

Esercizi e quesiti di esame degli anni precedenti - laboratorio di ...
Esercizi e quesiti di esame degli anni precedenti - laboratorio di ...
Esercizi e quesiti di esame degli anni precedenti - laboratorio di ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
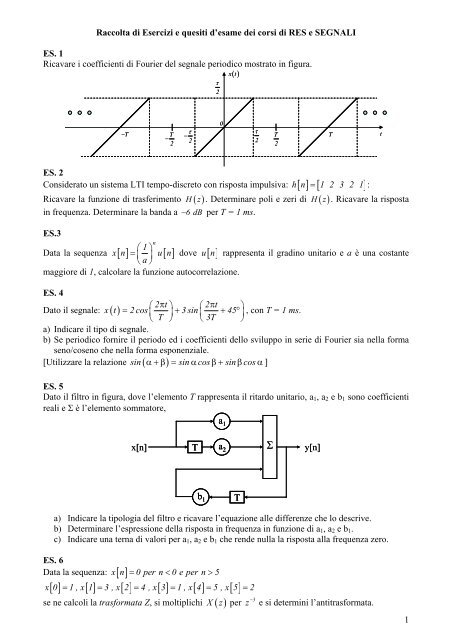
Raccolta <strong>di</strong> <strong>Esercizi</strong> e <strong>quesiti</strong> d’<strong>esame</strong> dei corsi <strong>di</strong> RES e SEGNALI<br />
ES. 1<br />
Ricavare i coefficienti <strong>di</strong> Fourier del segnale perio<strong>di</strong>co mostrato in figura.<br />
x ( t )<br />
ES. 2<br />
−<br />
T<br />
T<br />
−<br />
2<br />
ττ<br />
−<br />
2<br />
ττ<br />
2<br />
0<br />
Considerato un sistema LTI tempo-<strong>di</strong>screto con risposta impulsiva: hn [ ] = [ 12 3 21]<br />
:<br />
Ricavare la funzione <strong>di</strong> trasferimento H( z ) . Determinare poli e zeri <strong>di</strong> H( z ) . Ricavare la risposta<br />
in frequenza. Determinare la banda a − 6dBper<br />
T = 1 ms.<br />
ES.3<br />
n<br />
⎛1⎞ Data la sequenza x[ n] = ⎜ ⎟ u[ n]<br />
⎝a⎠ maggiore <strong>di</strong> 1, calcolare la funzione autocorrelazione.<br />
ττ<br />
2<br />
T<br />
2<br />
dove un [ ] rappresenta il gra<strong>di</strong>no unitario e a è una costante<br />
ES. 4<br />
⎛2πt⎞ ⎛2πt ⎞<br />
Dato il segnale: x () t = 2cos⎜ ⎟+ 3sin⎜ + 45°<br />
⎟,<br />
con T = 1 ms.<br />
⎝ T ⎠ ⎝ 3T ⎠<br />
a) In<strong>di</strong>care il tipo <strong>di</strong> segnale.<br />
b) Se perio<strong>di</strong>co fornire il periodo ed i coefficienti dello sviluppo in serie <strong>di</strong> Fourier sia nella forma<br />
seno/coseno che nella forma esponenziale.<br />
sin α+β = sin αcosβ+ sinβcos α]<br />
[Utilizzare la relazione ( )<br />
ES. 5<br />
Dato il filtro in figura, dove l’elemento T rappresenta il ritardo unitario, a1, a2 e b1 sono coefficienti<br />
reali e Σ è l’elemento sommatore,<br />
x[n] T<br />
b 1<br />
a 1<br />
a 2<br />
T<br />
Σ<br />
y[n]<br />
a) In<strong>di</strong>care la tipologia del filtro e ricavare l’equazione alle <strong>di</strong>fferenze che lo descrive.<br />
b) Determinare l’espressione della risposta in frequenza in funzione <strong>di</strong> a1, a2 e b1.<br />
c) In<strong>di</strong>care una terna <strong>di</strong> valori per a1, a2 e b1 che rende nulla la risposta alla frequenza zero.<br />
ES. 6<br />
Data la sequenza: [ ]<br />
x n = 0 per n < 0 e per n > 5<br />
x[ 0] = 1 , x[ 1] = 3 , x[ 2] = 4 , x[ 3] = 1 , x[ 4] = 5 , x[ 5] = 2<br />
se ne calcoli la trasformata Z, si moltiplichi X ( z ) per<br />
3<br />
z − e si determini l’antitrasformata.<br />
T<br />
t<br />
1
ES. 7<br />
Dato il segnale x () t = exp⎡⎣−( t−t0) ⎤⎦<br />
U( t−t0) , dove ( )<br />
costante positiva, ricavare:<br />
a) La trasformata <strong>di</strong> Fourier <strong>di</strong> x() t .<br />
b) Lo spettro <strong>di</strong> ampiezza e <strong>di</strong> fase <strong>di</strong> x( t ) .<br />
ES. 8<br />
Date due sequenze: x1 [ n] = [ 1 1 1 1]<br />
e x2 [ n] [ 1 0.5 0 0.5]<br />
a) Ricavare la convoluzione lineare tra x1 [ n ] e x2 [ n ] .<br />
U t è la funzione gra<strong>di</strong>no unitario e t 0 è una<br />
= − definite per n= 0,1,2,3:<br />
