Courbes et surfaces gauches - Ecole Nationale Supérieure d ...
Courbes et surfaces gauches - Ecole Nationale Supérieure d ...
Courbes et surfaces gauches - Ecole Nationale Supérieure d ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1<br />
<strong>Courbes</strong> <strong>et</strong> <strong>surfaces</strong> <strong>gauches</strong><br />
Notions <strong>et</strong> définitions<br />
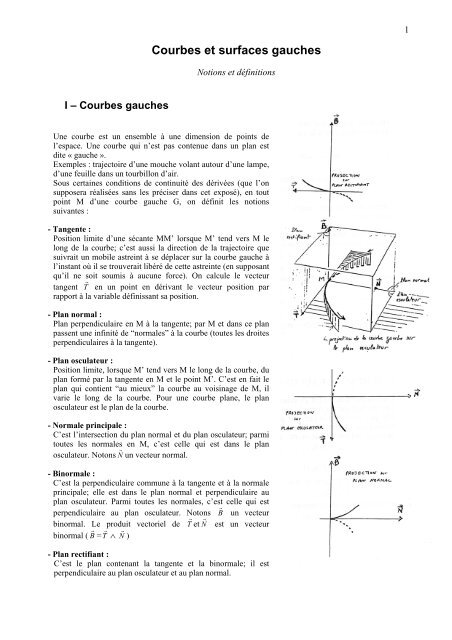
I – <strong>Courbes</strong> <strong>gauches</strong><br />
Une courbe est un ensemble à une dimension de points de<br />
l’espace. Une courbe qui n’est pas contenue dans un plan est<br />
dite « gauche ».<br />
Exemples : trajectoire d’une mouche volant autour d’une lampe,<br />
d’une feuille dans un tourbillon d’air.<br />
Sous certaines conditions de continuité des dérivées (que l’on<br />
supposera réalisées sans les préciser dans c<strong>et</strong> exposé), en tout<br />
point M d’une courbe gauche G, on définit les notions<br />
suivantes :<br />
- Tangente :<br />
Position limite d’une sécante MM’ lorsque M’ tend vers M le<br />
long de la courbe; c’est aussi la direction de la trajectoire que<br />
suivrait un mobile astreint à se déplacer sur la courbe gauche à<br />
l’instant où il se trouverait libéré de c<strong>et</strong>te astreinte (en supposant<br />
qu’il ne soit soumis à aucune force). On calcule le vecteur<br />
tangent T r<br />
en un point en dérivant le vecteur position par<br />
rapport à la variable définissant sa position.<br />
- Plan normal :<br />
Plan perpendiculaire en M à la tangente; par M <strong>et</strong> dans ce plan<br />
passent une infinité de “normales” à la courbe (toutes les droites<br />
perpendiculaires à la tangente).<br />
- Plan osculateur :<br />
Position limite, lorsque M’ tend vers M le long de la courbe, du<br />
plan formé par la tangente en M <strong>et</strong> le point M’. C’est en fait le<br />
plan qui contient “au mieux” la courbe au voisinage de M, il<br />
varie le long de la courbe. Pour une courbe plane, le plan<br />
osculateur est le plan de la courbe.<br />
- Normale principale :<br />
C’est l’intersection du plan normal <strong>et</strong> du plan osculateur; parmi<br />
toutes les normales en M, c’est celle qui est dans le plan<br />
osculateur. Notons N r un vecteur normal.<br />
- Binormale :<br />
C’est la perpendiculaire commune à la tangente <strong>et</strong> à la normale<br />
principale; elle est dans le plan normal <strong>et</strong> perpendiculaire au<br />
plan osculateur. Parmi toutes les normales, c’est celle qui est<br />
perpendiculaire au plan osculateur. Notons B r<br />
un vecteur<br />
binormal. Le produit vectoriel de T r <strong>et</strong> N r<br />
est un vecteur<br />
binormal ( B r =T r ∧ N r )<br />
- Plan rectifiant :<br />
C’est le plan contenant la tangente <strong>et</strong> la binormale; il est<br />
perpendiculaire au plan osculateur <strong>et</strong> au plan normal.
