Acquisition
Acquisition
Acquisition

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Acquisition</strong><br />
Dr. Yossi Rubner<br />
Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros<br />
Outline<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
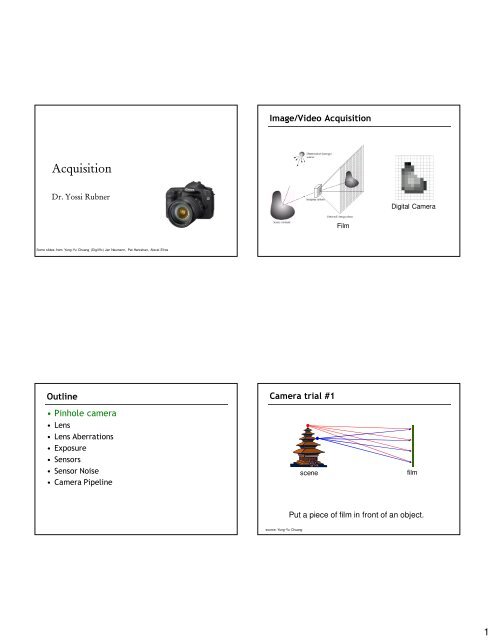
Image/Video <strong>Acquisition</strong><br />
Camera trial #1<br />
source: Yung-Yu Chuang<br />
Film<br />
Digital Camera<br />
scene film<br />
Put a piece of film in front of an object.<br />
1
Pinhole camera<br />
pinhole camera<br />
scene barrier<br />
film<br />
Add a barrier to block off most of the rays<br />
• It reduces blurring<br />
• The pinhole is known as the aperture<br />
• The image is inverted<br />
The Pinhole Camera Model (where)<br />
(X,Y,Z)<br />
d – focal length<br />
y p<br />
(x,y)<br />
x p<br />
d<br />
⎛X<br />
⎞<br />
⎛ x⎞<br />
⎛1<br />
0 0 0⎞⎜<br />
⎟<br />
⎜ ⎟ ⎜<br />
⎟⎜<br />
Y ⎟<br />
⎜ y⎟<br />
= ⎜0<br />
1 0 0⎟⎜<br />
⎟<br />
⎜ ⎟ ⎜<br />
⎟ Z<br />
⎝w⎠<br />
⎝0<br />
0 −1<br />
d 0⎠<br />
⎜<br />
⎟<br />
⎝ 1 ⎠<br />
Y<br />
center of<br />
projection<br />
(pinhole)<br />
X<br />
Z<br />
Shrinking the aperture<br />
Why not making the aperture as small as possible?<br />
• Less light gets through<br />
• Diffraction effect<br />
2
Shrinking the aperture<br />
Sharpest image is obtained when:<br />
pinhole diameter<br />
Example: If<br />
f’ = 50mm,<br />
λ<br />
= 600nm (red),<br />
d = 0.36mm<br />
d = 2 f ' λ<br />
Pinhole Images Outline<br />
Exposure 4 seconds Exposure 96 minutes<br />
Images copyright © 2000 Zero Image Co.<br />
High-end commercial pinhole cameras<br />
~$200<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
3
Adding a lens<br />
(Thin) Lens<br />
scene film<br />
Thin lens equation:<br />
• Any object point satisfying this equation is in focus<br />
Adding a lens<br />
scene lens<br />
film<br />
A lens focuses light onto the film<br />
“circle of<br />
confusion”<br />
• There is a specific distance at which objects are “in focus”<br />
• Other points project to a “circle of confusion” in the image<br />
Circle of Confusion<br />
Circle of confusion proportional to the size of the aperture<br />
4
Aperture controls Depth of Field<br />
• Changing the aperture affects depth of field<br />
– Smaller aperture:<br />
• better DOF<br />
• increased exposure<br />
Thick Lens<br />
• Corrects aberrations<br />
• Change zoom<br />
Depth of Field<br />
Field of View (Zoom)<br />
http://www.cambridgeincolour.com/tutorials/depth-of-field.htm<br />
5
Field of View (Zoom) Simplified Zoom Lens in Operation<br />
FOV depends of Focal Length<br />
f<br />
Smaller FOV = larger Focal Length<br />
Outline<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
From wikipedia<br />
6
Radial Distortion<br />
No distortion Pin cushion Barrel<br />
• Radial distortion of the image<br />
– Caused by imperfect lenses<br />
– Deviations are most noticeable for rays that pass<br />
through the edge of the lens<br />
Radial Distortions<br />
No Distortion Barrel Distortion Pincushion Distortion<br />
• Radial distance from Image Center:<br />
r u = r d + k 1 r d 3<br />
r u = undistorted radius<br />
r d = distorted radius<br />
Correcting radial distortion<br />
from Helmut Dersch<br />
Correcting Radial Distortions<br />
Before After<br />
http://www.grasshopperonline.com/barrel_distortion_correction_software.html<br />
7
Correcting Radial Distortions - Video<br />