b) Impostare il problema per il calcolo della convoluzione lineare me<strong>di</strong>ante l’impiego della<br />
Trasformata <strong>di</strong> Fourier Discreta (DFT).<br />
ES. 9<br />
Dato il sistema LTI tempo-<strong>di</strong>screto rappresentato dall’equazione alle <strong>di</strong>fferenze:<br />
1 1<br />
y[ n] = y[ n− 1] + x[ n] − x[ n− 1]<br />
4 2<br />
H z .<br />
a) Ricavare la funzione <strong>di</strong> trasferimento del filtro, ( )<br />
b) Ricavare poli, zeri, stu<strong>di</strong>are la regione <strong>di</strong> convergenza e la stabilità del filtro.<br />
c) Calcolare la risposta impulsiva hn. [ ]<br />
ES. 10<br />
Fornire le definizioni <strong>di</strong>:<br />
a) Segnale <strong>di</strong> energia e segnale <strong>di</strong> potenza, fornire alcuni esempi.<br />
b) Correlazione tra due segnali <strong>di</strong> energia.<br />
c) Autocorrelazione con relative proprietà.<br />
⎛2πt ⎞<br />
d) Ricavare l’autocorrelazione <strong>di</strong> x() t = A⋅rectT() t ⋅ sin<br />
1 ⎜ +α⎟<br />
con A costante positiva, T<br />
⎝ T ⎠<br />
periodo, α fase della sinusoide, e rectT ( t ) funzione che vale 1 per 0 ≤ t ≤ T<br />
1<br />
1 ed è nulla<br />
altrove, T1>> T .<br />
ES. 11<br />
Calcolare i coefficienti a k dello sviluppo in serie <strong>di</strong> Fourier per il segnale x () t perio<strong>di</strong>co <strong>di</strong><br />
periodo T.<br />
x(t)<br />
ES. 12<br />
Dato il segnale x () t exp{ a t }<br />
A<br />
-T/2 T/2<br />
-A<br />
= − , con a costante positiva:<br />
a) Determinare X ( f ) , la trasformata <strong>di</strong> Fourier <strong>di</strong> x ( t ) .<br />
b) Disegnare un grafico qualitativo <strong>di</strong> X ( f ) .<br />
c) Ricavare la larghezza <strong>di</strong> banda a –6 dB <strong>di</strong> X ( f ) .<br />
t<br />
2
ES. 13<br />
Dato il sistema LTI tempo-<strong>di</strong>screto rappresentato dall’equazione alle <strong>di</strong>fferenze:<br />
1 1<br />
y [ n] = y[ n− 1] + x[ n] − x[ n− 1]<br />
3 2<br />
H z .<br />
a) Ricavare la funzione <strong>di</strong> trasferimento del filtro, ( )<br />
b) Ricavare poli, zeri, stu<strong>di</strong>are la regione <strong>di</strong> convergenza e la stabilità del filtro.<br />
c) Calcolare la risposta impulsiva hn. [ ]<br />
ES. 14<br />
Calcolare i coefficienti a k dello sviluppo in serie <strong>di</strong> Fourier per il segnale x () t perio<strong>di</strong>co <strong>di</strong><br />
periodo T.<br />
x(t)<br />
ES. 15<br />
A<br />
-T/2 T/2<br />
-A<br />
Considerate le sequenze x [ n] = [ 212]<br />
e hn [ ] = [ 1− 1 0]<br />
per n = 0,1,2,<br />
dove hn [ ] è la risposta<br />
impulsiva <strong>di</strong> un filtro FIR (in particolare, un <strong>di</strong>fferenziatore):<br />
a) Ricavare l’uscita, y [ n ] , dal filtro quando in ingresso è presente x[ n ] .<br />
b) Impostare il problema per il calcolo <strong>di</strong> y [ n ] me<strong>di</strong>ante l’impiego delle trasformate <strong>di</strong> Fourier<br />
<strong>di</strong>screte (DFT).<br />
ES. 16<br />
Dato il sistema LTI tempo-<strong>di</strong>screto rappresentato dall’equazione alle <strong>di</strong>fferenze:<br />
1 1<br />
y[ n] = y[ n− 1] + x[ n] − x[ n− 1]<br />
2 3<br />
H z .<br />
