

Analyse des deux méthodes de Broyden - Patrick Roux.pdf - CQFD
Analyse des deux méthodes de Broyden - Patrick Roux.pdf - CQFD
Analyse des deux méthodes de Broyden - Patrick Roux.pdf - CQFD

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
IntroductionLes métho<strong><strong>de</strong>s</strong> <strong>de</strong> Broy<strong>de</strong>n sont <strong><strong>de</strong>ux</strong> algorithmes permettant <strong>de</strong> résoudre unsystème <strong>de</strong> n équations non-linéaires données par une fonction F : R n −→ R n .Or, il se trouve que dans la littérature traitant le sujet, une <strong>de</strong> ces métho<strong><strong>de</strong>s</strong>est systématiquement appelée la “bonne” métho<strong>de</strong> <strong>de</strong> Broy<strong>de</strong>n et l’autre la“mauvaise”. Toutefois, il n’a jamais été démontré que la “bonne” métho<strong>de</strong>fonctionne réellement mieux que la “mauvaise”.Le but <strong>de</strong> ce rapport est donc <strong>de</strong> répondre aux questions suivantes :– La “bonne” métho<strong>de</strong> fonctionne-t-elle toujours mieux que la “mauvaise”?– Si c’est le cas, pourquoi ?– Si ce n’est pas le cas, dans quelles situations la “mauvaise” est-elle plusperformante que la “bonne”?De par la similarité <strong><strong>de</strong>s</strong> <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong>, il semble curieux qu’une d’elles fonctionnetoujours mieux que l’autre. Les tests réalisés auparavant étaient peutêtretoujours mieux adaptés à la “bonne” métho<strong>de</strong> ...C’est cette situation un peu confuse que je vais tenter <strong>de</strong> clarifier dans cerapport.1
Métho<strong><strong>de</strong>s</strong> <strong>de</strong> Broy<strong>de</strong>nPour commencer, décrivons ces métho<strong><strong>de</strong>s</strong>.Comme décrit dans l’introduction, les métho<strong><strong>de</strong>s</strong> <strong>de</strong> Broy<strong>de</strong>n résolvent le systèmed’équations non-linéaires suivant :F (x) = 0 , où F : R n −→ R nEn fait, ce sont <strong><strong>de</strong>s</strong> métho<strong><strong>de</strong>s</strong> <strong>de</strong> type quasi-Newton, c’est-à-dire dérivées <strong>de</strong>la métho<strong>de</strong> Newton.Métho<strong>de</strong> <strong>de</strong> NewtonLa métho<strong>de</strong> <strong>de</strong> Newton a exactement le même but que les métho<strong><strong>de</strong>s</strong> <strong>de</strong>Broy<strong>de</strong>n.Le développement <strong>de</strong> la fonction F en série <strong>de</strong> Taylor d’ordre 1 en un pointx k ∈ R n fournit un modèle linéaire <strong>de</strong> F autour <strong>de</strong> x k :En approximant F <strong>de</strong> la sorte :F (x) = F (x k ) + F ′ (x k )(x − x k ) (1)F (x) = 0 ⇔ F (x k ) + F ′ (x k )(x − x k ) = 0⇔ F ′ (x k )(x − x k ) = −F (x k )⇔ x − x k = −(F ′ (x k )) −1 F (x k )⇔ x = x k − (F ′ (x k )) −1 F (x k )En posant x k+1 = x, on obtient une nouvelle approximation du zéro <strong>de</strong> F , etdu même coup la récurrence suivante :x k+1 = x k − (F ′ (x k )) −1 F (x k )3
Or : (3) B k+1 − B k = ds T k⇒ B k+1 = B k + ds T k= B k + y k−B k s ks T s T k s k k= B k + (y k − B k s k ) sT ks T k s kC’est la relation récurrente pour B, l’approximation du jacobien.En fait, comme cité dans [2], cette mise à jour <strong>de</strong> Broy<strong>de</strong>n représente le changementminimal par rapport à B k compte tenu du fait que B k s k = y k , si lechangement est mesuré avec la norme <strong>de</strong> Frobenius.La preuve <strong>de</strong> ceci se trouve en [2], lemme 8.1.1 p 171.L’algorithme <strong>de</strong> la première métho<strong>de</strong> <strong>de</strong> Broy<strong>de</strong>n est alors le suivant :Algorithme BGM (Broy<strong>de</strong>n good method) :– donné :– fonction F : R n −→ R n– point initial x 1 ∈ R n– matrice initiale B 1 ∈ M n (R)– pour k <strong>de</strong> 1 à ... :– résoudre B k s k = −F (x k ) en fonction <strong>de</strong> s k– x k+1 = x k + s k– y k+1 = F (x k+1 ) − F (x k )– B k+1 = B k + (y k − B k s k ) sT ks T k s kReste à définir un critère d’arrêt, qui sera décrit dans le chapitre “Programme<strong>de</strong> tests”.Secon<strong>de</strong> métho<strong>de</strong> <strong>de</strong> Broy<strong>de</strong>nReprenons l’équation (2) :y k = B k+1 s k⇔ B −1k+1 y k = s kBroy<strong>de</strong>n considère alors cette fois l’approximation linéaire N suivante :N k (x) = x k + B −1k(F (x) − F (x k))7