Video courtesy of Vigilant Ltd.<br />
Vignetting<br />
Vignetting Chromatic Aberration<br />
L3 L2 L1<br />
• More light passes through lens L3 for scene point A than scene point B<br />
• Results in spatially non-uniform brightness (in the periphery of the image)<br />
A<br />
B<br />
photo by Robert Johnes<br />
longitudinal chromatic aberration transverse chromatic aberration<br />
(axial) (lateral)<br />
8
Chromatic Aberration<br />
longitudinal chromatic<br />
aberration (axial)<br />
Canon EF 85/1.2 L USM<br />
transverse chromatic<br />
aberration (lateral)<br />
Cosina 3.5-4.5/19-35<br />
@ 20 mm<br />
Good lens<br />
Carl Zeiss Distagon<br />
2.8/21<br />
http://www.vanwalree.com/optics/chromatic.html<br />
Chromatic Aberration<br />
Spherical aberration Spherical aberration<br />
• Rays parallel to the axis do not converge<br />
• Outer portions of the lens yield smaller focal lengths<br />
Near Lens Center Near Lens Outer Edge<br />
Spherical lens are free of chromatic aberration but do not focus well.<br />
Parabolic lens does.<br />
9
Astigmatism<br />
Different focal length for inclined rays<br />
Lens Glare<br />
• Stray inter-reflections of light within the optical lens system<br />
• Happens when very bright sources are present in the scene<br />
Reading: http://www.dpreview.com<br />
Coma<br />
point off the axis depicted as comet shaped blob<br />
Outline<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
10
Exposure<br />
• Two main parameters:<br />
– Aperture (in f stop)<br />
– Shutter speed (in fraction of a second)<br />
Aperture<br />
• Aperture is the diameter of the lens opening,<br />
usually specified by f-stop, f/D, a fraction of the<br />
focal length.<br />
– f/2.0 on a 50mm means that the aperture is 25mm<br />
– f/2.0 on a 100mm means that the aperture is 50mm<br />
• When a change in f-stop<br />
occurs, the light is either<br />
doubled or cut in half.<br />
• Lower f-stop, more light<br />
(larger lens opening)<br />
• Higher f-stop, less light<br />
(smaller lens opening)<br />
Types of Shutters Leaf Shutter<br />
• Advantages<br />
– Uniform illumination<br />
– Entire frame illuminated at once<br />
• Disadvantages<br />
– Illumination not constant over time<br />
– Limitations on shutter speed<br />
11
Focal Plane Shutter<br />
Aperture vs. Shutter<br />
• Advantages<br />
– Cost effective (one shutter needed<br />
for all lenses<br />
– Can achieve very fast shutter speeds<br />
(~1/10000 sec)<br />
• Disadvantages<br />
– May cause time distortion<br />
Depth of Field<br />
f/22 f/4<br />
Small Aperture Large Aperture<br />
(Low speed) (High speed)<br />
Shutter speed – Rule of Thumb<br />
• Handheld camera: shutter speed = 1 / f<br />
• Stabilized gear: 2-3 shutter speeds slower<br />
– Optical image stabilization<br />
• Canon - IS (Image Stabilizer) lenses<br />
• Nikon - VR (Vibration Reduction) lenses<br />
• Sigma - OS (Optical Stabilizer) lenses<br />
– CCD-shift stabilization<br />
• Konica Minolta’s Anti-Shake cameras<br />
• Pentax’s Shake-Reduction cameras<br />
Aperture vs. Shutter<br />
1/30 sec. @ f/22<br />
Motion Blur<br />
1/6400 sec. @ f/2.5<br />
Small Aperture Large Aperture<br />
(Low speed) (High speed)<br />
12
High Dynamic Range Image Short exposure<br />
Long exposure<br />
Real world<br />
radiance<br />
Picture<br />
intensity<br />
10 -6 10 6<br />
dynamic range<br />
10 -6 10 6<br />
Pixel value 0 to 255<br />
Real world<br />
radiance<br />