a) Ricavare la funzione <strong>di</strong> trasferimento del filtro, ( )<br />
b) Ricavare poli, zeri, stu<strong>di</strong>are la regione <strong>di</strong> convergenza e la stabilità del filtro.<br />
c) Calcolare la risposta impulsiva hn. [ ]<br />
ES. 17<br />
Dato il segnale non perio<strong>di</strong>co, tempo continuo, definito su tutto l’asse reale x () t exp ( a t )<br />
parametro reale positivo:<br />
1<br />
a) Se ne <strong>di</strong>segni un grafico qualitativo per a 0.2 s −<br />
= , con t da − 10 s a<br />
b) Si calcoli la sua trasformata <strong>di</strong> Fourier, X ( f ) .<br />
1<br />
c) Si <strong>di</strong>segni un grafico qualitativo dello spettro per a 0.2 s −<br />
= .<br />
1<br />
d) Si determini la larghezza <strong>di</strong> banda a –6 dB per a 0.2 s −<br />
= .<br />
t<br />
+ 10 s .<br />
ES. 18<br />
⎧1<br />
− T < t < + T<br />
Dato il segnale non perio<strong>di</strong>co, tempo continuo: x() t = ⎨<br />
⎩0<br />
fuori dell'intervallo − T, + T<br />
secon<strong>di</strong>, calcolare:<br />
= − con a<br />
[ ]<br />
con T = 4<br />
3
a) L’autocorrelazione e fare un grafico in<strong>di</strong>cativo.<br />
b) La correlazione col segnale y ( t) = x( t− t1)<br />
, essendo t1= 9 secon<strong>di</strong>; fare un grafico<br />
in<strong>di</strong>cativo.<br />
ES. 19<br />
Si consideri una sinusoide <strong>di</strong> frequenza 200 Hz.<br />
a) Se essa viene campionata con frequenza <strong>di</strong> campionamento <strong>di</strong> 500 Hz, è possibile ricostruire<br />
la sinusoide dai campioni e come?<br />
b) Se essa viene campionata con frequenza <strong>di</strong> campionamento <strong>di</strong> 250 Hz, e si applica la<br />
procedura <strong>di</strong> ricostruzione in<strong>di</strong>cata nel precedente punto (a), cosa si ottiene?<br />
ES. 20<br />
Si supponga la serie <strong>di</strong> due sistemi LTI con le seguenti risposte impulsive:<br />
1<br />
[ ]<br />
h n<br />
⎧0<br />
per n< 0 e per n> 3<br />
= ⎨<br />
⎩1<br />
per 0≤n≤3 , h [ n]<br />
2<br />
⎧0<br />
per n< 0 e per n> 2<br />
= ⎨<br />
⎩1<br />
per 0≤n≤ 2<br />
a) Calcolare H( z ) del sistema serie me<strong>di</strong>ante le funzioni <strong>di</strong> trasferimento <strong>di</strong> ciascuno <strong>di</strong> essi,<br />
cioè H1( z ) e H2( z ) .<br />
b) Calcolare la risposta impulsiva hn [ ] della serie me<strong>di</strong>ante inversione <strong>di</strong> H( z ) .<br />
ES. 21<br />
Riguardo alla trasformata <strong>di</strong> Hilbert:<br />
a) Darne la definizione e mostrare la risposta in frequenza in modulo e fase del relativo filtro<br />
che la implementa.<br />
b) Ricavare la risposta impulsiva del filtro <strong>di</strong> Hilbert.<br />
cos 2π f t .<br />
c) Determinare la trasformata <strong>di</strong> Hilbert del ( )<br />
ES. 22<br />
Date le sequenze x[ n ] e y[ n ] , dove quest’ultima è l’uscita <strong>di</strong> un sistema LTI (avente risposta<br />
impulsiva hn) [ ] quando in ingresso è presente x[ n ] , mostrare che:<br />
a) Rxy [ n] = h[ n] ∗ Rx[ n]<br />
;<br />
b) Ry[ n] = Rx[ n] ∗ Rh[ n]<br />
.<br />
Dove Rx [ n ] , Ry [ n ] e Rh [ n ] in<strong>di</strong>cano le funzioni <strong>di</strong> autocorrelazione <strong>di</strong> x[ n ] , y[ n ] e hn, [ ]<br />
