EATR ENERGETICALLY AUTONOMOUS TACTICAL ROBOT
eatrâ¢: energetically autonomous tactical robot - Asimo.pl
eatrâ¢: energetically autonomous tactical robot - Asimo.pl

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
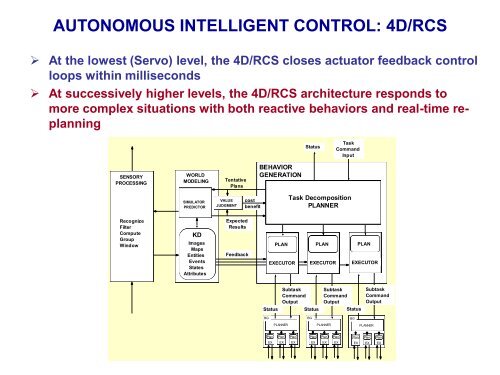
<strong>AUTONOMOUS</strong> INTELLIGENT CONTROL: 4D/RCS<br />
‣ At the lowest (Servo) level, the 4D/RCS closes actuator feedback control<br />
loops within milliseconds<br />
‣ At successively higher levels, the 4D/RCS architecture responds to<br />
more complex situations with both reactive behaviors and real-time replanning<br />
Status<br />
Task<br />
Command<br />
Input<br />
SENSORY<br />
PROCESSING<br />
WORLD<br />
MODELING<br />
Tentative<br />
Plans<br />
BEHAVIOR<br />
GENERATION<br />
SIMULATOR<br />
PREDICTOR<br />
VALUE<br />
JUDGMENT Agent1<br />
cost<br />
benefit<br />
Task Decomposition<br />
PLANNER<br />
Recognize<br />
Filter<br />
Compute<br />
Group<br />
Window<br />
KD<br />
Images<br />
Maps<br />
Entities<br />
Events<br />
States<br />
Attributes<br />
Expected<br />
Results<br />
Feedback<br />
PLAN<br />
EXECUTOR<br />
PLAN<br />
EXECUTOR<br />
PLAN<br />
EXECUTOR<br />
Subtask<br />
Command<br />
Output<br />
Subtask<br />
Command<br />
Output<br />
Status Status Status<br />
Subtask<br />
Command<br />
Output<br />
BG<br />
BG<br />
BG<br />
PLANNER<br />
PLANNER<br />
PLANNER<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX<br />
Plan<br />
EX