On remarque que :a) N k (x k ) = x k + B −1k (F (x k) − F (x k ))= x kb) N k (x k+1 ) = x k + B −1k (F (x k+1) − F (x k ))= x k+1Le calcul <strong>de</strong> la différence entre <strong><strong>de</strong>ux</strong> modèles successifs N k+1 − N k est tout àfait similaire à celui <strong>de</strong> M k+1 − M k :N k+1 (x) − N k (x) = · · ·= (B −1k+1 − B−1 k)(F (x) − F (x k))Comme pour la première métho<strong>de</strong>, on peut trouver λ ∈ R et c ∈ R n avecyk T c = 0 tels que :F (x) − F (x k ) = λ(F (x k+1 ) − F (x k )) + c= λy k + cAinsi :N k+1 (x) − N k (x) = · · ·= λ(s k − B −1ky k) + (B −1k+1 − B−1 k )cA nouveau, pour minimiser la norme <strong>de</strong> cette différence, il faut rendre lesecond terme nul, puisque le premier est déjà déterminé au k e pas. Le raisonnementest alors exactement le même que pour la première métho<strong>de</strong>.Finalement, la relation pour B −1k+1est la suivante :B −1k+1 = B−1 k+ (s k − B −1ky k) yT kyk T y kLe cheminement est donc exactement le même que pour la première métho<strong>de</strong>,sauf que les modèles M et N diffèrent : le premier s’inspire <strong>de</strong> la relationy k = B k+1 s k et le second <strong>de</strong> s k = B −1k+1 y k.Voici maintenant l’algorithme <strong>de</strong> la secon<strong>de</strong> métho<strong>de</strong> :Algorithme BBM (Broy<strong>de</strong>n bad method) :– donné :8
– fonction F : R n −→ R n– point initial x 1 ∈ R n– matrice initiale B1 −1 ∈ M n (R)– pour k <strong>de</strong> 1 à ... :– s k = −B −1k F (x k)– x k+1 = x k + s k– y k+1 = F (x k+1 ) − F (x k )– B −1k+1 = B−1 k+ (s k − B −1ky k) yT kyk T y kTout ce raisonnement est tiré <strong>de</strong> [2].Il existe une variante <strong>de</strong> chacun <strong><strong>de</strong>s</strong> <strong><strong>de</strong>ux</strong> algorithmes présentés précé<strong>de</strong>mment.On peut, dans l’algorithme BGM, calculer directement l’inverse <strong>de</strong> la matriceB k+1 pour ne pas <strong>de</strong>voir résoudre <strong>de</strong> système linéaire.Inversément, une variante <strong>de</strong> l’algorithme BBM consiste à calculer B k+1 puisrésoudre un système linéaire.Voici comment les relations récurrentes sont obtenues :BGM : B k+1 = B k + (y k − B k s k ) sT ks T k s kOn applique alors le lemme <strong>de</strong> Sherman-Morrison-Woodbury (voir [2] p 188)où : A = B k , u = y k − B k s k , v = s k :B −1k+1= B −1k−1= B −1= B −1k−1= B −1ks T k s k+s T k B−1 k y k−s T k s k(y k−B k s k ) B−1 k(y k − B k s k )s T k B−1 ks T k s k+s T k B−1 k1k− (B −1s T k s k+s T k B−1 k y k−s T k B−1 k B ks kk(B −1k+ (s k − B −1ky k) sT k B−1 ks T k B−1 k y kOn obtient donc l’algorithme suivant :y k − B −1ky k − s k )s T k B−1 kAlgorithme BGM bis (variante <strong>de</strong> BGM) :– donné :– fonction F : R n −→ R n– point initial x 1 ∈ R n 9B ks k )s T k B−1 k
– matrice initiale B1 −1 ∈ M n (R)– pour k <strong>de</strong> 1 à ... :– s k = −B −1k F (x k)– x k+1 = x k + s k– y k+1 = F (x k+1 ) − F (x k )– B −1k+1 = B−1 k+ (s k − B −1ky k) sT k B−1 ks T k B−1 k y kAppliquant, comme auparavant, le lemme <strong>de</strong> Sherman-Morrison-Woodbury àla relation récurrente <strong>de</strong> l’algorithme BBM, on trouve l’expression suivante :Ainsi :B k+1 = B k + (y k − B k s k ) yT k B ky T k B ks kAlgorithme BBM bis (variante <strong>de</strong> BBM) :– donné :– fonction F : R n −→ R n– point initial x 1 ∈ R n– matrice initiale B 1 ∈ M n (R)– pour k <strong>de</strong> 1 à ... :– résoudre B k s k = −F (x k ) en fonction <strong>de</strong> s k– x k+1 = x k + s k– y k+1 = F (x k+1 ) − F (x k )– B k+1 = B k + (y k − B k s k ) yT k B ky T k B ks kRésuméVoici donc les quatre relations récurrentes pour les matrices B k+1 ou B −1k+1 :BGMB k+1 = B k + (y k − B k s k ) sT ks T k s kBBM bisB k+1 = B k + (y k − B k s k ) yT k B ky T k B ks kB −1k+1 = B−1 kBGM bis+ (s k − B −1ky k) sT k B−1 ks T k B−1 k y kB −1k+1 = B−1 kBBM+ (s k − B −1ky k) yT kyk T y k10
Les <strong><strong>de</strong>ux</strong> mises à jour <strong>de</strong> B k+1 sont similaires, <strong>de</strong> même que celles <strong>de</strong> B −1k+1 .La seule différence rési<strong>de</strong> dans le terme fractionnel <strong>de</strong> droite.Un problème peut toutefois apparaître dans l’algorithme BBM ; en effet, lorsqu’ilse rapproche du ˜x tel que F (˜x) = 0, y T y = ‖y‖ 2 <strong>de</strong>vient très petit, et<strong>de</strong> ce fait B −1k+1peut prendre <strong><strong>de</strong>s</strong> valeurs aberrantes, puisque sa mise à joureffectue une division par un nombre qui tend vers 0.Par contre, ce problème n’apparaît pas dans l’algorithme BGM.C’est peut-être une première explication du fait que la secon<strong>de</strong> métho<strong>de</strong> estusuellement qualifiée <strong>de</strong> “mauvaise”.11