mentre Rxy [ n ] è la funzione <strong>di</strong> mutua correlazione tra x[ n ] e y[ n ] .<br />
ES. 23<br />
Date le sequenze x[ n] = [ 1, 2, 3, 1]<br />
e h[ n] [ 1, 3, 3, 1]<br />
a)<br />
b)<br />
c)<br />
Rx [ n ]<br />
Rh [ n ]<br />
y[ n ]<br />
d) Ry [ n ]<br />
e) Rxy [ n ] .<br />
0<br />
= − − con n = 0,1,2,3,<br />
calcolare:<br />
4
ES. 24<br />
Dato il segnale riportato in figura:<br />
− T<br />
T<br />
−<br />
2<br />
a) Scrivere l’espressione <strong>di</strong> x() t ed in<strong>di</strong>care il tipo <strong>di</strong> segnale.<br />
b) Ricavare la rappresentazione <strong>di</strong> nel dominio della frequenza <strong>di</strong> x( t ) .<br />
ES. 25<br />
Dato il sistema LTI:<br />
ττ<br />
−<br />
2<br />
Z-1 Z-1 Z-1 ττ<br />
2<br />
0<br />
( )<br />
x t<br />
x [ n ]<br />
a<br />
yn [ ]<br />
a) Scrivere l’equazione alle <strong>di</strong>fferenze che lega l’ingresso x[ n ] con l’uscita y[ n ] ed in<strong>di</strong>care il<br />
tipo <strong>di</strong> filtro.<br />
b) Ricavare la funzione <strong>di</strong> trasferimento H( z ) e la risposta impulsiva hn [ ] del filtro.<br />
c) Per<br />
1<br />
2<br />
a= b=<br />
, avendo in ingresso la sequenza x[ n] = [ 2 1 2 1]<br />
, determinare [ ]<br />
c1) me<strong>di</strong>ante antitrasformazione <strong>di</strong> Y( z ) ;<br />
b<br />
ττ<br />
2<br />
T<br />
2<br />
Sommatore<br />
T<br />
t<br />
y n :<br />
c2) me<strong>di</strong>ante convoluzione lineare con la risposta impulsiva.<br />
d) Ripetere il punto c2) calcolando la convoluzione lineare attraverso la Trasformata <strong>di</strong> Fourier<br />
Discreta (DFT).<br />
e) Determinare la risposta in frequenza del filtro e la banda a − 6dBper<br />
T = 1 ms.<br />
ES. 26<br />
Dato il sistema LTI:<br />
Z-1 Z-1 Z-1 Z-1 Z-1 Z-1 c<br />
x [ n ]<br />
Sommatore<br />
y [ n ]<br />
a) Scrivere l’equazione alle <strong>di</strong>fferenze e specificare il tipo <strong>di</strong> filtro.<br />
b) Ricavare la funzione <strong>di</strong> trasferimento H( z ) del filtro e determinare poli e zeri.<br />
a<br />
Z-1 Z-1 Z-1 c) Per a =− 2,<br />
b = 2 e c=− 1:<br />
c1) Calcolare, antitrasformando H( z ) , la risposta impulsiva del sistema causale.<br />
c2) Calcolare la risposta impulsiva causale <strong>di</strong>rettamente dall’equazione alle <strong>di</strong>fferenze.<br />
c3) Stu<strong>di</strong>are la stabilità del filtro.<br />
1 1 1<br />
d) Nel caso a =− , b = , c =− ripetere i punti (b), (c1), (c3) e determinare il modulo<br />
4 2 16<br />
della risposta in frequenza del filtro.<br />
b<br />
5
ES. 27<br />
Considerato il segnale perio<strong>di</strong>co <strong>di</strong> periodo unitario, definito in [ , ]<br />
x t<br />
2<br />
=π<br />
2<br />
4t − 4t+ 1 t∈ [ 0, 1]<br />
() ( )<br />
01 dalla relazione:<br />
a) Calcolare la componente continua del segnale.<br />
b) In<strong>di</strong>care le proprietà dei coefficienti dello sviluppo in serie <strong>di</strong> Fourier del segnale x( t ) .<br />
c) Calcolare i coefficienti c k dello sviluppo in serie <strong>di</strong> Fourier <strong>di</strong> x( t ) .<br />
(Suggerimento: calcolare i coefficienti del segnale derivato ed utilizzare il legame con c k )<br />
ES. 28<br />
