PC-based Control for Packaging Machines - download - Beckhoff
PC-based Control for Packaging Machines - download - Beckhoff
PC-based Control for Packaging Machines - download - Beckhoff

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Control</strong><br />
We reserve the right to make technical changes.<br />
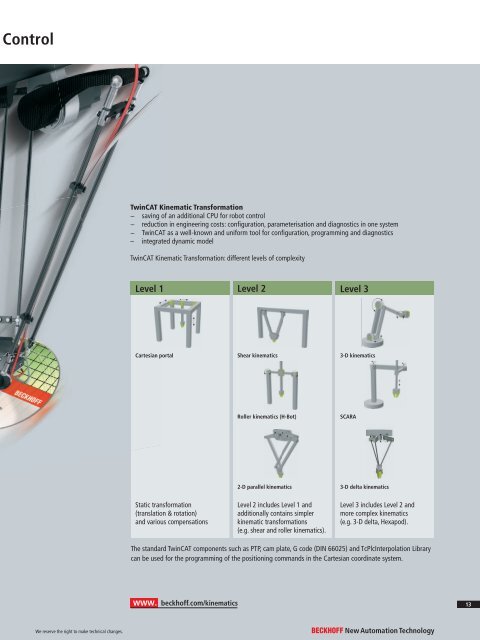
TwinCAT Kinematic Trans<strong>for</strong>mation<br />
− saving of an additional CPU <strong>for</strong> robot control<br />
− reduction in engineering costs: confi guration, parameterisation and diagnostics in one system<br />
− TwinCAT as a well-known and uni<strong>for</strong>m tool <strong>for</strong> confi guration, programming and diagnostics<br />
– integrated dynamic model<br />
TwinCAT Kinematic Trans<strong>for</strong>mation: different levels of complexity<br />
Level 1 Level 2 Level 3<br />
Cartesian portal<br />
Static trans<strong>for</strong>mation<br />
(translation & rotation)<br />
and various compensations<br />
The standard TwinCAT components such as PTP, cam plate, G code (DIN 66025) and TcPlcInterpolation Library<br />
can be used <strong>for</strong> the programming of the positioning commands in the Cartesian coordinate system.<br />
www. beckhoff.com/kinematics<br />
Shear kinematics<br />
Roller kinematics (H-Bot)<br />
2-D parallel kinematics<br />
Level 2 includes Level 1 and<br />
additionally contains simpler<br />
kinematic trans<strong>for</strong>mations<br />
(e.g. shear and roller kinematics).<br />
3-D kinematics<br />
SCARA<br />
3-D delta kinematics<br />
Level 3 includes Level 2 and<br />
more complex kinematics<br />
(e.g. 3-D delta, Hexapod).<br />
BECKHOFF New Automation Technology<br />
13