Aplicaciones de ED de segundo orden - Canek - UAM
Aplicaciones de ED de segundo orden - Canek - UAM
Aplicaciones de ED de segundo orden - Canek - UAM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
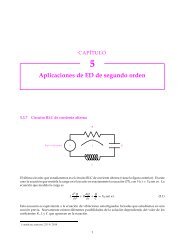
2 Ecuaciones diferenciales ordinarias<br />
La ecuación (5.1) mo<strong>de</strong>la el movimiento amortiguado <strong>de</strong> la masa. En este caso, la fuerza <strong>de</strong> amortiguación<br />
produce una pérdida <strong>de</strong> energía en el sistema masa-resorte, pues ahora no se satisface la ecuación <strong>de</strong> conservación<br />
<strong>de</strong> la energía (??) en la página (??). Es <strong>de</strong> notar que todos los parámetros <strong>de</strong>l mo<strong>de</strong>lo (m, c y k)<br />
son cantida<strong>de</strong>s positivas. La misma ecuación diferencial mo<strong>de</strong>la al sistema masa-resorte colocado verticalmente.<br />
La ecuación característica <strong>de</strong> la ecuación diferencial es<br />
Las dos soluciones <strong>de</strong> esta ecuación cuadrática son<br />
r1 D c C p c 2 4mk<br />
2m<br />
mr 2 C cr C k D 0:<br />
& r2 D c p c2 4mk<br />
: (5.2)<br />
2m<br />
El signo <strong>de</strong>l radicando c 2 4mk <strong>de</strong>termina el tipo <strong>de</strong> movimiento <strong>de</strong>l sistema. Tenemos tres posibilida<strong>de</strong>s:<br />
que el radicando en cuestión sea positivo, negativo o cero. Analizemos a continuación cada uno <strong>de</strong> estos<br />
casos.<br />
Movimiento sobreamortiguado c 2 4mk > 0, es <strong>de</strong>cir c > p 4mk<br />
En el caso c 2 4mk > 0 las dos raíces que aparecen en (5.2) son diferentes y ambas son negativas, esto<br />
implica directamente que la solución <strong>de</strong> la <strong>ED</strong> lineal homogénea es<br />
x.t/ D c1e r1t C c2e r2t ; con r1 D c C p c 2 4mk<br />
2m<br />
& r2 D c p c2 4mk<br />
: (5.3)<br />
2m<br />
Las dos funciones exponenciales que aparecen en (5.3) son <strong>de</strong>crecientes, en consecuencia, no se espera vibración<br />
alguna y el sistema tien<strong>de</strong> rápidamente a regresar a su posición <strong>de</strong> equilibrio, por esa razón <strong>de</strong>cimos<br />
que el movimiento es sobreamortiguado. La forma explícita <strong>de</strong>l movimiento <strong>de</strong>pen<strong>de</strong> <strong>de</strong> las condiciones<br />
iniciales, que a<strong>de</strong>más sirven para <strong>de</strong>terminar las constantes c1, c2.<br />
Por ejemplo, consi<strong>de</strong>remos el caso <strong>de</strong> un sistema masa-resorte-amortiguador con condiciones iniciales<br />
x.0/ D x0, v.0/ D 0. La primera condición x.0/ D x0 se obtiene evaluando la expresión (5.3) en el tiempo<br />
t D 0. Así obtenemos:<br />
Derivando la ecuación (5.3), obtenemos:<br />
x0 D x.0/ D c1 C c2: (5.4)<br />
v.t/ D c1r1e r1t C c2r2e r2t :<br />
Evaluando en t D 0, obtenemos la segunda ecuación a consi<strong>de</strong>rar, es <strong>de</strong>cir,<br />
0 D v.0/ D c1r1 C c2r2: (5.5)<br />
El sistema <strong>de</strong> ecuaciones lineales (5.4) y (5.5) para c1, c2 se pue<strong>de</strong> resolver <strong>de</strong> diferentes formas; en este caso,<br />
si seleccionamos la regla <strong>de</strong> Cramer, obtenemos:<br />
<br />
<br />
<br />
<br />
<br />
1 x0<br />
<br />
<br />
c1 D<br />
x0 1<br />
0 r2<br />
<br />
<br />
1 1 <br />
<br />
<br />
r1 r2<br />
D x0r2<br />
I c2 D<br />
r2 r1<br />
r1 0 <br />
<br />
<br />
1 1 <br />
<br />
<br />
r1 r2<br />
D x0r1<br />
:<br />
r2 r1<br />
Finalmente, sustituyendo en (5.3) obtenemos la siguiente expresión para la posición<br />
x.t/ D x0r2<br />
r2 r1<br />
e r1t<br />
x0r1<br />
r2 r1<br />
e r2t D<br />
x0<br />
r2 r1<br />
.r2e r1t<br />
r1e r2t /: (5.6)