Date le sequenze: x[ n] = [ 2, 1, 2, 1]<br />
(input <strong>di</strong> un sistema LTI), hn [ ] [ 11 , , 12 , ]<br />
del sistema LTI), in<strong>di</strong>cando con y[ n ] la sequenza <strong>di</strong> output dal sistema, calcolare:<br />
a) La sequenza yn. [ ]<br />
b) Le funzioni <strong>di</strong> autocorrelazione R l , R [ l ] e R [ l ] .<br />
[ ] xx<br />
c) La funzione <strong>di</strong> cross-correlazione R [ ] xy l .<br />
ES. 29<br />
Dato il sistema LTI:<br />
hh<br />
Z-1 Z-1 Z-1 Z-1 Z-1 Z-1 c<br />
x [ n ]<br />
Sommatore<br />
yn [ ]<br />
a<br />
Z-1 Z-1 Z-1 b<br />
yy<br />
= − (risposta impulsiva<br />
a) Scrivere l’equazione alle <strong>di</strong>fferenze e specificare il tipo <strong>di</strong> filtro.<br />
b) Ricavare la funzione <strong>di</strong> trasferimento H( z ) del filtro e determinare poli e zeri.<br />
c) Per a =− 4,<br />
b= 4 e c=− 4:<br />
c1) Calcolare, antitrasformando H( z ) , la risposta impulsiva del sistema causale.<br />
c2) Calcolare la risposta impulsiva causale <strong>di</strong>rettamente dall’equazione alle <strong>di</strong>fferenze.<br />
c3) Stu<strong>di</strong>are la stabilità del filtro.<br />
1 2 1<br />
d) Nel caso a =− , b = , c =− ripetere i punti (b), (c1), (c3) e determinare il modulo della<br />
3 3 9<br />
risposta in frequenza del filtro.<br />
ES. 30<br />
Considerato il segnale perio<strong>di</strong>co <strong>di</strong> periodo unitario, definito in [ 01 , ] dalla relazione:<br />
2 2 1<br />
x() ⎛ ⎞<br />
t =π ⎜2t − 2t + ⎟ [ ]<br />
⎝ 2 ⎠ , t 0 1 ∈<br />
a) Calcolare la componente continua del segnale.<br />
b) In<strong>di</strong>care le proprietà dei coefficienti dello sviluppo in serie <strong>di</strong> Fourier del segnale x( t ) .<br />
c) Calcolare i coefficienti c k dello sviluppo in serie <strong>di</strong> Fourier <strong>di</strong> x( t ) .<br />
(Suggerimento: calcolare i coefficienti del segnale derivato ed utilizzare il legame con c k )<br />
6
ES. 31<br />
Date le sequenze: x[ n] = [ 1232 , , , ] (input <strong>di</strong> un sistema LTI), hn [ ] [ 1, 212 , , ]<br />
del sistema LTI), in<strong>di</strong>cando con y[ n ] la sequenza <strong>di</strong> output dal sistema, calcolare:<br />
a) La sequenza yn. [ ]<br />
b) Le funzioni <strong>di</strong> autocorrelazione<br />
R [ ] xx l , [ ] hh<br />
c) La funzione <strong>di</strong> cross-correlazione Rxy [ l ] .<br />
ES. 32<br />
Dato il segnale: x() t mostrato in figura:<br />
x () t<br />
a) In<strong>di</strong>care il tipo <strong>di</strong> segnale.<br />
b) Calcolare la trasformata <strong>di</strong> Fourier <strong>di</strong> x( t ) .<br />
3<br />
2<br />
1<br />
0<br />
R l e R [ l ] .<br />
yy<br />
T 2T 3T<br />
ES. 33<br />
Un sistema LTI causale è descritto dall’equazione alle <strong>di</strong>fferenze:<br />
yn= yn− 1+ yn− 2+ xn− 1<br />
= − (risposta impulsiva<br />
[ ] [ ] [ ] [ ]<br />
a) In<strong>di</strong>care la tipologia del filtro e ricavare la sua funzione <strong>di</strong> trasferimento H( z ) .<br />
b) Rappresentare i poli e gli zeri <strong>di</strong> H( z ) ed in<strong>di</strong>care la regione <strong>di</strong> convergenza.<br />
c) Determinare la risposta impulsiva del sistema e <strong>di</strong>re se il sistema è stabile o meno.<br />