Picture<br />
intensity<br />
10 -6 10 6<br />
dynamic range<br />
10 -6 10 6<br />
Pixel value 0 to 255<br />
Varying shutter speeds<br />
13
HDR – High Dynamic Range Outline<br />
Spatial Sampling<br />
• When a continuous scene is imaged on the<br />
sensor, the continuous image is divided into<br />
discrete elements - picture elements (pixels)<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
Spatial Sampling<br />
14
Sampling<br />
• The density of the sampling denotes the<br />
separation capability of the resulting image<br />
• Image resolution defines the finest details that<br />
are still visible by the image<br />
• We use a cyclic pattern to test the separation<br />
capability of an image<br />
0<br />
Sampling Frequency<br />
x<br />
Sampling Frequency<br />
Nyquist Frequency<br />
• Nyquist Rule: To observe details at frequency f<br />
(wavelength d) one must sample at frequency > 2f<br />
(sampling intervals < d/2)<br />
•<br />
• The Frequency 2f is the NYQUIST frequency.<br />
• Aliasing: If the pattern wavelength is less than 2d<br />
erroneous patterns may be produced.<br />
1D Example:<br />
0<br />
15
Aliasing - Moiré Patterns Quantization<br />
Digitizers (Quantization)<br />
Image Sensors<br />
• Considerations<br />
• Speed<br />
• Resolution<br />
• Signal / Noise Ratio<br />
• Cost<br />
16
MOS (Metal Oxide Semiconductor)<br />
• Photosensitive element<br />
• Charge acquired depends on the number of<br />
photons which reach the element<br />
• CCD devices are arrays of this basic element<br />
CCD (Charge Coupled Device)<br />
• Boyle and Smith, 1969, Bell Labs<br />
• Converts light into electrical signal (pixels)<br />
Photoelectric Effect<br />
Increasing energy<br />
Conduction Band<br />
Valence Band<br />
1.26eV<br />
Hole Electron<br />
• Thermally generated electrons are indistinguishable<br />
from photo-generated electrons � ‘Dark Current’.<br />
CCD Readout<br />
Bucket Brigade<br />
• Integration<br />
• Charge Shift and<br />
Read-out<br />
•Charge Amplifier<br />
17
CMOS (Complementary Metal-Oxide Semiconductor)<br />
• Each pixel owns its own charge-voltage conversion<br />
• No need for external shutter (electronic shutter)<br />
• The chip outputs digital bits<br />
• Much faster than CCD devices<br />
CCD vs. CMOS<br />
• Mature technology<br />
• Specific technology<br />
• High production cost<br />
• High power consumption<br />
• Higher fill factor<br />
• Blooming<br />
• Sequential readout<br />
Spectral Response of a Typical CCD Sensitivity<br />
• Sensitivity<br />
Reset<br />
Output<br />
T int<br />
∆V<br />
• Recent technology<br />
• Standard IC technology<br />
• Cheap<br />
• Low power<br />
• Less sensitive<br />
• Per pixel amplification<br />
• Random pixel access<br />
• Smart pixels<br />
• On chip integration<br />
with other components<br />
– is the ratio of voltage response to the photo energy illuminated.<br />
Voltage Drop (V/s)<br />
Slope = sensitivity<br />
( V / lx-s)<br />
Light intensity (lx)<br />
18
Sensor Size Comparison Sensor Parameters<br />
Fill Factor<br />
• The ratio between the light sensitive pixel area<br />
and the total pixel area.<br />
Total pixel area:<br />
5µm x 5µm<br />
Fill factor ≈ 40%<br />
Photo<br />
Sensing<br />
Area<br />
• Fill factor<br />
– The area in the sensor that is truly sensitive to light<br />
– Shift registers and others can reduce it up to a 30%<br />
• Well capacity<br />