Origine <strong><strong>de</strong>s</strong> termes “bonne” et“mauvaise” métho<strong><strong>de</strong>s</strong>Comme cité en introduction, une <strong><strong>de</strong>s</strong> <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> est systématiquementnommée la “bonne” métho<strong>de</strong> <strong>de</strong> Broy<strong>de</strong>n et l’autre la “mauvaise”. L’origine<strong>de</strong> ces termes reste toutefois très mystérieuse.Dans son premier article traitant le sujet (voir [1]) et datant <strong>de</strong> 1965, Broy<strong>de</strong>nprésente les <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> en les nommant “method 1” et “method 2”.Voici ce qu’il dit au sujet <strong>de</strong> la secon<strong>de</strong> métho<strong>de</strong> :This method appears in practice to be unsatisfactory, it will be discussed nofurther at this stage.[. . . ]While the program was being <strong>de</strong>veloped, it became increasingly apparent thatmethod 2 was quite useless.In every case I tried it rapidly reached a state where successive step vectorss i and s i+1 were i<strong>de</strong>ntical and further progress thus became impossible, andfor this reason it is omitted from the following case histories.Broy<strong>de</strong>n n’effectue donc aucun test sur cette métho<strong>de</strong> ; c’est probablement <strong>de</strong>là que sont issus les termes. Je n’ai malheureusement pas réussi à retrouverles articles suivants <strong>de</strong> Broy<strong>de</strong>n.La question <strong>de</strong> cette origine a été posée à J.M. Martinez par mail, et voici cequ’il a répondu :In the original paper by Broy<strong>de</strong>n both methods were presented without the<strong>de</strong>nomination ”good” and ”bad”. They have been known also as ”first” and”second” methods of Broy<strong>de</strong>n respectively.Numerical experiments in the first years after their introduction suggested13
that the ”good” method was far better than the ”bad” method. After that, manyauthors began to call them ”good” and ”bad”.In fact, I do not know exactly whow was the first to publish those names,although I am sure that they were called in that way informally in meetingsand congresses.14
Conjectures <strong>de</strong> J.M. MartinezJ.M. Martinez est un mathématicien brésilien qui a publié plusieurs articlesconcernant les métho<strong><strong>de</strong>s</strong> <strong>de</strong> type quasi-Newton et celles <strong>de</strong> Broy<strong>de</strong>n, tels que[4], [5], [6] et [7].Dans un article datant <strong>de</strong> 2000 (voir [3]), il pose <strong><strong>de</strong>ux</strong> conjectures, censées déterminerdans quels cas la première métho<strong>de</strong> fonctionne mieux que la secon<strong>de</strong>.Première conjectureJ.M. Martinez considère le terme B −1k+1 y k−1 − s k−1 dans les <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> :BGM bis : B −1k+1 y k−1 − s k−1 = (B −1k= B −1k= (s k − B −1kBBM : B −1k+1 y k−1 − s k−1 = (B −1k= B −1k+ (s k − B −1ky k−1 + (s k − B −1ky k) sT k s k−1s T k B−1 k y k+ (s k − B −1ky k) sT k B−1 ks T k B−1 k y ky k) sT k B−1 k y k−1s T k B−1 k y k)y k−1 − s k−1− s k−1y k) yT ky T k y k )y k−1 − s k−1y k−1 + (s k − B −1ky k) yT ky yk T y k−1 − s k−1k= (s k − B −1ky k) yT k y k−1yk T y kIl remarque alors que B −1k+1 y k−1 −s k−1 , qu’il appelle “erreur sécante”, est dansles <strong><strong>de</strong>ux</strong> cas un multiple <strong>de</strong> s k − B −1k y k.Selon lui, plus l’erreur séquante est faible, mieux les métho<strong><strong>de</strong>s</strong> <strong>de</strong> Broy<strong>de</strong>nfonctionnent. Il postule donc que BGM sera plus efficace que BBM si :s T k s k−1∣s T k B−1 ky k∣ ∣∣∣ ∣ < yk T y k−1yk T y ∣ (4)k15
Secon<strong>de</strong> conjecture <strong>de</strong> MartinezJ.M Martinez obtient une <strong><strong>de</strong>ux</strong>ième conjecture en faisant la même comparaisonsur le terme B k+1 s k−1 − y k−1 .BGM : B k+1 s k−1 − y k−1 = (B k + (y k − B k s k ) sT ks T k s k )s k−1 − y k−1= B k s k−1 + (y k − B k s k ) sT ks T k s k s k−1 − y k−1= (y k − B k s k ) sT k s k−1s T k s kBBM bis : B k+1 s k−1 − y k−1 = (B k + (y k − B k s k ) yT k B ky T k B ks k)s k−1 − y k−1= B k s k−1 + (y k − B k s k ) yT k B ks k−1yk T B ks k= (y k − B k s k ) yT k y k−1yk T B ks k− y k−1A nouveau, B k+1 s k−1 − y k−1 est dans les <strong><strong>de</strong>ux</strong> cas le multiple d’un mêmeterme, en l’occurence y k −B k s k . Il postule donc que BGM fonctionnera mieuxque BBM si :s T k s ∣k−1∣∣∣∣ s T k s ∣ < yk T y ∣k−1 ∣∣∣k yk T B (5)ks kDans [3], J.M. Martinez créé un algorithme qui choisit à chaque pas quelalgorithme il utilise en fonction <strong>de</strong> (4) et (5). Cet algorithme s’est, selon sesdires, révélé plus efficace que BGM et BBM.Pour ma part, ces conjectures ne me semblent pas très significatives. Il n’esten effet pas évi<strong>de</strong>nt que la taille <strong>de</strong> l’erreur séquante est seule responsable dubon fonctionnement <strong>de</strong> l’une ou l’autre métho<strong>de</strong>.Une analyse géométrique <strong>de</strong> ces <strong><strong>de</strong>ux</strong> conjectures a été réalisée, mais elle n’apas été concluante, c’est-à-dire que les termes <strong><strong>de</strong>s</strong> conjectures ne représententrien <strong>de</strong> vraiment particulier.16