ES. 34<br />
Date le due sequenze x1 [ n ] e 2 [ ]<br />
1<br />
[ ]<br />
x n<br />
1<br />
x n :<br />
0 1 2 3 4 n<br />
2<br />
[ ]<br />
x n<br />
1<br />
0 1<br />
-0.5<br />
2<br />
t<br />
3 4 n<br />
a) Fornire la definizione <strong>di</strong> convoluzione lineare e circolare tra x1 [ n ] e 2 [ ]<br />
x n , in<strong>di</strong>candone le<br />
<strong>di</strong>fferenze.<br />
x n .<br />
c) Mostrare come è possibile calcolare la convoluzione lineare attraverso la DFT.<br />
b) Calcolare la convoluzione lineare tra x1 [ n ] e 2 [ ]<br />
ES. 35<br />
⎛ π ⎞<br />
Dato il segnale perio<strong>di</strong>co: xt () = cos4t ( π ) + 2sin8t ⎜ π + ⎟<br />
⎝ 6 ⎠<br />
a) Determinare il periodo del segnale e calcolare i coefficienti <strong>di</strong> Fourier nella forma reale<br />
a,b e complessa c k .<br />
( )<br />
k k<br />
7
) Disegnare lo spettro <strong>di</strong> ampiezza e <strong>di</strong> fase <strong>di</strong> x( t ) .<br />
c) Calcolare la potenza me<strong>di</strong>a <strong>di</strong> x( t ) .<br />
ES. 36<br />
Dato il filtro che effettua la me<strong>di</strong>a mobile su N campioni (cioè la me<strong>di</strong>a aritmetica <strong>degli</strong> ultimi N<br />
campioni della sequenza <strong>di</strong> ingresso x[ n ] ):<br />
n<br />
1<br />
=<br />
N ∑ k= n− N+ 1<br />
[ ] [ ]<br />
yn xk<br />
a) Verificare che il sistema è lineare e tempo-invariante.<br />
b) Ricavare e <strong>di</strong>segnare la risposta impulsiva del filtro.<br />
c) Determinare la risposta in frequenza in<strong>di</strong>cando la tipologia del filtro ed eventuali suoi<br />
impieghi.<br />
ES. 37<br />
Date le due sequenze x[ n ] e hn, [ ] rappresentative rispettivamente dell’ingresso e della risposta<br />
impulsiva <strong>di</strong> un sistema LTI, in<strong>di</strong>cando con yn [ ] l’uscita dal sistema:<br />
Calcolare :<br />
[ ]<br />
x n<br />
1<br />
0 1 2 3 4 n<br />
(a) Le auto-correlazioni: Rx [ n ] , Rh [ n ] e Ry [ n ]<br />
(b) La mutua-correlazione Rxy [ n ] .<br />
[ ]<br />
hn<br />
1<br />
0 1<br />
-0.5<br />
2<br />
3 4 n<br />
ES. 38<br />
Disegnare lo schema blocchi <strong>di</strong> un sistema <strong>di</strong> elaborazione del segnale, descrivendo le funzionalità<br />
<strong>di</strong> ciascun blocco.<br />
ES. 39<br />
Descrivere i parametri che caratterizzano un filtro analogico nel dominio del tempo e in quello della<br />
frequenza.<br />
ES. 40<br />
Fornire la definizione <strong>di</strong>:<br />
a) Immagine <strong>di</strong>gitale monocromatica.<br />
b) Dinamica <strong>di</strong> un’immagine.<br />
c) Risoluzione spaziale <strong>di</strong> un’immagine.<br />
ES. 41<br />
Date due sequenze x[ n ] e hn [ ] entrambe <strong>di</strong> lunghezza finita (in generale <strong>di</strong>versa):<br />
a) Fornire la definizione <strong>di</strong> convoluzione lineare e circolare tra x[ n ] e hn, [ ] in<strong>di</strong>candone le<br />
<strong>di</strong>fferenze.<br />
b) Se x[ n ] è l’ingresso ad un filtro FIR <strong>di</strong> risposta impulsiva hn, [ ] mostrare l’impiego della<br />
DFT per il calcolo dell’uscita yn. [ ]<br />
c) Fornire un semplice esempio del punto b).<br />
8
ES. 42<br />
Data un’immagine monocromatica descrivere:<br />