– The quantity of charge that can be stored in each pixel<br />
– Close relation with pixel dimensions<br />
• Integration time:<br />
– Exposure time that is required to excite the CCD elements<br />
– IDepends on the scene brightness<br />
• <strong>Acquisition</strong> time:<br />
– Time needed to transfer the information gathered by the CCD<br />
– Depends on the number of pixels in the sensor<br />
Outline<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
19
Sensor noise<br />
Noise Sources<br />
• Photon noise / Shot Noise (Poisson)<br />
• Dark Noise (Constant)<br />
•Thermal noise (Poisson)<br />
• Resetting (fixed)<br />
• Read-out noise (white & 1/f)<br />
• Blooming<br />
Poisson Distribution, FT = 5<br />
0 .2<br />
0 . 1 5<br />
0 .1<br />
0 . 0 5<br />
(After T. Lomheim, The Aerospace Corporation)<br />
http://www.stw.tu-ilmenau.de/~ff/beruf_cc/cmos/cmos_noise.pdf<br />
0<br />
0 2 0 4 0 6 0 8 0 1 0 0<br />
Poisson Distribution : std equals sqrt of Mean.<br />
σ<br />
2<br />
shot<br />
N<br />
= FT =<br />
N<br />
photons<br />
Photon Shot Noise<br />
• Light is quantum in nature<br />
• Noise due to statistics of the detected photons<br />
themselves<br />
• The probability distribution for N photons to be<br />
counted in an observation time T is Poisson<br />
P<br />
( N | F,<br />
T )<br />
( FT )<br />
N −FT<br />
e<br />
N!<br />
• F = fixed average flux (photons/sec)<br />
Poisson Distribution, FT = 10<br />
0 . 1 4<br />
0 . 1 2<br />
0 .1<br />
0 . 0 8<br />
0 . 0 6<br />
0 . 0 4<br />
0 . 0 2<br />
=<br />
0<br />
0 2 0 4 0 6 0 8 0 1 0 0<br />
N<br />
20
Poisson Distribution, FT = 20<br />
0 .1<br />
0 . 0 8<br />
0 . 0 6<br />
0 . 0 4<br />
0 . 0 2<br />
0<br />
0 2 0 4 0 6 0 8 0 1 0 0<br />
Photon Noise<br />
• More noise in bright parts of the image<br />
• You can identify the white and black regions from<br />
the noise image<br />
N<br />
Poisson Distribution, FT = 50<br />
0 . 0 6<br />
0 . 0 5<br />
0 . 0 4<br />
0 . 0 3<br />
0 . 0 2<br />
0 . 0 1<br />
0<br />
0 2 0 4 0 6 0 8 0 1 0 0<br />
N<br />
• As FT grows, Poisson distribution approaches Gaussian<br />
distribution<br />
• Signal To Noise (SNR) Increases with Mean.<br />
2 2<br />
N N<br />
SNR = = = N<br />
2<br />
σ N<br />
Photon Noise<br />
Photon Noise more noticeable in dark images.<br />
21
Dark Current Noise<br />
• Electron emission when no light<br />
• Dark current noise is high for long exposures<br />
• To remove (some) of it<br />
– Calibrate the camera (make response linear)<br />
– Capture the image of the scene as usual<br />
– Cover the lens with the lens cap and take another<br />
picture<br />
– Subtract the second image from the first image<br />
Quantum Efficiency<br />
• Not every photon hitting a pixel creates a free electron<br />
• Quantum Efficiency (QE) =<br />
– electrons collected / photons hitting the pixel<br />
QE [%]<br />
• QE heavily depends on the<br />
wavelength<br />
• QE < 100% degrades the SNR of a camera<br />
SNR =<br />
e<br />
QE SNR<br />
p<br />
blue � green � red<br />
• Typical max QE values : 25% (CMOS) … 60% (CCD)<br />
lambda [nm]<br />
Dark Current Noise<br />
Original image + Dark Current Noise Image with lens cap on<br />
Sensor noise<br />
ideal relationship between<br />
electrons and impinging photons<br />
Light Signal (QE = 50)<br />
Result of subtraction<br />
CCD capacity limit<br />
Photon Noise affects (QE = 50)<br />
Copyright Timo Autiokari,<br />
22
Outline<br />