Programme <strong>de</strong> testsPour tester les <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> <strong>de</strong> Broy<strong>de</strong>n, j’ai implémenté un programmesur Matlab dont voici le <strong><strong>de</strong>s</strong>criptif :Le programme principal, nommé main, spécifie :la fonction F à tester :La liste <strong><strong>de</strong>s</strong> fonctions testées se trouve en annexe 1.le point initial x1 :La plupart du temps, le point initial est donné dans la définition <strong>de</strong> la fonction.Si ce n’est pas le cas, il faut essayer <strong>de</strong> le fixer ”assez proche” du zéro<strong>de</strong> la fonction, pour que l’algorithme ne diverge pas.la matrice initiale B 1 :La matrice initiale a été choisie comme étant l’i<strong>de</strong>ntité.le premier critère d’arrêt :Le critère d’arrêt choisi a été la norme <strong>de</strong> F . Cela semble en effet légitime, carle but est <strong>de</strong> trouver x tel que F (x) = 0, et <strong>de</strong> plus F (x) = 0 ⇐⇒ ‖F (x)‖ = 0.L’algorithme s’arrête donc lorsque la norme <strong>de</strong> F (x) est inférieure à 10 −6(comme Broy<strong>de</strong>n dans [1]).le second critère d’arrêt :Pour prévenir les cas <strong>de</strong> divergence, l’algorithme stoppe après 500 itérations.Avec ces données, main lance les algorithmes bgm et bbm, qui fonctionnentcomme décrit au chapitre “Métho<strong><strong>de</strong>s</strong> <strong>de</strong> Broy<strong>de</strong>n” avec les <strong><strong>de</strong>ux</strong> critères d’arrêtdéfinis précé<strong>de</strong>mment, et qui calculent <strong>de</strong> plus les termes <strong><strong>de</strong>s</strong> conjectures17
<strong>de</strong> Martinez.main lance aussi les algorithmes bgm bis et bbm bis, qui fonctionnent commebgm et bbm, mais utilisent respectivement la mise à jour <strong>de</strong> B −1ket B k .Les différents résultats que peut retourner le programme main sont les suivants:a) Pour les algorithmes bgm et bbm, la suite <strong><strong>de</strong>s</strong> x i , F (x i ) et ‖F (x i )‖.b) Les valeurs successives <strong><strong>de</strong>s</strong> termes <strong><strong>de</strong>s</strong> <strong><strong>de</strong>ux</strong> conjectures <strong>de</strong> Martinez.c) Une synthèse comprenant :– le nom <strong>de</strong> la fonction– le point initial– la matrice initiale– le nombre d’itérations nécessaires à bgm et à bbm– les zéros trouvés dans les <strong><strong>de</strong>ux</strong> cas– les nombres d’itérations et les zéros déterminés par bgm bis et bbm bis,dans le cas où ces <strong>de</strong>rniers ont mieux fonctionné que bgm et bbm respectivement.d) Dans le cas d’une fonction <strong>de</strong> dimension 2, les graphes <strong><strong>de</strong>s</strong> x i et F (x i )successifs dans le plan pour bgm et bbm.18
Fonctions linéairesEtudions pour commencer les <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> sur <strong><strong>de</strong>s</strong> fonctions linéaires.Voici les relations récurrentes pour les matrices :BGM : B k+1 = B k + (y k − B k s k ) sT ks T k s k(6)BBM : B −1k+1 = B−1 k+ (s k − B −1ky k) yT kyk T y k(7)On remarque que si on échange les termes y k et s k dans (6), on obtient (7),à ceci près que l’on a <strong><strong>de</strong>s</strong> B −1 à la place <strong><strong>de</strong>s</strong> B.La première idée a donc été que BBM est en quelque sorte le “symétrique”<strong>de</strong> BGM, c’est-à-dire que BGM “travaille” sur les x k et BBM sur les F (x k ).Si c’est le cas, la résolution du système F −1 (x) = 0 <strong>de</strong>vrait être similaire àcelle <strong>de</strong> F (x) = 0. C’est ceci qui est développé par la suite :Soit donc F (x) = Ax une fonction linéaire.Prenons un point initial x 1 et une matrice initiale B 1 .Pour la fonction inverse F −1 (x) = A −1 x, il semble logique <strong>de</strong> prendre commepoint initial F (x 1 ) = Ax 1 .Quant à la matrice initiale, <strong>de</strong> manière similaire au point initial, il semble raisonnable<strong>de</strong> prendre A · B 1 , c’est-à-dire l’équivalent <strong>de</strong> B 1 du côté <strong>de</strong> l’image<strong>de</strong> F .J’ai testé cette théorie en dimension 2, en explicitant les calculs pendant uneou <strong><strong>de</strong>ux</strong> étapes, avec les paramètres suivants :19
