CapÃtulo 11. Movimiento Oscilatorio - DGEO
CapÃtulo 11. Movimiento Oscilatorio - DGEO
CapÃtulo 11. Movimiento Oscilatorio - DGEO

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
I<br />
2<br />
d θ<br />
= −mgd<br />
2<br />
dt<br />
senθ<br />
Cap. <strong>11.</strong> <strong>Movimiento</strong> oscilatorio.<br />
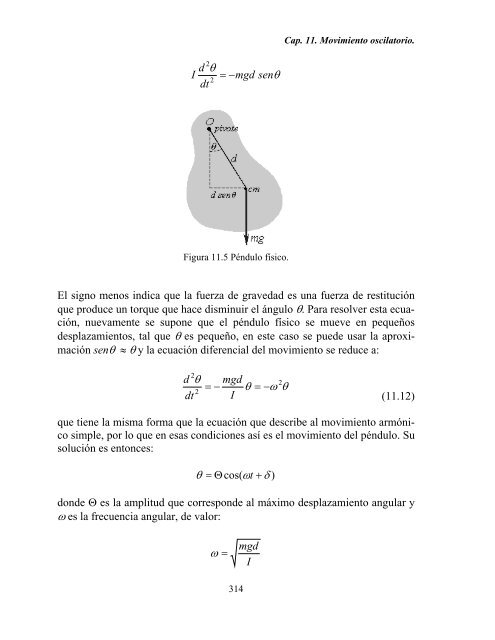
Figura <strong>11.</strong>5 Péndulo físico.<br />
El signo menos indica que la fuerza de gravedad es una fuerza de restitución<br />
que produce un torque que hace disminuir el ángulo θ. Para resolver esta ecuación,<br />
nuevamente se supone que el péndulo físico se mueve en pequeños<br />
desplazamientos, tal que θ es pequeño, en este caso se puede usar la aproximación<br />
senθ ≈ θ y la ecuación diferencial del movimiento se reduce a:<br />
d<br />
dt<br />
2<br />
θ 2<br />
2<br />
mgd<br />
= − θ = −ω<br />
θ<br />
I<br />
(<strong>11.</strong>12)<br />
que tiene la misma forma que la ecuación que describe al movimiento armónico<br />
simple, por lo que en esas condiciones así es el movimiento del péndulo. Su<br />
solución es entonces:<br />
θ = Θcos( ωt<br />
+ δ )<br />
donde Θ es la amplitud que corresponde al máximo desplazamiento angular y<br />
ω es la frecuencia angular, de valor:<br />
ω =<br />
mgd<br />
I<br />
314