- Trièdre de Fren<strong>et</strong> :<br />
Trièdre tri-rectangle mobile formé par la tangente, la normale principale <strong>et</strong> la binormale.<br />
- Abscisse curviligne : s<br />
Fixons une origine O sur une courbe gauche ainsi qu’un sens de parcours. La mesure<br />
algébrique de la longueur de la courbe entre O <strong>et</strong> un point M de la courbe, définit<br />
l’abscisse curviligne notée s du point M. Il s’agit d’une généralisation de la notion<br />
d’abscisse sur une droite orientée.<br />
- Courbure : ρ<br />
La courbure d’une courbe gauche est égale à la courbure de sa projection (plane) sur le<br />
plan osculateur. La courbure d’une courbe plane mesure la limite du rapport de la<br />
variation de direction de la tangente à la variation de l’abscisse curviligne.<br />
2<br />
La courbure ρ est l’inverse du rayon de courbure R soit :<br />
1 dω<br />
ρ = = R ds<br />
dω<br />
ds<br />
angle de 2 tangentes infiniment voisines<br />
variation de l’abscisse curviligne entre 2 points infiniment voisins<br />
- Cercle osculateur :<br />
Cercle situé dans le plan osculateur <strong>et</strong> dont le rayon est égal au rayon de courbure. C’est<br />
le cercle qui « épouse » au mieux la projection de la courbe sur le plan osculateur en un<br />
point donné.<br />
- Torsion : τ<br />
La torsion d’une courbe gauche mesure la limite du rapport de la variation de direction<br />
du plan osculateur à la variation de longueur curviligne.<br />
1 dθ<br />
La torsion τ est l’inverse du rayon de torsion T soit : τ = = T ds<br />
dθ angle de 2 plans osculateurs infiniment rapprochés<br />
ds longueur curviligne entre 2 points infiniment voisins<br />
- Sphère osculatrice :<br />
C’est la sphère qui « épouse » au mieux la courbe en un point donné. C<strong>et</strong>te sphère<br />
contient le cercle osculateur mais n’a pas le même centre (à cause de la torsion).<br />
Eléments caractéristiques en un point P d’une courbe gauche. D’après, Hilbert <strong>et</strong> Cohn-Vossen.
- Définition analytique :<br />
On peut définir une courbe<br />
• Comme intersection de 2 <strong>surfaces</strong> (ce qui est le cas de la droite vue comme<br />
intersection de 2 plans). Chaque équation définit une surface par une relation<br />
entre les 3 coordonnées des points lui appartenant :<br />
⎧f<br />
(x, y,z) = 0<br />
⎨<br />
⎩g (x, y,z) = 0<br />
• Ou par 3 équations avec un paramètre (cf. représentation paramétrique de la<br />
droite). Le paramètre t peut être interprété comme la variable temps en<br />
cinématique où la courbe est l’ensemble des points M d’une trajectoire en<br />
fonction du temps.<br />
⎧x<br />
= f(t)<br />
⎪<br />
⎨y<br />
= g(t)<br />
⎪<br />
⎩z<br />
= h(t)<br />
3<br />
• Ou encore en coordonnées semi-polaires<br />
⎧ θ = θ<br />
⎪<br />
⎨ρ<br />
= f( θ ) Ou avec un paramètre<br />
⎪<br />
⎩z<br />
= g( θ )<br />
⎧θ<br />
= f( t)<br />
⎪<br />
⎨ρ<br />
= g( t)<br />
⎪<br />
⎩z<br />
= h( t)<br />
Dans le cas des formulations paramétriques en fonction de t, un vecteur tangent (non<br />
unitaire) en M se calcule en dérivant le vecteur OM par rapport au paramètre t :<br />
T = d OM / dt<br />
Un vecteur du plan osculateur (contenant T <strong>et</strong> N ) est : d 2 OM / dt 2<br />
On en déduit qu’un vecteur binormal (non unitaire) est :<br />
