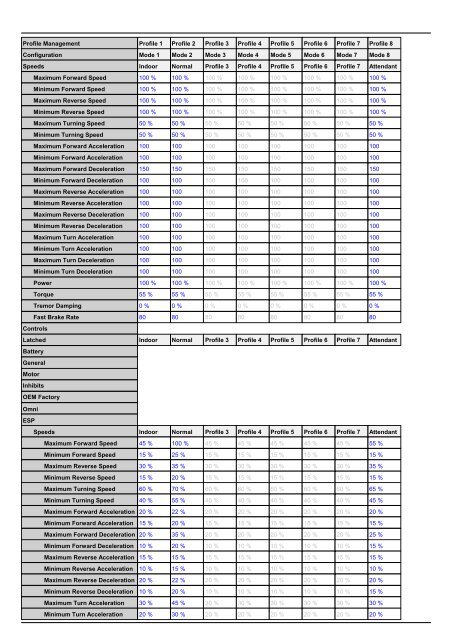
Profile Management Profile 1 Profile 2 Profile 3 Profile 4 Profile 5 Profile 6 Profile 7 Profile 8<br />
Configuration Mode 1 Mode 2 Mode 3 Mode 4 Mode 5 Mode 6 Mode 7 Mode 8<br />
Speeds Indoor Normal Profile 3 Profile 4 Profile 5 Profile 6 Profile 7 Attendant<br />
Maximum Forward Speed 100 % 100 % 100 % 100 % 100 % 100 % 100 % 100 %<br />
Minimum Forward Speed 100 % 100 % 100 % 100 % 100 % 100 % 100 % 100 %<br />
Maximum Reverse Speed 100 % 100 % 100 % 100 % 100 % 100 % 100 % 100 %<br />
Minimum Reverse Speed 100 % 100 % 100 % 100 % 100 % 100 % 100 % 100 %<br />
Maximum Turning Speed 50 % 50 % 50 % 50 % 50 % 50 % 50 % 50 %<br />
Minimum Turning Speed 50 % 50 % 50 % 50 % 50 % 50 % 50 % 50 %<br />
Maximum Forward Acceleration 100 100 100 100 100 100 100 100<br />
Minimum Forward Acceleration 100 100 100 100 100 100 100 100<br />
Maximum Forward Deceleration 150 150 150 150 150 150 150 150<br />
Minimum Forward Deceleration 100 100 100 100 100 100 100 100<br />
Maximum Reverse Acceleration 100 100 100 100 100 100 100 100<br />
Minimum Reverse Acceleration 100 100 100 100 100 100 100 100<br />
Maximum Reverse Deceleration 100 100 100 100 100 100 100 100<br />
Minimum Reverse Deceleration 100 100 100 100 100 100 100 100<br />
Maximum Turn Acceleration 100 100 100 100 100 100 100 100<br />
Minimum Turn Acceleration 100 100 100 100 100 100 100 100<br />
Maximum Turn Deceleration 100 100 100 100 100 100 100 100<br />
Minimum Turn Deceleration 100 100 100 100 100 100 100 100<br />
Power 100 % 100 % 100 % 100 % 100 % 100 % 100 % 100 %<br />
Torque 55 % 55 % 55 % 55 % 55 % 55 % 55 % 55 %<br />
Tremor Damping 0 % 0 % 0 % 0 % 0 % 0 % 0 % 0 %<br />
Fast Brake Rate 80 80 80 80 80 80 80 80<br />
Controls<br />
Latched Indoor Normal Profile 3 Profile 4 Profile 5 Profile 6 Profile 7 Attendant<br />
Battery<br />
General<br />
Motor<br />
Inhibits<br />
OEM Factory<br />
Omni<br />
ESP<br />
Speeds Indoor Normal Profile 3 Profile 4 Profile 5 Profile 6 Profile 7 Attendant<br />
Maximum Forward Speed 45 % 100 % 45 % 45 % 45 % 45 % 45 % 55 %<br />
Minimum Forward Speed 15 % 25 % 15 % 15 % 15 % 15 % 15 % 15 %<br />
Maximum Reverse Speed 30 % 35 % 30 % 30 % 30 % 30 % 30 % 35 %<br />
Minimum Reverse Speed 15 % 20 % 15 % 15 % 15 % 15 % 15 % 15 %<br />
Maximum Turning Speed 60 % 70 % 60 % 60 % 60 % 60 % 60 % 65 %<br />
Minimum Turning Speed 40 % 55 % 40 % 40 % 40 % 40 % 40 % 45 %<br />
Maximum Forward Acceleration 20 % 22 % 20 % 20 % 20 % 20 % 20 % 20 %<br />
Minimum Forward Acceleration 15 % 20 % 15 % 15 % 15 % 15 % 15 % 15 %<br />
Maximum Forward Deceleration 20 % 35 % 20 % 20 % 20 % 20 % 20 % 25 %<br />
Minimum Forward Deceleration 10 % 20 % 10 % 10 % 10 % 10 % 10 % 15 %<br />
Maximum Reverse Acceleration 15 % 15 % 15 % 15 % 15 % 15 % 15 % 15 %<br />
Minimum Reverse Acceleration 10 % 15 % 10 % 10 % 10 % 10 % 10 % 10 %<br />
Maximum Reverse Deceleration 20 % 22 % 20 % 20 % 20 % 20 % 20 % 20 %<br />
Minimum Reverse Deceleration 10 % 20 % 10 % 10 % 10 % 10 % 10 % 15 %<br />
Maximum Turn Acceleration 30 % 45 % 30 % 30 % 30 % 30 % 30 % 30 %<br />
Minimum Turn Acceleration 20 % 30 % 20 % 20 % 20 % 20 % 20 % 20 %
Maximum Turn Deceleration 40 % 50 % 40 % 40 % 40 % 40 % 40 % 40 %<br />
Minimum Turn Deceleration 25 % 35 % 25 % 25 % 25 % 25 % 25 % 25 %<br />
Fast Brake Rate 40 % 50 % 40 % 40 % 40 % 40 % 40 % 40 %<br />
Switched Input No No No No No No No No<br />
Drive Characteristics<br />
Drive Inhibits A B C D<br />
Options