( 1 −2F (x) =1 3)( 1x , x 1 =1), B 1 =( 1 00 1Les calculs pour les <strong><strong>de</strong>ux</strong> algorithmes se trouvent en annexe 2.Toutefois, en faisant les mêmes calculs pour F −1 , (cf annexe 3), on ne constatehélas aucune similarité entre les <strong><strong>de</strong>ux</strong> développements.Les mêmes calculs ont été effectués en prenant les mêmes point ou matriceinitiaux pour F et F −1 , mais cela n’a rien amené <strong>de</strong> plus.Il semble donc que l’hypothèse <strong>de</strong> “symétrie” entre BGM et BBM est erronée.En étudiant plus attentivement les relations récurrentes pour B −1k+1cas F (x) = Ax :)dans leF (x k ) = Ax k et F (x k+1 ) = Ax k+1⇒ y k = F (x k+1 ) − F (x k )= Ax k+1 − Ax k= A(x k+1 − x k )= As kBGM bis :BBM :B −1k+1= B −1k= B −1kB −1k+1= B −1k= B −1k= B −1k+ (s k − B −1k+ (s k − B −1ky k) sT k B−1 ks T k B−1 k y kAs k) sT k B−1 k+ (s k − B −1ky k) yT kyk T y k+ (s k − B −1k+ (s k − B −1ks T k B−1 k As kAs k) (As k) T(As k ) T As kAs k) sT k ATs T k AT As kLes <strong><strong>de</strong>ux</strong> mises à jour <strong><strong>de</strong>s</strong> matrices pour B −1k+1 sont donc les mêmes si AT =B −1k. On constate <strong>de</strong> plus la même propriété si l’on compare les mises à jour<strong>de</strong> la matrice B k .En vérifiant ceci avec les calculs (voir en annexe 4), on constate en effet queles <strong><strong>de</strong>ux</strong> algorithmes sont dans ce cas exactement les mêmes.En effectuant <strong><strong>de</strong>s</strong> tests sur d’autres fonctions linéaires F (x) = Ax, je suisarrivé aux résultats suivants :20
Tout d’abord, si l’on prend pour matrice initiale A −T , les <strong><strong>de</strong>ux</strong> algorithmesparviennent systématiquement au zéro <strong>de</strong> F en un même nombre d’itérations,quelquesoit le point initial choisi.Ensuite, si la matrice initiale est l’i<strong>de</strong>ntité, les <strong><strong>de</strong>ux</strong> algorithmes nécessitent,comme précé<strong>de</strong>mment, le même nombre d’itérations dans la plupart <strong><strong>de</strong>s</strong> cas.Toutefois, en testant les métho<strong><strong>de</strong>s</strong> sur <strong>de</strong> “gros” exemples, tels queF (x) =( 1111 −22221111 3333)x,il s’est avéré que BBM nécessitait plus d’itérations que BGM, et l’écart s’accentue<strong>de</strong> plus en plus au fur et à mesure que les composantes <strong>de</strong> la matricesgrandissent.Afin d’étudier les conjectures <strong>de</strong> Martinez, qui ont notamment été testéesdans le cas linéaire, prenons la même fonction que précé<strong>de</strong>mment :F (x) =( 1 −21 3)( 1x , x 1 =1), B 1 =( 1 00 1)Voici les termes <strong><strong>de</strong>s</strong> conjectures à chaque itération :k∣Conjecture 1 Conjecture 2∣ sT k s k−1s T k B−1 k y k∣∣∣ yT k y k−1yk T y k∣∣∣ sT k s k−1s T k s k∣∣ ∣ yT k y k−1 ∣∣yk T B ks k1 0 0 0 02 1.0275 1.9903 0.9932 1.27723 0.0988 0.6881 0.1639 1.40674 2.5170 1.9575 2.5170 1.9575Aucune <strong>de</strong> ces <strong><strong>de</strong>ux</strong> conjectures n’est en fait très significative, puisque pourchacune d’elles, le terme <strong>de</strong> gauche est tantôt supérieur, tantôt inférieur auterme <strong>de</strong> droite.21
En fait, le principe <strong><strong>de</strong>s</strong> <strong><strong>de</strong>ux</strong> conjectures est d’exprimer à chaque pas quellemétho<strong>de</strong> fonctionnera le mieux à l’itération suivante, mais pas laquelle serala plus rapi<strong>de</strong> sur l’ensemble <strong>de</strong> la résolution.Ces conjectures ne seront donc pas débattues plus longuement dans ce rapport.22
Tests sur d’autres fonctionsFonctions <strong>de</strong> Broy<strong>de</strong>n :Voici les résultats <strong><strong>de</strong>s</strong> tests effectués sur les fonctions données par Broy<strong>de</strong>ndans [1] :fonction nG nBbroy<strong>de</strong>n65 cas5 67 25broy<strong>de</strong>n65 cas6 > 500 > 500broy<strong>de</strong>n65 cas7 > 500 > 500broy<strong>de</strong>n65 cas8 > 500 > 500broy<strong>de</strong>n65 cas9 14 24broy<strong>de</strong>n65 cas10 58 > 500nG = nombre d’itérations nécessaires à BGM ou BGM bisnB = nombre d’itérations nécessaires à BBM ou BBM bisFonctions <strong>de</strong> Spedicato :La dimension <strong><strong>de</strong>s</strong> fonctions issues <strong>de</strong> [8] étant libre, voici une analyse <strong>de</strong>quelques-unes d’entre elles prises au hasard, en faisant varier la dimension :23
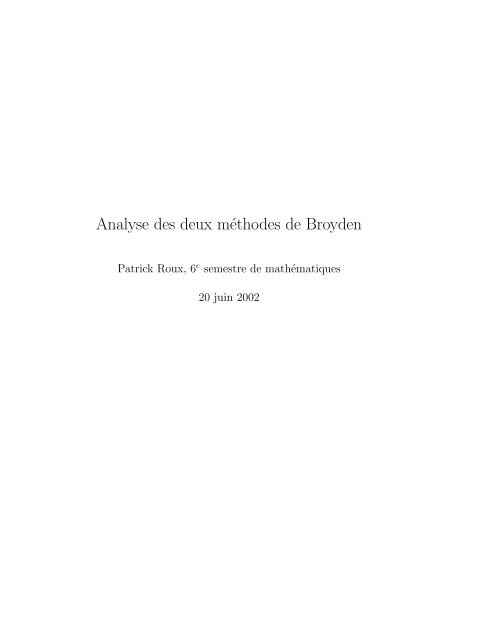
fonction dimension nG nBspedicato 1 3 49 > 5004 et plus > 500 > 500spedicato 4 2 11 1210 11 1220 12 12100 13 14spedicato 12 5 6 610 6 6100 6 6spedicato 17 3 96 274 et plus > 500 > 500spedicato 20 2 101 143 et plus > 500 > 500La fonction spedicato 17 ne fournit pas les mêmes résultats dans [8]. A cetitre, voici la réponse <strong>de</strong> son auteur lui-même :The algorithms were programmed by dr. Huang, who was a very bad programmer,[. . . ] so it must be a programming mistake that escaped my attention.La fonction spedicato 26 est intéressante, car pour <strong><strong>de</strong>s</strong> dimensions faibles,BGM fonctionne mieux que BBM, mais cette tendance s’inverse lorsque ladimension augmente.Le tableau suivant représente le nombre d’itérations nécessaires à chaque algorithmeen fonction <strong>de</strong> la dimension du problème.n 5 10 15 20 21 22 23 24 25 30 40BGM 13 19 28 37 40 41 45 45 50 62 90BBM 18 24 32 39 41 42 43 45 47 54 6924