B = T ∧ d 2 OM / dt 2<br />
Puis qu’un vecteur normal (non unitaire) est :<br />
N = T ∧ B<br />
II – Surfaces <strong>gauches</strong><br />
Une surface gauche est un ensemble à deux dimensions de points de l’espace. Une<br />
surface qui n’est pas plane est dite “gauche”.<br />
Elle peut être définie par une propriété géométrique (ex: sphère comme ensemble des<br />
points situés à une distance donnée d’un point donné ou comme surface dont la normale<br />
en tout point passe par un point fixe) ou par une relation analytique entre les<br />
coordonnées d’un point :<br />
• z = f(x,y) (forme explicite) ou g(x,y,z)= 0 (forme implicite)<br />
⎧x<br />
= f(u,v)<br />
⎪<br />
• ou encore ⎨y<br />
= g(u, v) u <strong>et</strong> v étant 2 paramètres indépendants<br />
⎪<br />
⎩z<br />
= h(u, v)<br />
• en coordonnées semi-polaires :<br />
z = f(θ,ρ) θ <strong>et</strong> ρ angle polaire <strong>et</strong> rayon-vecteur (indépendants)
- Plan tangent en un point :<br />
Sous réserve de certaines conditions de continuité <strong>et</strong> de dérivation, on peut tracer sur une<br />
surface des courbes (planes ou non) passant par un point donné de c<strong>et</strong>te surface. En ce<br />
point, chaque courbe adm<strong>et</strong> une tangente <strong>et</strong> les tangentes aux différentes courbes sont<br />
toutes contenues dans un même plan appelé plan tangent à la surface au point considéré.<br />
- Normale :<br />
En tout point M d’une surface, la normale est la perpendiculaire au plan tangent donc la<br />
perpendiculaire commune aux tangentes aux différentes courbes passant par M <strong>et</strong> tracées<br />
sur la surface.<br />
4<br />
III – Cas particuliers de <strong>surfaces</strong><br />
Plan tangent <strong>et</strong> normale en un point M d’une surface.<br />
(D’après Alain Chassagnoux.)<br />
III.1 - Surfaces cylindriques<br />
Une surface cylindrique est engendrée par une droite (G) dite génératrice qui reste<br />
parallèle à une direction fixe δ <strong>et</strong> qui s’appuie sur une courbe D (dite directrice <strong>et</strong> qui<br />
n’est pas nécessairement plane). Le plan tangent est le même tout le long d’une<br />
génératrice.<br />
III.2 - Surfaces coniques<br />
Une surface conique est engendrée par une droite (G) dite génératrice qui passe par un<br />
point fixe S <strong>et</strong> qui s’appuie sur une courbe D (dite directrice <strong>et</strong> qui n’est pas<br />
nécessairement plane). Le plan tangent est le même tout le long d’une génératrice.<br />
III.3 - Surfaces de révolution<br />
(S) est une surface de révolution d’axe (D) si, pour tout point M de (S), le cercle d’axe<br />
(D) passant par M appartient entièrement à (S).<br />
Une surface de révolution peut être engendrée par la rotation autour de (D) de n’importe<br />
quelle ligne (plane ou gauche) tracée sur elle. C<strong>et</strong>te ligne peut être considérée comme<br />
une génératrice.<br />
Exemples de <strong>surfaces</strong> de révolution : sphère, tore, cône de révolution, cylindre de<br />
révolution, hyperboloïde de révolution.<br />
Tore : Un tore est obtenu par la rotation d’un cercle situé dans un plan contenant l’axe<br />
(D). Le centre du cercle ne doit pas passer par l’axe (Si le centre du cercle est sur l’axe<br />
on obtient une sphère). Le cercle peut couper l’axe.