• Pinhole camera<br />
• Lens<br />
• Lens Aberrations<br />
• Exposure<br />
• Sensors<br />
• Sensor Noise<br />
• Camera Pipeline<br />
Sensor Response<br />
• The response of a sensor is proportional to the<br />
radiance and the throughput<br />
Camera pipeline<br />
Measurement Equation<br />
• Scene Radiance L(x,ω,t,λ)<br />
• Optics (x’,ω’) = T(x,ω,λ)<br />
• Pixel Response P(x,λ)<br />
• Shutter S(x,ω,t)<br />
23
SLR (Single-Lens Reflex)<br />
• Reflex (R in SLR) means that we see through<br />
the same lens used to take the image.<br />
• Not the case for compact cameras<br />
Camera calibration<br />
• Geometric<br />
– How pixel coordinates relate to directions in<br />
the world<br />
• Photometric<br />
– How pixel values relate to radiance amounts<br />
in the world<br />
SLR view finder<br />
Mirror<br />
(flipped for exposure)<br />
Light from scene<br />
lens<br />
Prism<br />
Mirror<br />
(when viewing)<br />
Color Chart Calibration<br />
Your eye<br />
Film/sensor<br />
• Important preprocessing step for many vision and graphics<br />
algorithms<br />
• Use a color chart with precisely known reflectance<br />
90%<br />
59.1% 36.2% 19.8% 9.0%<br />
3.1%<br />
0<br />
0 ? 1<br />
Irradiance = const * Reflectance<br />
• Use more camera exposures to fill up the curve<br />
• Method assumes constant lighting on all patches and works best<br />
when source is far away<br />
• Unique inverse exists because g is monotonic and smooth<br />
Pixel Values<br />
255<br />
g<br />
−1<br />
g<br />
?<br />
24
Space of response curves Sensing Color<br />
Multi-Chip<br />
wavelength<br />
dependent<br />
light<br />
3 CCD<br />
beam splitter<br />
Field Sequential<br />
Foveon X3 TM<br />
Bayer pattern<br />
25
Field Sequential Field Sequential<br />
Embedded color filters<br />
Color filters can be manufactured directly onto<br />
the photodetectors.<br />
Color filter array<br />
Bayer pattern<br />
Color filter arrays (CFAs)/color filter mosaics<br />
26
Color filter array<br />
Kodak DCS620x<br />
Color filter arrays (CFAs)/color filter mosaics<br />
Bayer’s pattern<br />
Demosaicking CFA’s Color filter array<br />
red green blue output<br />
27
X3 technology<br />
red green blue output<br />
Cameras with X3<br />
Sigma SD10, SD9 Polaroid X530<br />
Hanvision HVDUO<br />
5M/10M<br />
Foveon X3 sensor<br />
Bayer CFA<br />
Color processing<br />
X3 sensor<br />
• After color values are recorded, more color<br />
processing usually happens:<br />
– White balance<br />
– Non-linearity to approximate film response or match<br />
TV monitor gamma<br />
28
White Balance<br />
warmer +3<br />
Gamma Correction<br />
automatic white balance<br />
• Gamma correction applied by the converter<br />
redistributes the pixel luminance values so that<br />
limited brightness range captured by the sensor<br />
is “mapped” to match our eye’s sensitivity.<br />
Gamma = 2.2 is a good match to distribute<br />
relative brightness in a print or in a video<br />
display.<br />
Manual white balance<br />
white balance with<br />
the white book<br />
white balance with<br />
the red book<br />
Gamma =1 vs. Gamma = 2.2<br />
29
Many Sources for Degradation<br />
• Sampling in space<br />
Pixels<br />
• Sampling in intensity<br />
Quantization<br />
• Sampling in color<br />
Color Filter Array (CFA)<br />
• Sampling in time<br />
Exposure, Interlacing<br />
• Sampling in frequency<br />
Lens and pixel PSF (point-spread-function)<br />
30