DIAGRAM ALIR (FLOWCHART) - USU Institutional Repository ...
DIAGRAM ALIR (FLOWCHART) - USU Institutional Repository ...
DIAGRAM ALIR (FLOWCHART) - USU Institutional Repository ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Hitam<br />
Ya<br />
Wadah 1<br />
Tidak<br />
<strong>DIAGRAM</strong> <strong>ALIR</strong> (<strong>FLOWCHART</strong>)<br />
Tidak<br />
Merah<br />
Ya<br />
Wadah 2<br />
Start<br />
Jalankan Roller<br />
Posisi Awal?<br />
Hentikan Roller<br />
Baca Warna<br />
Tidak<br />
Ya<br />
Kuning<br />
Ya<br />
Wadah 3<br />
Tidak<br />
Hijau<br />
Ya<br />
Wadah 4<br />
Tidak<br />
Biru<br />
Ya<br />
Wadah 5<br />
Universitas Sumatera Utara<br />
Tidak<br />
Tidak
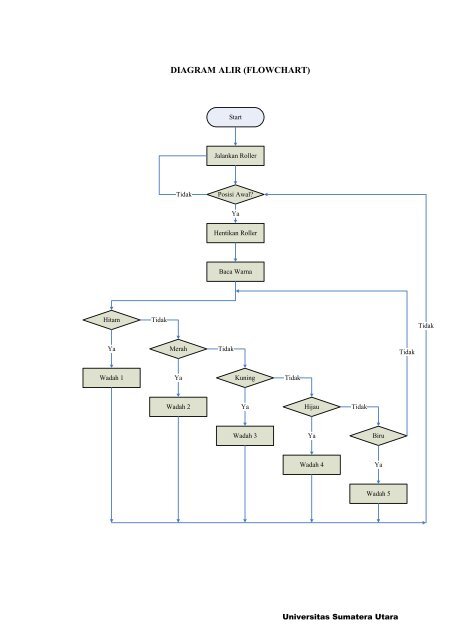
Program diawali dengan strat. Kemudian program akan menjalankan roler<br />
keposisi awal. Selanjutnya program akan melihat posisi benda apakah posisi benda<br />
sudah tepat di depan sensor warna atau belum. Jika posisi benda sudah tepat di depan<br />
sensor warna, maka mikrokontroler akan membaca warna dari benda.<br />
Untuk membaca warna, program dimulai dengan mengosongkan isi register 0<br />
(r0). Selanjutnya pada pemfilter merah (RED) S2 diset low(0) dan S3 juga diset<br />
low(0) dengan memberikan perintah clr. Lalu selama selang waktu pada rutin<br />
interupt, program sinyal dibaca dan data digital ditambahkan pada r0. Program<br />
dilanjutkan pada pemfilter hijau (GREEN) dengan menset S2 pada logika high(1) dan<br />
S3 pada logika high(1) yaitu dengan perintah setb. Lalu selama selang waktu pada<br />
rutin interupt, program sinyal dibaca dan data digital ditambahkan kembali pada<br />
r0.Lalu program dilanjutkan pada pemfilter biru (BLUE) dengan menset S2 pada<br />
logika low(0) dan S3 pada logika high(1). Lalu selama selang waktu pada rutin<br />
interupt, program sinyal dibaca dan data digital ditambahkan lagi pada r0.<br />
Kemudian diteruskan pada pemfilter tanpa warna (CLEAR) dengan menset S2 pada<br />
logika high(1) dan S3 pada logika low(0). Lalu selama selang waktu pada rutin<br />
interupt, program sinyal dibaca dan data digital ditambahkan juga pada r0.<br />
Selanjutnya data digital atau nilai dari r0 dicopykan pada accumulator a.<br />
Kemudian program akan membandingkan data pada accumulator a dengan<br />
data hasil pengujian dari sensor warna.<br />
Jika data yang diterima sama dengan data dari warna hitam, maka benda akan<br />
langsung dilepaskan tepat pada wadah 1 atau pada posisi utama dimana bola<br />
dilepaskan, kemudian program akan kembali ke rutin awal untuk kembali<br />
menjalankan roler keposisi awal.<br />
Jika data yang diterima sama dengan data dari warna merah, maka wadah 2<br />
digeser pada posisi utama lalu benda dilepaskan pada wadah 2, kemudian program<br />
akan kembali ke rutin awal untuk kembali menjalankan roler keposisi awal.<br />
Universitas Sumatera Utara
Jika data yang diterima sama dengan data dari warna kuning, maka wadah 3<br />
digeser pada posisi utama dan benda dilepaskan pada wadah 3, kemudian program<br />
akan kembali ke rutin awal untuk kembali menjalankan roler keposisi awal.<br />
Jika data yang diterima sama dengan data dari warna hijau, maka wadah 4<br />
digeser pada posisi utama dan benda dilepaskan pada wadah 4, kemudian program<br />
akan kembali ke rutin awal untuk kembali menjalankan roler keposisi awal.<br />
Jika data yang diterima sama dengan data dari warna biru, maka wadah 5<br />
digeser pada posisi utama dan benda dilepaskan pada wadah 5, kemudian program<br />
akan kembali ke rutin awal untuk kembali menjalankan roler keposisi awal.<br />
Jika data yang diterima tidak sama dengan data yang ada pada salah satu<br />
warna benda tersebut maka program akan kembali membaca data sampai memperoleh<br />
data yang sama dengan salah satu data warna benda yang telah ditentukan. Demikian<br />
seterusnya.<br />
Universitas Sumatera Utara