pdf (297K) - Batan
pdf (297K) - Batan
pdf (297K) - Batan

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Machine) [1] . Perkembangan dalam bidang<br />
komputerisasi pada mesin perkakas terus berlanjut<br />
hingga tahun 1988 mulai diperkenalkan<br />
penggunaan mesin CNC (Computerized Numerical<br />
Control). Perkembangan paling frontal terjadi pada<br />
tahun 2005 dengan adanya suatu metoda untuk<br />
meningkatkan kemampuan kerja mesin frais<br />
konvensional menjadi mesin frais kontrol numerik<br />
dengan cara retrofit, yaitu dengan mengganti lead<br />
screw dengan ball screw dan penambahan sistem<br />
servo.<br />
Pada mesin frais konvensional yang<br />
universal ada tiga gerakkan utama yang dapat<br />
diinovasi ke dalam bentuk kontrol numerik, yaitu<br />
gerak meja kerja arah ke samping kanan dan kiri,<br />
arah maju dan mundur, kemudian gerak spindel ke<br />
atas dan ke bawah. Proses inovasi tersebut dapat<br />
dilakukan dengan menggunakan motor servo<br />
sebagai penggerak sistem yang canggih. Pada<br />
makalah ini perlu dilakukan perhitungan-<br />
perhitungan guna memperoleh detail torsi yang<br />
diperlukan untuk mengoperasikan motor servo.<br />
Selain itu dengan melakukan perhitungan untuk<br />
memperoleh nilai pendekatan yang pasti tentang<br />
ukuran aplikasi motor servo secara mekanik<br />
seberapa besar kecepatan dan percepatan yang<br />
minimal dan maksimal. Penetapan pilihan motor<br />
servo yang sesuai hasil perhitungan akan<br />
menghasilkan pilihan yang tepat dan hemat.<br />
TEORI<br />
Motor servo, amplifier dan kontroler adalah<br />
komponen yang banyak dipakai secara luas dalam<br />
rancang bangun otomasi [2] . Komponen-komponen<br />
tersebut dapat menggerakkan mesin perkakas<br />
otomatis dengan gerakan yang komplek dan<br />
canggih. Sebagai komponen yang berperan<br />
menggerakkan maka kemampuan motor servo perlu<br />
direncanakan dan diperhitungkan dengan seksama<br />
sedemikian rupa sehingga diperoleh sistem<br />
penggerak yang tepat.<br />
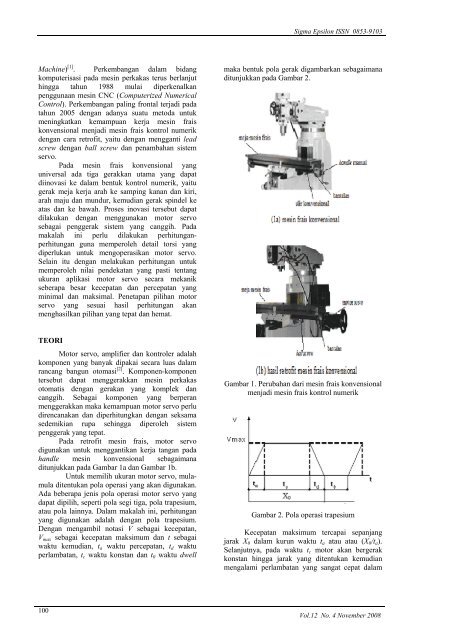
Pada retrofit mesin frais, motor servo<br />
digunakan untuk menggantikan kerja tangan pada<br />
handle mesin konvensional sebagaimana<br />
ditunjukkan pada Gambar 1a dan Gambar 1b.<br />
Untuk memilih ukuran motor servo, mulamula<br />
ditentukan pola operasi yang akan digunakan.<br />
Ada beberapa jenis pola operasi motor servo yang<br />
dapat dipilih, seperti pola segi tiga, pola trapesium,<br />
atau pola lainnya. Dalam makalah ini, perhitungan<br />
yang digunakan adalah dengan pola trapesium.<br />
Dengan mengambil notasi V sebagai kecepatan,<br />
Vmax sebagai kecepatan maksimum dan t sebagai<br />
waktu kemudian, ta waktu percepatan, td waktu<br />
perlambatan, tc waktu konstan dan t0 waktu dwell<br />
100<br />
Sigma Epsilon ISSN 0853-9103<br />
maka bentuk pola gerak digambarkan sebagaimana<br />
ditunjukkan pada Gambar 2.<br />
Gambar 1. Perubahan dari mesin frais konvensional<br />
menjadi mesin frais kontrol numerik<br />
Gambar 2. Pola operasi trapesium<br />
Kecepatan maksimum tercapai sepanjang<br />
jarak X0 dalam kurun waktu ta atau atau (X0/ta).<br />
Selanjutnya, pada waktu tc motor akan bergerak<br />
konstan hingga jarak yang ditentukan kemudian<br />
mengalami perlambatan yang sangat cepat dalam<br />
Vol.12 No. 4 November 2008