Una leche de calidad - Albeitar
Una leche de calidad - Albeitar
Una leche de calidad - Albeitar

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
6<br />
<strong>Una</strong> <strong>leche</strong> <strong>de</strong> <strong>calidad</strong><br />
TABLA 5. CORRELACIÓN ENTRE PARÁMETROS (CP) DEL ESTABLO 1.<br />
RCS<br />
Condiciones Condiciones<br />
<strong>de</strong>l robot <strong>de</strong> laboratorio<br />
RCS<br />
CP 1 0,037 -0,235<br />
Significación - NC (0,798) NC (0,104)<br />
Condiciones<br />
CP 0,037 1 -0,235<br />
<strong>de</strong>l robot<br />
Significación NC (0,798) - NC (0,104)<br />
Condiciones<br />
CP -0,235 -0,235 1<br />
<strong>de</strong> laboratorio Significación NC (0,104) NC (0,104) -<br />
n 49 49 49<br />
TABLA 6. CORRELACIÓN ENTRE PARÁMETROS (CP) DEL ESTABLO 2 (**MUY SIGNIFICATIVO).<br />
RCS<br />
Condiciones Condiciones<br />
<strong>de</strong>l robot <strong>de</strong> laboratorio<br />
RCS<br />
CP 1 -0,899** 1**<br />
Significación - 0,000 0,000<br />
Condiciones<br />
CP -0,899** 1 -0,899**<br />
<strong>de</strong>l robot<br />
Significación 0,000 - 0,000<br />
Condiciones<br />
CP 1** -0,899** 1<br />
<strong>de</strong> laboratorio Significación 0,000 0,000 -<br />
n 57 57 57<br />
GRÁFICA 1.<br />
Recuento <strong>de</strong> células somáticas<br />
10.000<br />
8.000<br />
6.000<br />
4.000<br />
2.000<br />
GRÁFICA 2.<br />
CORRELACIÓN ENTRE PARÁMETROS (CONDICIONES DEL ROBOT Y RECUENTO<br />
DE CÉLULAS SOMÁTICAS) SEGÚN LOS MODELOS DE REGRESIÓN MÚLTIPLE.<br />
Observada<br />
0<br />
50 60 70 80 90 100<br />
Condiciones <strong>de</strong>l robot<br />
Lineal<br />
CORRELACIÓN ENTRE PARÁMETROS (CONDICIONES DEL LABORATORIO<br />
Y CONDICIONES DEL ROBOT) SEGÚN LOS MODELOS DE REGRESIÓN MÚLTIPLE.<br />
TABLA 7. CORRELACIÓN ENTRE PARÁMETROS (CP) DEL ESTABLO 3.<br />
100<br />
Observada<br />
Lineal<br />
RCS<br />
Condiciones Condiciones<br />
<strong>de</strong>l robot <strong>de</strong> laboratorio<br />
RCS<br />
CP 1 0,055 0,055<br />
Significación - NC (0,742) NC (0,741)<br />
Condiciones<br />
CP 0,055 1 -0,090<br />
<strong>de</strong>l robot<br />
Significación NC (0,742) - NC (0,587)<br />
Condiciones<br />
CP 0,055 -0,090 1<br />
<strong>de</strong> laboratorio Significación NC (0,741) NC (0,587) -<br />
n 39 39 39<br />
Condiciones <strong>de</strong>l robot<br />
90<br />
80<br />
70<br />
TABLA 8.<br />
ECUACIONES REPRESENTATIVAS DE CADA MODELO DE REGRESIÓN.<br />
60<br />
Establo 1 Y=3797,250-0,684x 1 -582,238x 2<br />
Establo 2 Y=9,592E-03x 1 +175,125x 2 -375,704<br />
Establo 3 Y=30,601x 1 +1160,815x 2 -5349,515<br />
50<br />
3 4 5 6 7<br />
Condiciones <strong>de</strong>l laboratorio<br />
➔<br />
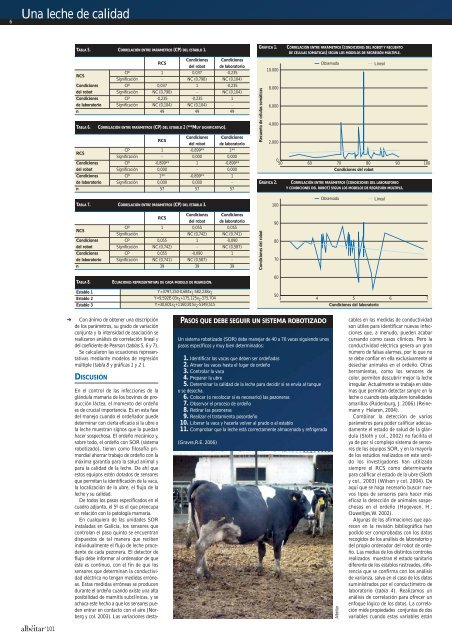
Con ánimo <strong>de</strong> obtener una <strong>de</strong>scripción<br />
<strong>de</strong> los parámetros, su grado <strong>de</strong> variación<br />
conjunta y la intensidad <strong>de</strong> asociación se<br />
realizaron análisis <strong>de</strong> correlación lineal y<br />
<strong>de</strong>l coeficiente <strong>de</strong> Pearson (tablas 5, 6 y 7).<br />
Se calcularon las ecuaciones representativas<br />
