Aplicaciones de ED de segundo orden - Canek - UAM
Aplicaciones de ED de segundo orden - Canek - UAM
Aplicaciones de ED de segundo orden - Canek - UAM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
8 Ecuaciones diferenciales ordinarias<br />
Resolviendo el sistema se obtiene:<br />
c1 D x0 & c2 D v0 C cx0<br />
2m :<br />
Sustituyendo en la ecuación (5.7), obtenemos finalmente que<br />
x.t/ D<br />
<br />
x0 C<br />
<br />
v0 C cx0<br />
2m<br />
<br />
t<br />
<br />
e<br />
c<br />
2m t : (5.10)<br />
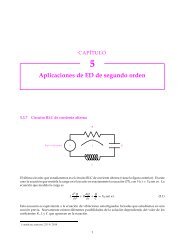
Ejemplo 5.2.3 Consi<strong>de</strong>re un sistema masa-resorte-amortiguador con las constantes siguientes:<br />
c D 4 N s/m; m D 2 kg; k D 2 N/m; x0 D 1 m; v0 D 0 m/s:<br />
Encuentre la posición en el tiempo y elabore una grafica <strong>de</strong> este movimiento.<br />
H La ecuación diferencial <strong>de</strong>l movimiento es<br />
2 d 2x C 4dx C 2x D 0:<br />
dt 2 dt<br />
Cuya ecuación característica es 2r 2 C 4r C 2 D 0, o sea, r 2 C 2r C 1 D .r C 1/ 2 D 0. Las dos soluciones <strong>de</strong><br />
esta ecuación son iguales a r D 1, <strong>de</strong> forma que la solución <strong>de</strong> la ecuación diferencial es<br />
Derivando obtenemos la velocidad:<br />
x.t/ D c1e t C c2te t D .c1 C c2t/e t :<br />
v.t/ D c1e t C c2e t<br />
c2te t D .c2 c1/ e t<br />
c2te t :<br />
Las constantes se <strong>de</strong>terminan utilizando las condiciones iniciales x.0/ D 1 & v.0/ D 0. Tenemos en este caso<br />
el sistema <strong>de</strong> ecuaciones<br />
x.0/ D x0 D 1 ) 1 D c1I<br />
v.0/ D v0 D 0 ) 0 D c2 c1I<br />
<strong>de</strong> don<strong>de</strong> c1 D c2 D 1. Sustituyendo en las expresiones <strong>de</strong> posición y velocidad obtenemos:<br />
Derivando la velocidad obtenemos la aceleración:<br />
x.t/ D .1 C t/ e t mI & v.t/ D te t m/s:<br />
a.t/ D e t C te t D .t 1/ e t m/s 2 :<br />
Observe que en todo tiempo t > 0 la posición es positiva y la velocidad es negativa. Esto significa que la<br />
posición es una función <strong>de</strong>creciente <strong>de</strong>l tiempo. Por otra parte, la aceleración es negativa cuando 0 < t < 1<br />
y positiva cuando t > 1. Esto es, la gráfica <strong>de</strong> la función posición tiene un punto <strong>de</strong> inflexión en t D 1 y la<br />
gráfica <strong>de</strong> la velocidad tiene un mínimo en t D 1. También tenemos que lím x.t/ D 0, por lo tanto, la recta<br />
t!1<br />
x D 0 es una asíntota horizontal <strong>de</strong> x.t/. En las figuras siguientes se muestran las gráficas <strong>de</strong> la posición y<br />
<strong>de</strong> la velocidad <strong>de</strong> la masa:<br />
x<br />
1<br />
t<br />
v<br />
1<br />
t