9080nGnB7060504030205 10 15 20 25 30 35 40dimensionFonctions diverses :Voici tout d’abord <strong><strong>de</strong>ux</strong> fonctions créées par Martinez, dont le point initialest variable.fonction dimension point initial nG nBmartinez59Pb9 6 (0 . . . 0) T > 501 > 5016 (10 . . . 10) T 88 356 (−50 . . . − 50) T 68 306 (−100 . . . − 100) T 75 31martinez59Pb13 3 (1 1 1) T 9 116 (1 . . . 1) T 19 3010 (1 . . . 1) T 25 533 (0 0 0) T 9 106 (0 . . . 0) T 18 2910 (0 . . . 0) T 23 51Ensuite, voici <strong><strong>de</strong>ux</strong> fonctions dont le point initial est variable :25
fonction point initial nG nBroux 1 (0 4) T 30 14(1 1) T 19 9(14 14) T 16 12(−3 − 3) T 11 9(0.5 0.5) T 8 8(100 100) T 8 9(−1 − 1) T 10 11(−7 − 89) T 8 10roux 4 (1 2 1) T 12 > 500(4 0 − 2) T 15 > 500(1 − 1 1) T 16 > 500(100 99 98) T 49 38(890 132 470) T 80 20(89 ′ 000 13 ′ 200 47 ′ 000) T 27 > 500Les fonctions suivantes n’ont ni point initial, ni dimension fixée :fonction dimension point initial nG nBroux 2 5 (1 2 1 2 1) T 32 2510 (1 2 . . . 2 1) T 35 315 (−1 1 − 1 1 − 1) T 21 2510 (−1 1 . . . 1 − 1) T 21 255 (0 8 0 8 0) T 24 2410 (0 8 . . . 0 8) T 25 25roux 3 2 (−1 3) T 4 43 (−4 30 − 2) T 7 44 (−4 3 − 2 1) T 57 45 (−1 3 − 9 8 − 7) T 8 410 (−1 . . . − 1) T 3 3Voici pour finir diverses autres fonctions :26
fonction dimension nG nBbadScale 4 118 1506 286 459<strong>de</strong>nnis 2 13 14fairesBur<strong>de</strong>n413 3 17 15HVF3 2 120 > 500nocedal 2 46 4327
<strong>Analyse</strong> <strong><strong>de</strong>s</strong> résultatsLes conclusions suivantes peuvent être tirées <strong><strong>de</strong>s</strong> résultats obtenus.Premièrement, Broy<strong>de</strong>n a du commettre une erreur dans ses tests, car lafonction broy<strong>de</strong>n65 cas5, issue <strong>de</strong> son propre ouvrage <strong>de</strong> 1965 ([1]), est plusrapi<strong>de</strong>ment résolue par BBM que par BGM.C’est toutefois la seule <strong><strong>de</strong>s</strong> fonctions qu’il explicite qui est dans ce cas.En ce qui concerne les fonctions linéaires, les <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> utilisent en règlegénérale un même nombre d’itérations.Toutefois, la secon<strong>de</strong> métho<strong>de</strong> présente le défaut d’effectuer une division par‖y k ‖ 2 lors <strong>de</strong> la mise à jour <strong>de</strong> la matrice, ce qui pose <strong>de</strong> gros problèmesd’arrondis sur certaines fonctions.La fonction spedicato 26 est très révélatrice ; elle prouve en effet qu’une mêmefonction peut mieux convenir à une métho<strong>de</strong> en faible dimension, et moinsbien lorsque cette dimension augmente.La même remarque peut être faite au sujet du point initial : les fonctionsroux 1 et roux 4 en sont à ce titre <strong>de</strong> très bons exemples.Enfin, les tests effectués sur toutes les autres fonctions montrent que la premièremétho<strong>de</strong> n’est <strong>de</strong> loin pas plus efficace que la secon<strong>de</strong>.29
ConclusionAu vu <strong>de</strong> ce qui précè<strong>de</strong>, il me semble indéniable que la seule conclusion quipeut être tirée est qu’il n’y a pas <strong>de</strong> “bonne” et <strong>de</strong> “mauvaise” métho<strong>de</strong> <strong>de</strong>Broy<strong>de</strong>n : toutes <strong><strong>de</strong>ux</strong> fonctionnent très bien.Certaines fonctions, comme notamment les fonctions linéaires, sont résoluesplus rapi<strong>de</strong>ment par la première métho<strong>de</strong>, alors que pour d’autres c’est lasecon<strong>de</strong> métho<strong>de</strong> qui est la plus adaptée.Ce qui a aussi été vu est que les <strong><strong>de</strong>ux</strong> métho<strong><strong>de</strong>s</strong> sont très sensibles au choixdu point initial choisi, ainsi qu’à la dimension du problème.Il en est d’ailleurs certainement <strong>de</strong> même avec le choix <strong>de</strong> la matrice initiale.En fait, les termes “bonne” et “mauvaise” métho<strong><strong>de</strong>s</strong> sont initialement dus àBroy<strong>de</strong>n, qui a lui-même affirmé que la secon<strong>de</strong> ne fonctionnait pas bien.Par la suite, les tests effectués étaient très certainement involontairement favorablesà la première métho<strong>de</strong>, ce qui a renforcé son appellation <strong>de</strong> “bonne”métho<strong>de</strong>.Je terminerai en remerciant Michela Spada et Frank Crittin pour leur excellentcoaching durant toute la durée du semestre.31