mediante mo<strong>de</strong>los <strong>de</strong> regresión<br />
múltiple (tabla 8 y gráficas 1 y 2 ).<br />
DISCUSIÓN<br />
PASOS QUE DEBE SEGUIR UN SISTEMA ROBOTIZADO<br />
Un sistema robotizado (SOR) <strong>de</strong>be manejar <strong>de</strong> 40 a 70 vacas siguiendo unos<br />
pasos específicos y muy bien <strong>de</strong>terminados:<br />
1. I<strong>de</strong>ntificar las vacas que <strong>de</strong>ben ser or<strong>de</strong>ñadas<br />
2. Atraer las vacas hasta el lugar <strong>de</strong> or<strong>de</strong>ño<br />
3. Controlar la vaca<br />
4. Preparar la ubre<br />
5. Determinar la <strong>calidad</strong> <strong>de</strong> la <strong>leche</strong> para <strong>de</strong>cidir si se envía al tanque<br />
o se <strong>de</strong>secha.<br />
6. Colocar (o recolocar si es necesario) las pezoneras<br />
7. Observar el proceso <strong>de</strong> or<strong>de</strong>ño<br />
8. Retirar las pezoneras<br />
9. Realizar el tratamiento posor<strong>de</strong>ño<br />
10. Liberar la vaca y hacerla volver al prado o al establo<br />
11. Comprobar que la <strong>leche</strong> está correctamente almacenada y refrigerada<br />
(Graves,R.E. 2006)<br />
Albéitar<br />
En el control <strong>de</strong> las infecciones <strong>de</strong> la<br />
glándula mamaria <strong>de</strong> los bovinos <strong>de</strong> producción<br />
láctea, el momento <strong>de</strong>l or<strong>de</strong>ño<br />
es <strong>de</strong> crucial importancia. Es en esta fase<br />
<strong>de</strong>l manejo cuando el or<strong>de</strong>ñador pue<strong>de</strong><br />
<strong>de</strong>terminar con cierta eficacia si la ubre o<br />
la <strong>leche</strong> muestran signos que la puedan<br />
hacer sospechosa. El or<strong>de</strong>ño mecánico y,<br />
sobre todo, el or<strong>de</strong>ño con SOR (sistema<br />
robotizado), tienen como filosofía primordial<br />
ahorrar trabajo <strong>de</strong> or<strong>de</strong>ño con la<br />
máxima garantía para la salud animal y<br />
para la <strong>calidad</strong> <strong>de</strong> la <strong>leche</strong>. De ahí que<br />
estos equipos estén dotados <strong>de</strong> sensores<br />
que permitan la i<strong>de</strong>ntificación <strong>de</strong> la vaca,<br />
la localización <strong>de</strong> la ubre, el flujo <strong>de</strong> la<br />
<strong>leche</strong> y su <strong>calidad</strong>.<br />
De todos los pasos especificados en el<br />
cuadro adjunto, el 5º es el que preocupa<br />
en relación con la patología mamaria.<br />
En cualquiera <strong>de</strong> las unida<strong>de</strong>s SOR<br />
instaladas en Galicia, los sensores que<br />
controlan el paso quinto se encuentran<br />
dispuestos <strong>de</strong> tal manera que reciben<br />
individualmente el flujo <strong>de</strong> <strong>leche</strong> proce<strong>de</strong>nte<br />
<strong>de</strong> cada pezonera. El <strong>de</strong>tector <strong>de</strong><br />
flujo <strong>de</strong>be informar al or<strong>de</strong>nador <strong>de</strong> que<br />
éste es continuo, con el fin <strong>de</strong> que los<br />
sensores que <strong>de</strong>terminan la conductividad<br />
eléctrica no tengan medidas erróneas.<br />