5<br />
Tore d’axe Oz. D’après A. Gheorghiu <strong>et</strong> V. Dragomir.<br />
L’hyperboloïde de révolution à une nappe (HR) peut être engendré par une droite<br />
(génératrice) tournant autour d’un axe non coplanaire avec la droite (Si la droite était<br />
coplanaire avec l’axe de révolution on génèrerait un cône de révolution (droites sécantes)<br />
ou un cylindre de révolution (droites parallèles)). La section d’une surface de révolution<br />
par un plan méridien (passant par l’axe de rotation) est une courbe plane (méridienne).<br />
La section méridienne de l’HR est une hyperbole.<br />
C<strong>et</strong>te surface a la propriété d’être doublement réglée. Les deux systèmes de génératrices<br />
sont symétriques par rapport au plan contenant le cercle de gorge (cercle défini par les<br />
point les plus proches de l’axe). Le plan tangent en un point est perpendiculaire au plan<br />
méridien en ce point. Il contient une génératrice de chaque système.<br />
Hyperboloïde de révolution : Représentation de 16 génératrices obtenues par rotation autour de<br />
l’axe D=Oz (à gauche), représentation des méridiens hyperboliques, du deuxième système de<br />
génératrices <strong>et</strong> des cercles (à droite). D’après A. Gheorghiu <strong>et</strong> V. Dragomir.<br />
III.4 - Surfaces de translation<br />
Une surface de translation résulte de la translation d’une courbe, génératrice, dont un<br />
point s’appuie constamment sur une autre courbe, directrice. Les rôles des deux courbes<br />
peuvent être intervertis, la surface obtenue étant la même.<br />
Exemples de <strong>surfaces</strong> de translation. D’après A. Gheorghiu <strong>et</strong> V. Dragomir.
6<br />
III.5 - Surfaces réglées<br />
Géométriquement, une surface réglée est engendrée par une droite qui se déplace dans<br />
l’espace en s’appuyant sur trois courbes directrices, en général <strong>gauches</strong>.<br />
Pour comprendre comment construire point par point une surface réglée considérons<br />
dans un premier temps le cas particulier où les 3 directrices sont des droites :<br />
D’un point A de la première droite, on peut tracer toutes les droites qui s’appuient sur la<br />
seconde droite; on engendre ainsi un plan; en général, ce plan est coupé par la troisième<br />
droite en un point B; pour chaque point A, on obtient ainsi une droite (AB). L’ensemble<br />
de ces droites constitue la surface réglée.<br />
On peut généraliser ce raisonnement à 3 directrices <strong>gauches</strong> (C 1 , C 2 <strong>et</strong> C 3 ) en<br />
considérant pour un point A de C 1 la surface conique de somm<strong>et</strong> A s’appuyant sur la<br />
directrice C 2 . C<strong>et</strong>te surface peut alors couper C 3 en un certain nombre de points (B i )<br />
(peut-être aucun) définissant autant de génératrices (AB i ) de la surface réglée.<br />
Analytiquement, on définit une surface réglée en se donnant une courbe directrice sur<br />
laquelle s’appuient les génératrices <strong>et</strong> un vecteur variable donnant une direction pour<br />
chaque génératrice. Précisons que se donner la directrice revient à se donner une courbe,<br />
c’est-à-dire 3 fonctions d’un même paramètre u : x(u), y(u), z(u). Quant au vecteur, on se<br />
donne aussi ses 3 composantes en fonction du même paramètre u. A chaque valeur de u<br />
correspondent donc un point précis <strong>et</strong> une direction précise donc une génératrice<br />
parfaitement déterminée.<br />
III.5.1 - Plan tangent<br />
