
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Cover Feature<br />
ROBOTS<br />
Coding the Robot<br />
Parts List:<br />
With Microsoft MakeCode<br />
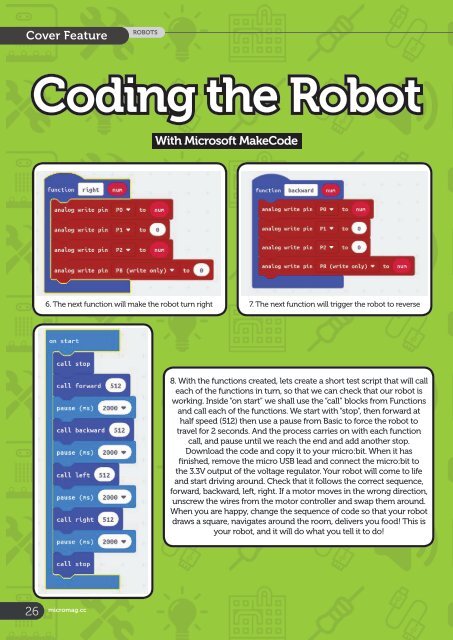
6. The next function will make the robot turn right 7. The next function will trigger the robot to reverse<br />
8. With the functions created, lets create a short test script that will call<br />
each of the functions in turn, so that we can check that our robot is<br />
working. Inside “on start” we shall use the “call” blocks from Functions<br />
and call each of the functions. We start with “stop”, then forward at<br />
half speed (512) then use a pause from Basic to force the robot to<br />
travel for 2 seconds. And the process carries on with each function<br />
call, and pause until we reach the end and add another stop.<br />
Download the code and copy it to your micro:bit. When it has<br />
finished, remove the micro USB lead and connect the micro:bit to<br />
the 3.3V output of the voltage regulator. Your robot will come to life<br />
and start driving around. Check that it follows the correct sequence,<br />
forward, backward, left, right. If a motor moves in the wrong direction,<br />
unscrew the wires from the motor controller and swap them around.<br />
When you are happy, change the sequence of code so that your robot<br />
draws a square, navigates around the room, delivers you food! This is<br />
your robot, and it will do what you tell it to do!<br />
26<br />
<strong>micromag</strong>.cc