PC-based Control for the Wood Industry - download - Beckhoff
PC-based Control for the Wood Industry - download - Beckhoff
PC-based Control for the Wood Industry - download - Beckhoff

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
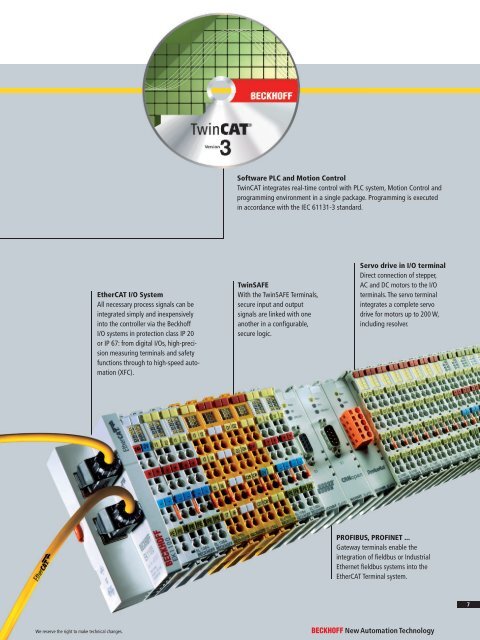
We reserve <strong>the</strong> right to make technical changes.<br />
E<strong>the</strong>rCAT I/O System<br />
All necessary process signals can be<br />
integrated simply and inexpensively<br />
into <strong>the</strong> controller via <strong>the</strong> <strong>Beckhoff</strong><br />
I/O systems in protection class IP 20<br />
or IP 67: from digital I/Os, high-precision<br />
measuring terminals and safety<br />
functions through to high-speed automation<br />
(XFC).<br />
Software PLC and Motion <strong>Control</strong><br />
TwinCAT integrates real-time control with PLC<br />
system, Motion <strong>Control</strong> and<br />
programming environment in a single package. packag Programming is executed<br />
in i accordance d with ithth <strong>the</strong> IEC 61131-3 61131 3 standard. t d d<br />
TwinSAFE<br />
With <strong>the</strong> TwinSAFE Terminals,<br />
secure input and output<br />
signals are linked with one<br />
ano<strong>the</strong>r in a confi gurable,<br />
secure logic.<br />
Servo drive in I/O terminal<br />
Direct connection of stepper,<br />
AC and DC motors to <strong>the</strong> I/O<br />
terminals. The servo terminal<br />
integrates a complete servo<br />
drive <strong>for</strong> motors up to 200 W,<br />
including resolver.<br />
PROFIBUS, PROFINET ...<br />
Gateway terminals enable <strong>the</strong><br />
integration of fi eldbus or Industrial<br />
E<strong>the</strong>rnet fi eldbus systems into <strong>the</strong><br />
E<strong>the</strong>rCAT Terminal system.<br />
BECKHOFF New Automation Technology<br />
7