Estas medidas erróneas se producen<br />
durante el or<strong>de</strong>ño cuando existe una alta<br />
posibilidad <strong>de</strong> mamitis subclínicas, y se<br />
achaca este hecho a que los sensores pue<strong>de</strong>n<br />
entrar en contacto con el aire (Norberg<br />
y col. 2003). Las variaciones <strong>de</strong>stacables<br />
en las medidas <strong>de</strong> conductividad<br />
son útiles para i<strong>de</strong>ntificar nuevas infecciones<br />
que, a menudo, pue<strong>de</strong>n acabar<br />
cursando como casos clínicos. Pero la<br />
conductividad eléctrica genera un gran<br />
número <strong>de</strong> falsas alarmas, por lo que no<br />
se <strong>de</strong>be confiar en ella exclusivamente al<br />
<strong>de</strong>sechar animales en el or<strong>de</strong>ño. Otras<br />
herramientas, como los sensores <strong>de</strong><br />
color, permiten <strong>de</strong>scubrir mejor la <strong>leche</strong><br />
irregular. Actualmente se trabaja en sistemas<br />
que permitan <strong>de</strong>tectar sangre en la<br />
<strong>leche</strong> o cuando ésta adquiere tonalida<strong>de</strong>s<br />
amarillas (Ro<strong>de</strong>nburg, J. 2006) (Reinemann<br />
y Helaren, 2004).<br />
Combinar la <strong>de</strong>tección <strong>de</strong> varios<br />
parámetros para po<strong>de</strong>r calificar a<strong>de</strong>cuadamente<br />
el estado <strong>de</strong> salud <strong>de</strong> la glándula<br />
(Sloth y col., 2002) no facilita el<br />
ya <strong>de</strong> por sí complejo sistema <strong>de</strong> sensores<br />
<strong>de</strong> los equipos SOR, y en la mayoría<br />
<strong>de</strong> los estudios realizados en este sentido<br />
los investigadores han utilizado<br />
siempre el RCS como <strong>de</strong>terminante<br />
para calificar el estado <strong>de</strong> la ubre (Sloth<br />
y col., 2003) (Wilson y col. 2004). De<br />
aquí que se haga necesario buscar nuevos<br />
tipos <strong>de</strong> sensores para hacer más<br />
eficaz la <strong>de</strong>tección <strong>de</strong> animales sospechosos<br />
en el or<strong>de</strong>ño (Hogeveen, H.;<br />
Ouweltjes,W. 2002).<br />
Algunas <strong>de</strong> las afirmaciones que aparecen<br />
en la revisión bibliográfica han<br />
podido ser comprobadas con los datos<br />
recogidos <strong>de</strong> los análisis <strong>de</strong> laboratorio y<br />
<strong>de</strong>l propio or<strong>de</strong>nador <strong>de</strong>l robot <strong>de</strong> or<strong>de</strong>ño.<br />
Las medias <strong>de</strong> los distintos controles<br />
realizados muestran el estado sanitario<br />
diferente <strong>de</strong> los establos rastreados, diferencia<br />
que se confirma con los análisis<br />
<strong>de</strong> varianza, salvo en el caso <strong>de</strong> los datos<br />
suministrados por el conductímetro <strong>de</strong><br />
laboratorio (tabla 4). Realizamos un<br />
análisis <strong>de</strong> correlación para ofrecer un<br />
enfoque lógico <strong>de</strong> los datos. La correlación<br />
mi<strong>de</strong> propieda<strong>de</strong>s conjuntas <strong>de</strong> dos<br />
variables cuando estas variables están<br />
’101