


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Меню прикладных функций FUn-<br />
ПИ-регулятор<br />
Структурная схема<br />
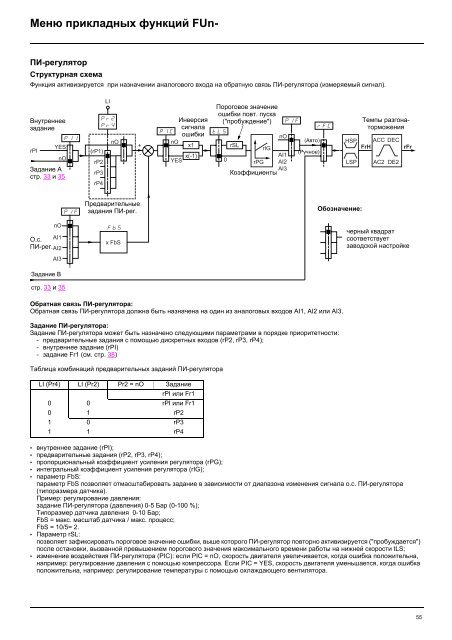
Функция активизируется при назначении аналогового входа на обратную связь ПИ-регулятора (измеряемый сигнал).<br />
Внутреннее<br />
задание<br />
rPI<br />
YES<br />
nO<br />
Задание A<br />
стр. 33 и 35<br />
PII<br />
(rP1)<br />
rP2<br />
rP3<br />
rP4<br />
LI<br />
Pr2<br />
Pr4<br />
nO<br />
+<br />
-<br />
PIC<br />
Инверсия<br />
сигнала<br />
ошибки<br />
nO<br />
x1<br />
x(-1)<br />
YES<br />
Пороговое значение<br />
ошибки повт. пуска<br />
("пробуждение")<br />
tLS<br />
0<br />
nO<br />
rSL<br />
rIG<br />
AI1<br />
rPG AI2<br />
AI3<br />
Коэффициенты<br />
PIF<br />
(Ao)<br />
(Pyoe)<br />
rFC<br />
HSP<br />
LSP<br />
Темпы разгонаторможения<br />
ACC DEC<br />
FrH<br />
rFr<br />
AC2 DE2<br />
PIF<br />
Предварительные<br />
задания ПИ-рег.<br />
Обозначение:<br />
nO<br />
О.с. AI1<br />
ПИ-рег. AI2<br />
AI3<br />
Задание B<br />
стр. 33 и 35<br />
FbS<br />
x FbS<br />
черный квадрат<br />
соответствует<br />
заводской настройке<br />
Обратная связь ПИ-регулятора:<br />
Обратная связь ПИ-регулятора должна быть назначена на один из аналоговых входов AI1, AI2 или AI3.<br />
Задание ПИ-регулятора:<br />
Задание ПИ-регулятора может быть назначено следующими параметрами в порядке приоритетности:<br />
- предварительные задания с помощью дискретных входов (rP2, rP3, rP4);<br />
- внутреннее задание (rPI)<br />
- задание Fr1 (см. стр. 38)<br />
Таблица комбинаций предварительных заданий ПИ-регулятора<br />
LI (Pr4) LI (Pr2) Pr2 = nO Задание<br />
rPI или Fr1<br />
0 0 rPI или Fr1<br />
0 1 rP2<br />
1 0 rP3<br />
1 1 rP4<br />
• внутреннее задание (rPI);<br />
• предварительные задания (rP2, rP3, rP4);<br />
• пропорциональный коэффициент усиления регулятора (rPG);<br />
• интегральный коэффициент усиления регулятора (rIG);<br />
• параметр FbS:<br />
параметр FbS позволяет отмасштабировать задание в зависимости от диапазона изменения сигнала о.с. ПИ-регулятора<br />
(типоразмера датчика).<br />
Пример: регулирование давления:<br />
задание ПИ-регулятора (давления) 0-5 Бар (0-100 %);<br />
Типоразмер датчика давления 0-10 Бар;<br />
FbS = макс. масштаб датчика / макс. процесс;<br />
FbS = 10/5= 2.<br />
• Параметр rSL:<br />
позволяет зафиксировать пороговое значение ошибки, выше которого ПИ-регулятор повторно активизируется ("пробуждается")<br />
после остановки, вызванной превышением порогового значения максимального времени работы на нижней скорости tLS;<br />
• изменение воздействия ПИ-регулятора (PIC): если PIC = nO, скорость двигателя увеличивается, когда ошибка положительна,<br />
например: регулирование давления с помощью компрессора. Если PIC = YES, скорость двигателя уменьшается, когда ошибка<br />
положительна, например: регулирование температуры с помощью охлаждающего вентилятора.<br />
55