a) il concetto <strong>di</strong> trasformata <strong>di</strong> Fourier bi<strong>di</strong>mensionale dell’immagine.<br />
b) le principali tecniche <strong>di</strong> trattamento delle immagini volte a ridurre il rumore, evidenziandone<br />
i limiti.<br />
c) le tecniche per estrarre i contorni da un’immagine.<br />
ES. 43<br />
Ricavare la con<strong>di</strong>zione <strong>di</strong> stabilità per un sistema LTI tempo-<strong>di</strong>screto.<br />
ES. 44<br />
Nell’ambito della rappresentazione complessa <strong>di</strong> un segnale reale dare la definizione <strong>di</strong>:<br />
a) Segnale analitico nel dominio del tempo e in quello della frequenza.<br />
b) Segnale reale a “banda stretta”.<br />
c) Inviluppo complesso.<br />
ES. 45<br />
Confronto tra filtri IIR e filtri FIR: illustrare vantaggi e svantaggi relativi all’impiego dei due tipi <strong>di</strong><br />
filtro.<br />
ES. 46<br />
Illustrare l’effetto della moltiplicazione <strong>di</strong> un segnale tempo-continuo x () t per una finestra<br />
temporale rettangolare <strong>di</strong> durata NT, dove N è il numero <strong>di</strong> campioni ottenuti campionando x ( t )<br />
con una frequenza <strong>di</strong> campionamento<br />
1<br />
F = , relativamente allo spettro del segnale così ottenuto.<br />
T<br />
ES. 47<br />
Dimostrare che un sistema tempo-<strong>di</strong>screto stabile e causale ha il cerchio unitario nelle sua regione<br />
<strong>di</strong> convergenza.<br />
ES. 48<br />
Illustrare:<br />
a) Il concetto <strong>di</strong> trasformata <strong>di</strong> Fourier bi<strong>di</strong>mensionale.<br />
b) Le principali tecniche <strong>di</strong> trattamento delle immagini volte a ridurre il rumore,<br />
evidenziandone i limiti (per<strong>di</strong>ta <strong>di</strong> risoluzione).<br />
c) Le tecniche per estrarre i contorni da un’immagine.<br />
ES. 49<br />
Descrivere il principio <strong>di</strong> funzionamento <strong>di</strong> un ecografo basato sull’effetto Doppler.<br />
ES. 50<br />
Fornire la definizione <strong>di</strong>:<br />
a) Immagine <strong>di</strong>gitale monocromatica.<br />
b) Dinamica <strong>di</strong> un’immagine.<br />
c) Risoluzione spaziale <strong>di</strong> un’immagine.<br />
ES. 51<br />
Relativamente alla rappresentazione complessa <strong>di</strong> un segnale:<br />
a) Fornire la definizione <strong>di</strong> segnale analitico nel dominio del tempo e della frequenza.<br />
b) Dare la definizione <strong>di</strong> filtro <strong>di</strong> Hilbert e ricavare la risposta impulsiva del filtro.<br />
c) Dato il segnale x( t) = sin ( 2π f0t) ricavare l’espressione del segnale analitico x+ () t .<br />
9
ES. 52<br />
Dato un sistema con ingresso x() t e uscita y( t ) , fornire:<br />
a) Il concetto <strong>di</strong> linearità, <strong>di</strong> tempo invarianza e <strong>di</strong> causalità del sistema.<br />
b) La con<strong>di</strong>zione <strong>di</strong> stabilità del sistema.<br />
ES. 53<br />
Mostrare, nel dominio del tempo, come ottenere il segnale tempo-continuo originale – avente banda<br />
limitata – dati i suoi campioni (presi in modo da evitare l’aliasing) tramite l’interpolatore ideale.<br />
10