En tout point d’une génératrice, la surface réglée adm<strong>et</strong> un plan tangent qui contient c<strong>et</strong>te<br />
génératrice mais qui varie (exception faite des <strong>surfaces</strong> développables) suivant la<br />
position du point sur la génératrice. Lorsque le point s’éloigne à l’infini le long d’une<br />
génératrice, la position limite du plan tangent est appelée plan asymptote.<br />
III.5.2 - Plan central, point central<br />
Le point de la génératrice où le plan tangent à la surface réglée est perpendiculaire au<br />
plan asymptote est appelé point central de la génératrice. Le plan tangent en ce point est<br />
le plan central. L’ensemble des points centraux des différentes génératrices est appelé<br />
ligne de striction.<br />
III.5.3 - Cône directeur d’une surface réglée<br />
Soit u r le vecteur donnant la direction de la génératrice. Posons OH = u<br />
r . H décrit une<br />
courbe (C H ). Le cône de somm<strong>et</strong> O <strong>et</strong> de directrice (C H ) est engendré par les parallèles<br />
aux génératrices de la surface réglée. Le plan tangent à ce cône le long de OH donne la<br />
direction du plan asymptote relatif à la génératrice associée à OH.<br />
III.6 - Surfaces réglées particulières : Conoïdes <strong>et</strong> cylindroïdes<br />
Un conoïde est une surface réglée dont deux des directrices sont des droites <strong>et</strong> la<br />
troisième une courbe. Si l’une des droites est à l’infini, le conoïde est à plan directeur,<br />
l’autre droite est l’axe (ou l’arête) ; un conoïde à plan directeur peut être engendrée par<br />
une droite G assuj<strong>et</strong>tie à s’appuyer sur une droite A (axe ou arête du conoïde), à rester<br />
parallèle à un plan P (plan directeur) qui coupe A <strong>et</strong> à une autre condition (par exemple,<br />
la droite G s’appuie sur une courbe directrice donnée). Les droites G sont les<br />
génératrices du conoïde.
7<br />
Exemples de conoïdes à plan directeur. D’après A. Gheorghiu <strong>et</strong> V. Dragomir.<br />
- L’hyperboloïde réglé général a trois directrices droites à distance finie non<br />
coplanaires deux à deux (la courbe est dégénérée en droite).<br />
- Le paraboloïde hyperbolique (PH) a deux directrices droites non coplanaires à<br />
distance finie <strong>et</strong> une directrice droite à 1’infini (définissant un plan directeur).<br />
Paraboloïde hyperbolique : Représentation des deux directrices droites (AD) <strong>et</strong> (BC) <strong>et</strong> des<br />
génératrices obtenues par intersection avec des plans parallèles au plan directeur (à gauche),<br />
représentation des paraboles, <strong>et</strong> du deuxième système de génératrices (à droite). D’après A.<br />
Gheorghiu <strong>et</strong> V. Dragomir.<br />
Le paraboloïde hyperbolique possède deux propriétés particulières :<br />
- Il est doublement réglé. Avec les notations de la figure ci-dessus (à gauche) un premier<br />
système de génératrices est défini en considérant les directrices (AD) <strong>et</strong> (BC) le plan<br />
directeur est parallèle aux droites (AB) <strong>et</strong> (DC). Un deuxième système de génératrices<br />
peut être défini en inversant les rôles <strong>et</strong> en considérant donc les directrices (AB) <strong>et</strong> (DC),<br />
le plan directeur est parallèle aux droites (AD) <strong>et</strong> (BC).<br />
- On peut prouver analytiquement que le paraboloïde hyperbolique est aussi une surface<br />
de translation d’une parabole sur une autre parabole (Voir figure ci-après).