AnnexesAnnexe 1 : liste <strong><strong>de</strong>s</strong> fonctions :broy<strong>de</strong>n65 cas5 à broy<strong>de</strong>n65 cas8 :- origine : [1] p 587- dimension : n- point initial : (−1 . . . − 1) T⎧⎪⎨ −(3 + αx 1 )x 1 + 2x 2 − β si i = 1F i (x) = x i−1 − (3 + αx i )x i + 2x i+1 − β si i = 2 ,. . . , n - 1⎪⎩x n−1 − (3 + αx n )x n − β si i = ncas 5 : α = −0.1 , β = 1 , n = 5cas 6 : α = −0.5 , β = 1 , n = 5cas 7 : α = −0.5 , β = 1 , n = 10cas 8 : α = −0.5 , β = 1 , n = 20broy<strong>de</strong>n65 cas9 :- origine : [1] p 587- dimension : 2- point initial : (−1.2 1) TF i (x) ={10(x 2 − x 2 1) si i = 11 − x 1 si i = 233
oy<strong>de</strong>n65 cas10 :- origine : [1] p 587- dimension : 2- point initial : (15 − 2) TF i (x) ={−13 + x 1 + ((−x 2 + 5)x 2 − 2)x 2 si i = 1−29 + x 1 + ((x 2 + 1)x 2 − 14)x 2 si i = 2spedicato 1 :- origine : [8], fonction 1- dimension : n- point initial : (−1.2 . . . − 1.2 − 1) TF i (x) ={1 − x 1 si i = 110(i − 1)(x i − x i−1 ) 2 si i = 2 ,. . . , nspedicato 4 :- origine : [8], fonction 4- dimension : n (pair)- point initial : (−1.2 1 . . . − 1.2 1) TF i (x) ={1 − x i si i impair10(x i − x 2 i−1) si i pairspedicato 12 :- origine : [8], fonction 12- dimension : n- point initial : (0.5 . . . 0.5) TF i (x) ={x 1 si i = 1cos x i−1 + x i − 1si i = 2 ,. . . , n34
spedicato 17 :- origine : [8], fonction 17- dimension : n- point initial : (10 . . . 10) T⎧⎪⎨ 3x 1 + (x 2 − 2x 1 ) + x2 24si i = 1F i (x) = 3x i + (x i+1 − 2x i + x i−1 ) +⎪⎩1(x 4 i+1 − x i−1 ) 2 si i = 2 ,. . . , n - 13x n + (20 − 2x n + x n−1 ) + 1(20 − x 4 n−1) 2 si i = nspedicato 20 :- origine : [8], fonction 20- dimension : n- point initial : ( 1 n . . . 1n )TF i (x) = n −n∑cos x j + i(1 − cos x i ) − sin x i , pour i = 1 ,. . . , nj=1spedicato 26 :- origine : [8], fonction 26- dimension : n- point initial : (1 . . . 1) TF i (x) =où h =1n+1⎧⎪⎨ 2x 1 − x 2 + 10h 2 sin(10hx 1 ) si i = 1−xi − 1 + 2x i − xi + 1 + 10h⎪⎩2 sin(10hx i ) si i = 2 ,. . . , n - 1−xn − 1 + 2x n − 1 + 10h 2 sin(10hx n ) si i = nmartinez59Pb9 :- origine : article 59 <strong>de</strong> Martinez, problème 9- dimension : 6- point initial : non spécifié35
F i (x) = ∑ j≠icot(b i · x j ) , pour i = 1 ,. . . , 6où b = (0.02249 0.02166 0.02083 0.02 0.01918 0.01835) Tmartinez59Pb13 :- origine : article 59 <strong>de</strong> Martinez, problème 13- dimension : n- point initial : non spécifié⎧⎪⎨ (3 − 0.1x 1 )x 1 + 1 − 2x 2 + x 1 si i = 1F i (x) = (3 − 0.1x i )x i + 1 − x i−1 − 2x i+1 + x i si i = 2 , . . . , n - 1⎪⎩(3 − 0.1x n )x n + 1 − 2x n−1 + x n si i = nroux 1 :- origine : <strong>Patrick</strong> <strong>Roux</strong>- dimension : 2- point initial : libre{F i (x) =sin(x 1 + x 2 ) si i = 1cos(x 1 − x 2 ) si i = 2roux 2 :- origine : <strong>Patrick</strong> <strong>Roux</strong>- dimension : n- point initial : libre( n∑)x j − x ij=1F i (x) =· x iroux 3 :- origine : <strong>Patrick</strong> <strong>Roux</strong>- dimension : n- point initial : libre36
F (x) = |x|roux 4 :- origine : <strong>Patrick</strong> <strong>Roux</strong>- dimension : 3- point initial : libreF i (x) = x i 1 + x i 2 + x i 3 , pour i = 1 , 2 , 3badScale :- origine : Frank Crittin- dimension : n (pair)- point initial : (2 . . . 2) TF i (x) ={100 cos x 2 i − x i si i impaircos x i · log(x 2 i + 1) − x isi i pair<strong>de</strong>nnis :- origine : [2] p 149- dimension : 2- point initial : (212 )T{F i (x) =x 2 1 + x 2 2 − 2 si i = 1e x1−1 + x 3 2 − 2 si i = 2fairesBur<strong>de</strong>n413 :- origine : Faires & Bur<strong>de</strong>n p 413- dimension : 3- point initial : (0 0 0) T⎧⎪⎨ 3x 1 − cos(x 2 · x 3 ) − x 1 si i = 1F i (x) = x⎪⎩2 1 − 81(x 2 + 0.1) + sin x 3 + 1.06 − x 2 si i = 2e −x 1·x 2+ 20x 3 + 10π−3 − 1 − x 3 2 3 si i = 337
HVF3 :- origine : [2], p 362- dimension : 3- point initial : (−1 0 0) TF i (x) =⎧⎪⎨ 10(x 3 − 10Ω) si i = 110( √ x⎪⎩2 1 + x 2 2 − 1) si i = 2x 3 si i = 3où Ω ={π arctan x 22 x 1si x 1 0π22 x 1+ 1 2si x 1 < 0nocedal :- origine : Nocedal & Wright p 288- dimension : 2- point initial : (−0.5 1.4) TF i (x) ={(x 1 + 3) · (x 3 2 − 7) + 18 si i = 1sin(x 2 · e x 1− 1) si i = 238
Annexe 2 : premier calcul matriciel :F (x) =x 1 =B 1 =( ) 1 −2x(1)31(1) 1 00 1Algorithme BGM :B 1 s 1 = −F (x 1 ) :( 1 00 1) ( s11s 2 1)( 1 −2= −1 3( ) −1⇒ s 1 =4( ) ( ) ( )1 1 2x 2 = x 1 + s 1 = + =(1) (−4) (−3)1 −2 2 8⇒ F (x2) ==1 3(3) (−7) (8 −1y 1 = F (x 2 ) − F (x 1 ) = − =−7 4B 2 = B 1 + (y 1 − B 1 s 1 ) sT 1s T 1 s 1 = · · · = 117( 25 −32−7 45) ( 11)9−11))( ) ( ) ( )1 25 −32 s1B 2 s 2 = −F (x 2 ) : 2817 −7 28 s 2 = −( )2 −7−136⇒ s 2 = 153 119( ) ( ) ( )2 −136 −30x 3 = x 2 + s 2 = +31=53 119153( ) ( ) (−40)1 −2 −30⇒ F (x3) = 1=53 1 3 −401 5053( ) (−150) (y 2 = F (x 3 ) − F (x 2 ) = 1 50 8 −374− =53 −150 −7153( )221B 3 = B 2 + (y 2 − B 2 s 2 ) sT 22425 −3266= · · · = 1s T 2 s 2 1921 409 4035)39
Algorithme BBM :( ) ( ) ( )1 0 −1 1s 1 = −B1 −1 F (x 1 ) = −=0 1 4 −4( ) ( ) ( )1 1 2x 2 = x 1 + s 1 = + =(1) (−4) (−3)1 −2 2 8⇒ F (x2) ==1 3(3) (−7) ( )8 −1 9y 1 = F (x 2 ) − F (x 1 ) = − =−7 4(−11)B2 −1 = B1 −1 + (s 1 − B1 −1 y 1 ) yT 1130 88= · · · = 1y1 T y 1 202 63 125( ) ( ) ( )130 88 8−424s 2 = −B2 −1 F (x 2 ) = − 1=202 63 125 −71202( ) ( ) ( )3712 −424−20x 3 = x 2 + s 2 = +−31=202 3711202( ) ( ) (−235)1 −2 −20450⇒ F (x3) = 1=202 1 3 −2351202( ) ( )−725( )450 8−1166y 2 = F (x 3 ) − F (x 2 ) = 1− =202 −725 −71202( )689B3 −1 = B2 −1 + (s 2 − B2 −1 y 2 ) yT 20.6269 0.4455= · · · = y2 T y 2 0.1159 0.734640
Annexe 3 : second calcul matriciel :( ) −11 −2G(x) = F −1 (x) =x =1 31 5( ) ( ) ( )1 −2 1 −1x 1 ==(1 3) (1)41 −2 1 0B 1 ==1 3 0 1( 1 −21 3( 3 2−1 1))xAlgorithme BGM :( ) ( ) ( ) ( 1 −2 s1B 1 s 1 = −G(x 1 ) :13 2 −11 3 s 2 = − 1 51−1 1 4( ) −1⇒ s 1 =0( ) ( ) ( )−1 −1 −2x 2 = x 1 + s 1 = + =(4) (0) (4)3 2 −2 2⇒ G(x2) = 1 =5 −1 1 41 5( ) ( )6( )2 1 −3y 1 = G(x 2 ) − G(x 1 ) = 1 − =5 6 11 5(1)B 2 = B 1 + (y 1 − B 1 s 1 ) sT 13 −10= · · · = 1s T 1 s 1 5 −1 15)( 3 −10B 2 s 2 = −G(x 2 ) : 1 5( )−1 15−18) ( s12s 2 2) ( 2= − 1 5 6)⇒ s 2 = 1 7 −4( ) −2x 3 = x 2 + s 2 =(4⇒ G(x3) = 1 1 3 25 7 −1 1y 2 = G(x 3 ) − G(x 2 ) = 135( ) −18) (−4) −32(24) −4856+ 1 7− 1 5B 3 = B 2 + (y 2 − B 2 s 2 ) sT 2s T 2 s 2 = · · · = 1425( ) −32(24) −4835( )56( 2 −62=6135( )14471 −802−337 1219= 1 7= 1)41
Algorithme BBM :( ) ( ) ( 3 2 1 −1s 1 = −B1 −1 G(x 1 ) = − 1 =5 −1 1 1 0( ) ( ) ( )−1 −1 −2x 2 = x 1 + s 1 = + =(4) (0) (4)3 2 −2 2⇒ G(x2) = 1 =5 −1 1 41 5( ) )6( 2 −3y 1 = G(x 2 ) − G(x 1 ) = 1 − =5 61 5 1( 11B −12 = B −11 + (s 1 − B −11 y 1 ) yT 1y T 1 y 1 = · · · = 125( 42 11 3)))( ) ( ) ( )42 1s 2 = −B2 −1 G(x 2 ) = − 11 2 −18=25 1 3 5 6125( ) ( ) ( )−4−2 −18 −68x 3 = x 2 + s 2 = +41 =25 −4125( ) ( ) (96)⇒ G(x3) = 1 1 3 2 −68−12=5 25 −1 1 961125( ) ( )164( −12 2 −62y 2 = G(x 3 ) − G(x 2 ) = 1 −125 1641 =5 61125( )14B3 −1 = B2 −1 + (s 2 − B2 −1 y 2 ) yT 2743 44= · · · = 1y2 T y 2 505 169 27)42
Annexe 4 : troisième calcul matriciel :F (x) =x 1 =B 1 =( 1 −2(1)311( ( 1 −21 3)x) T) −1= 1 5( 3 −12 1)Algorithme BGM :B 1 s 1 = −F (x 1 ) : 1 5( 3 −12 1) ( s11s 2 1)( 1 −2= −1 3) ( 11( ) −3⇒ s 1 =−14( ) ( ) ( )1 −3 −2x 2 = x 1 + s 1 = + =(1) (−14) (−13)1 −2 −2 24⇒ F (x2) ==1 3(−13) (−41) ( )24 −1 25y 1 = F (x 2 ) − F (x 1 ) = − =−41(4 −45)B 2 = B 1 + (y 1 − B 1 s 1 ) sT 151 −377= · · · = 1s T 1 s 1 205 205 615)( ) ( ) ( )1 51 −377 s1B 2 s 2 = −F (x 2 ) : 224205 205 615 s 2 = −( )2 −41697⇒ s 2 = 1530 7011( ) ( ) ( )−2697−363x 3 = x 2 + s 2 = +−131=530 70111530( ) ( ) (121)1 −2 −363−121⇒ F (x3) = 1=530 1 3 1211106( ) ( )0( −121 24−2y 2 = F (x 3 ) − F (x 2 ) = 1− =106 0 −411′ 665106 4 ′ 34643)
(B 3 = B 2 + (y 2 − B 2 s 2 ) sT 2= · · · = 1 290 ′ 921 −2 ′ 330 ′ 017s T 2 s 2 1 ′ 210 ′ 730 1 ′ 210 ′ 730 3 ′ 632 ′ 190)Algorithme BBM :( ) ( ) ( )1 1 −1 −3s 1 = −B1 −1 F (x 1 ) = −=−2 3 4 −14( ) ( ) ( )1 −3 −2x 2 = x 1 + s 1 = + =(1) (−14) (−13)1 −2 −2 24⇒ F (x2) ==1 3(−13) (−41) ( )24 −1 25y 1 = F (x 2 ) − F (x 1 ) = − =−41 4 −45B −12 = B −11 + (s 1 − B −11 y 1 ) yT 1y T 1 y 1 = · · · = 1530( 615 377−205 51( ) ( ) ( )615 377 24697s 2 = −B2 −1 F (x 2 ) = − 1=530 −205 51 −411530( ) ( ) ( )7011−2697−363x 3 = x 2 + s 2 = +−131=530 70111530( ) ( ) (121)1 −2 −363−121⇒ F (x3) = 1=530 1 3 1211106( ) ( )0( )−121 24−2y 2 = F (x 3 ) − F (x 2 ) = 1− =106 0 −411′ 665106 4 ′ 346B −13 = B −12 + (s 2 − B −12 y 2 ) yT 2y T 2 y 2 = · · · = 13 ′ 202 ′ 780)( 3 ′ 632 ′ 190 2 ′ 330 ′ 017−1 ′ 210 ′ 730 290 ′ 921)44
Bibliographie[1] Broy<strong>de</strong>n, C.G. [1965] : A class of methods for solving nonlinear simultaneousequations, Mathematics of Computation 19, p 577-593.[2] Dennis Jr, J.E. ; Schnabel, R.B. [1996] : Numerical methods for unconstrainedoptimization and nonlinear equations, SIAM, p 168-193.[3] Martinez, J.M. [2000] : Practical quasi-Newton methods for solving nonlinearsystems.[4] Martinez, J.M. [1979] : On the or<strong>de</strong>r of convergence of Broy<strong>de</strong>n-Gay-Schnabel’s method, Commentationes Mathematicae Universitatis Carolinae19, p 107-118.[5] Martinez, J.M. [1984] : A quasi-Newton method with modification of onecolumn per iteration, Computing 33, p 353-362.[6] Martinez, J.M. [1987] : Quasi-Newton methods with factorization scalingfor solving sparse nonlinear systems of equations, Computing 38, p 133-141.[7] Martinez, J.M. ; Ochi, L.S. [1982] : Sobre dois métodos <strong>de</strong> Broy<strong>de</strong>n, MatemáticaAplicada e Computacional 1, p 135-141.[8] Spedicato, E. ; Huang, Z. [1996] : Numerical experience with Newton-likemethods for nonlinear algebraic systems, Computing, p 68-89.45








![Identification du dual topologique de C[a, b] Louis ... - CQFD - EPFL](https://img.yumpu.com/32808525/1/184x260/identification-du-dual-topologique-de-ca-b-louis-cqfd-epfl.jpg?quality=85)