8<br />
Paraboloïde hyperbolique : représentation des paraboles définissant c<strong>et</strong>te surface de translation<br />
(à gauche) d’après A. Gheorghiu <strong>et</strong> V. Dragomir. Application dans architecturale (à droite)<br />
pour la couverture du laboratoire d’étude des rayons cosmiques, Université de Mexico, 1951.<br />
Architectes : Jorge Gonzales Reyna, Felix Candela.<br />
Un cylindroïde est une surface réglée dont deux des directrices sont des courbes <strong>et</strong> la<br />
troisième une droite (axe du cylindroïde). Si la droite directrice est à l’infini, le<br />
cylindroïde devient à plan directeur.<br />
C<strong>et</strong>te classification est inclusive, c’est-à-dire que les conoïdes sont des cas particuliers de<br />
cylindroïdes.<br />
Exemples de cylindroïdes s’appuyant sur deux courbes (sinusoïde <strong>et</strong> ellipse) <strong>et</strong> une droite :1) à<br />
distance finie parallèle à OY <strong>et</strong> passant par ω (à gauche) <strong>et</strong> 2) à plan directeur parallèle à OXZ<br />
(à droite) quand ω est à l’infini sur OZ. D’après A. Gheorghiu <strong>et</strong> V. Dragomir.<br />
Exemple de cylindroïde s’appuyant sur deux arcs de cercles <strong>et</strong> une droite à distance finie (à<br />
gauche) d’après A. Gheorghiu <strong>et</strong> V. Dragomir. Application à l’arrière voussure de Marseille<br />
(à droite), d’après J.-L. Gauthier
9<br />
III.7 - Surfaces développables<br />
Une surface développable est une surface réglée qui adm<strong>et</strong> le même plan tangent le long<br />
d’une génératrice, <strong>et</strong> ceci pour chaque génératrice. C’est l’enveloppe géométrique d’une<br />
famille de plans dépendant d’un paramètre. Elle peut être appliquée sur un plan sans<br />
déchirure ni repli.<br />
Les cônes <strong>et</strong> cylindres sont des <strong>surfaces</strong> développables. Les <strong>surfaces</strong> d’égale pente le<br />
sont aussi : les génératrices sont les lignes de plus grande pente (exemple : surface de tas<br />
de matériau granulaires pulvérulents comme le sable ou les poudres secs).<br />
Les tangentes à une courbe gauche fixe engendrent en général une surface développable<br />
La courbe de départ est appelée arête de rebroussement de la surface développable (on<br />
parle alors de surface tangentale).<br />
La figure ci-dessous donne un exemple de surface tangentale construite sur une hélice.<br />
Hélicoïde développable représenté par l’hélice <strong>et</strong> ses tangentes (à gauche) <strong>et</strong> son application à<br />
l’escalier du Louvre (à droite).<br />
IV – Contour apparent<br />
IV.1 Contour apparent d’une surface (S) vue d’un point Mo<br />
On appelle contour apparent de (S) vue du point Mo l’ensemble des points de (S) où<br />
peuvent venir se confondre 2 des points communs à (S) <strong>et</strong> à une droite variable issue de<br />
Mo.<br />
IV.2 Contour apparent en perspective (parallèle ou centrale) sur le plan H de la<br />
surface (S) vue du point Mo<br />
C’est la perspective sur le plan H du contour apparent de (S) vue du point Mo (l’oeil est<br />
en le tableau est le plan H).
10<br />
V – Courbure d’une surface<br />
Soit une surface (S), un point M de (S), <strong>et</strong> la normale N M à (S) en M. Soit P un plan<br />
tournant autour de la normale. Il coupe (S) suivant une courbe (C).<br />
On montre que lorsque P tourne autour de N M , le rayon de courbure de (C) varie entre 2<br />
valeurs extrêmes appelées rayons de courbure principaux de (S) en M, R 1 <strong>et</strong> R 2 . Les<br />
1<br />
valeurs correspondantes de la courbure sont K 1 =<br />
R <strong>et</strong> K 1<br />
2=<br />
1<br />
R2<br />
Les plans correspondants sont dits plans principaux <strong>et</strong> sont perpendiculaires.<br />
Les deux directions principales de courbure de la surface au point M <strong>et</strong> les cercles osculateurs<br />
correspondants. R 1 = O 1 M, R 2 = O 2 M. Figure d’après Alain Chassagnoux.<br />
Si en un point les rayons de courbure principaux sont de signes contraires, la surface<br />
adm<strong>et</strong> en ce point 2 sections normales (c’est-à-dire contenant la normale) à rayon de<br />
courbure infini c’est-à-dire 2 courbes adm<strong>et</strong>tant en M un point d’inflexion ou<br />
exceptionnellement 2 droites.<br />
La courbure représente l’inverse du rayon de courbure orienté (par rapport à la normale).<br />
On définit :<br />
K 1 + K 2<br />
- La courbure moyenne : c’est la moyenne des courbures principales C =<br />
2<br />
Les <strong>surfaces</strong> dont la courbure moyenne est nulle en chaque point sont appelées <strong>surfaces</strong><br />
minimales. Ce sont les <strong>surfaces</strong> d’aire minimales reliant les points d’une courbe gauche<br />
quelconque de l’espace.<br />
L’hélicoïde droit à plan directeur est la seule surface gauche réglée minimale.<br />
Les <strong>surfaces</strong> minimales peuvent être formées par des films d’eau savonneuse sur contour<br />
fermé. En architecture, elles peuvent servir à définir la géométrie de structures tendues.<br />
(Robert le Ricolais, Frei Otto).<br />
Exemples de <strong>surfaces</strong> minimales formées par des films d’eau savonneuse. A gauche, hélicoïde<br />
droit à plan directeur, au centre, caténoïde. D’après, Hilbert <strong>et</strong> Cohn-Vossen (p210).<br />
Application aux structures tendues de Frei OTTO (à droite)
11<br />
K= K 1 .K<br />
- La courbure gaussienne, dite aussi courbure totale : 2<br />
C’est le produit des courbures principales.<br />
La notion de courbure totale perm<strong>et</strong> de décrire le comportement local de la surface en un<br />
point M en fonction du signe de K.<br />
Point elliptique : K>0 Point parabolique : K=0 Point hyperbolique : K
Surfaces à courbure totale nulle : L’une des courbures principales au moins est<br />
nulle; elles sont réglées <strong>et</strong> développables (tous cônes <strong>et</strong> cylindres, tangentales).<br />
12<br />
Les cylindres (à gauche) <strong>et</strong> les cônes (à droite) sont des <strong>surfaces</strong> à points paraboliques.<br />
Figure d’après Alain Chassagnoux.<br />
Surfaces à courbure totale positive : Elles sont à double courbure de même sens :<br />
sphères, ellipsoïdes, <strong>surfaces</strong> de révolution à méridien convexe. Elles ne peuvent être ni<br />
réglées ni développables.<br />
Certaines <strong>surfaces</strong> peuvent être d’un type hybride <strong>et</strong> changer de signe pour leur courbure<br />
totale suivant les zones. Par exemple, <strong>surfaces</strong> de révolution dont le méridien possède un<br />
point d’inflexion.<br />
VI – Classement de quelques types de <strong>surfaces</strong><br />
Le tableau récapitulatif ci-dessous fait un classement des <strong>surfaces</strong> présentées en fonction<br />
leurs modes de génération (réglées, de révolution) <strong>et</strong> propriétés (minimales,<br />
développables, courbure totales négative).<br />
Réglées<br />
Développables<br />
(K=0)<br />
De révolution<br />
Minimales<br />
(C=0)<br />
à K
13<br />
VII – Lignes remarquables d’une surface<br />
VII.1 - Lignes de niveau<br />
<strong>Courbes</strong> planes parallèles à un plan de référence.<br />
Exemple : plan de référence horizontal (en cartographie) : z = cte<br />
VII.2 - Lignes de plus grande pente<br />
Trajectoires orthogonales des lignes de niveau, c’est-à-dire toute courbe qui en chacun<br />
de ses points est orthogonale à la ligne de niveau passant par ce point.<br />
VII.3 - Lignes isoparamétriques<br />
Famille de courbes u = cte <strong>et</strong> v = cte<br />
VII.4 - Lignes asymtotiques<br />
Lignes qui adm<strong>et</strong>tent en tout point un plan osculateur qui est le plan tangent à la surface.<br />
VII.5 - Lignes de courbure<br />
Lignes le long desquelles les normales à la surface engendrent une surface développable.<br />
En tout point passent 2 lignes de courbure orthogonales dont les tangentes sont<br />
conjuguées harmoniques par rapport aux tangentes aux lignes asymptotiques.<br />
VII.6 - Lignes géodésiques<br />
Lignes adm<strong>et</strong>tant en chaque point un plan osculateur normal à la surface. Elles<br />
représentent le plus court chemin sur la surface pour aller d’un point à un autre.<br />
VIII – Repères bibliographiques<br />
Ce cours a été rédigé initialement par François Plaut. Il a été complété par Thierry<br />
Ciblac. Les illustrations sont tirées principalement de l’ouvrage de Gheorghiu <strong>et</strong><br />
Dragomir <strong>et</strong> du cours d’Alain Chassagnoux de l’ENSA de Nantes.<br />
LARGER J.C. Théorie des coques : application au calcul des résilles p. 10 à 20 in<br />
Introduction au calcul des structures en résilles, CSFTA, édition Brémo Boulogne 1978<br />
Contient une définition rigoureuse des notions de courbure normale, courbure<br />
géodésique, torsion géodésique.<br />
BOURGUIGNON J.P, LAWSON H.B, MARGERIN C., Les <strong>surfaces</strong> minimales p.29 à<br />
39 in Les Mathématiques aujourd’hui édition Pour la Science, Belin<br />
Illustration des notions de courbure moyenne <strong>et</strong> totale<br />
LELONG-FERRAND J., ARNAUDIES J.M. Cours de mathématiques Tome 3,<br />
Géométrie <strong>et</strong> cinématique, édition Dunod Université, Paris 1979.<br />
Etude théorique très complète des notions de courbure, de torsion, de directions<br />
principales avec démonstrations à partir des concepts de l’algèbre linéaire.<br />
GHEORGHIU A. & DRAGOMIR V., La représentation des structures constructives,<br />
1968, Paris, Eyrolles.<br />
Etude théorique <strong>et</strong> classification des <strong>surfaces</strong> suivant leur courbure totale en relation<br />
avec le domaine de l’architecture.
CHASSAGNOUX A., Cours de géométrie constructive, <strong>Ecole</strong> <strong>Nationale</strong> d’Architecture<br />
de Nantes, 2002.<br />
HILBERT D. & COHN-VOSSEN S., Geom<strong>et</strong>ry and the imagination, Chelsea publishing<br />
company, New York, 1952.<br />
Ouvrage de mathématicien de référence.<br />
MIMRAM M., Structure <strong>et</strong> formes. Etude appliquée à l’oeuvre de Robert le Ricolais.<br />
Dunod. Presses des Ponts <strong>et</strong> Chaussées, 1983.<br />
PETIT J.-P., « Le géométricon » <strong>et</strong> le « topologicon » dans la série « Les aventures<br />
d’Anselme Lanturlu. »<br />
Bandes dessinées de vulgarisation.<br />
Téléchargeables gratuitement :<br />
http://www.savoir-sans-frontieres.com/JPP/telechargeables/free_downloads.htm<br />
14<br />
IX – Intern<strong>et</strong><br />
http://www.mathcurve.com/<br />
Site en français dédié aux formes mathématiques (notamment aux courbes <strong>et</strong> <strong>surfaces</strong>).<br />
On y trouvera de nombreux cas définis, étudiés <strong>et</strong> illustrés notamment par des exemples<br />
architecturaux. Ce site renvoie à de nombreux autres liens dédiés aux formes.