

Show PDF File - robotics - Universidad de Zaragoza
Show PDF File - robotics - Universidad de Zaragoza
Show PDF File - robotics - Universidad de Zaragoza

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
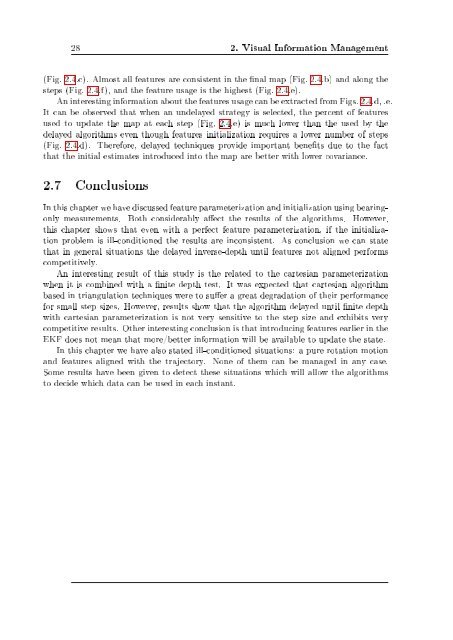
FINAL MAP: INVERSE−DEPTH Delayed (two observations)<br />
F36<br />
F37<br />
F28<br />
F42<br />
F43<br />
F27<br />
F38<br />
F13<br />
F44<br />
F7<br />
F8 F9<br />
F18<br />
F10<br />
F11<br />
F39<br />
F12<br />
F1 F2<br />
F26<br />
F34<br />
F33<br />
F32 F31<br />
F40<br />
F35<br />
F41<br />
F3 F4<br />
F29<br />
F30<br />
F22<br />
F20 F23<br />
F14<br />
F5 F6<br />
−5 0 5 10 15<br />
F25<br />
F24<br />
F21<br />
F19<br />
F17<br />
F16<br />
F15<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
FINAL MAP: INVERSE−DEPTH Delayed Feature not aligned<br />
F28 F27 F26 F25 F24 F23<br />
F34<br />
F17<br />
F33<br />
F40<br />
F32 F31 F30 F29<br />
F22<br />
F35<br />
F36<br />
F37<br />
F38<br />
F41<br />
F42<br />
F43<br />
F44<br />
F7 F8 F9 F10<br />
F18<br />
F11<br />
F39<br />
F12<br />
F1 F2 F3 F4 F5 F6<br />
−5 0 5 10 15<br />
F21<br />
F20<br />
F19<br />
F16<br />
F15<br />
F14<br />
F13<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
FINAL MAP: INVERSE−DEPTH Delayed (Finite <strong>de</strong>pth)<br />
F36<br />
F37<br />
F42<br />
F43<br />
F38<br />
F44<br />
F8<br />
F7<br />
F39<br />
F1 F2<br />
F3<br />
−5 0 5 10 15<br />
<br />
F34<br />
F35<br />
F28<br />
F27<br />
F33<br />
F40<br />
F41<br />
F32<br />
F26<br />
F31<br />
F25<br />
F4<br />
F24<br />
F17<br />
F29<br />
F30<br />
F22<br />
F16<br />
F5<br />
F21<br />
F20<br />
F19<br />
F23<br />
F15<br />
F14<br />
F13<br />
F18<br />
F9 F10<br />
F11<br />
F12<br />
<br />
<br />
% final divergence<br />
number of steps to initialize features<br />
100<br />
4<br />
3<br />
2<br />
1<br />
0<br />
80<br />
60<br />
40<br />
20<br />
0<br />
Final divergence<br />
id−l<br />
id−u<br />
xy−f<br />
0.1250.25 0.5<br />
step size<br />
1<br />
% consistent features<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
Map consistency<br />
id−l<br />
id−u<br />
xy−f<br />
0.1250.25 0.5<br />
step size<br />
1<br />
<br />
Feature initialization step<br />
id−l<br />
id−u<br />
xy−f<br />
0.1250.25 0.5<br />
step size<br />
1<br />
% features used per step<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
Feature usage<br />
id−l<br />
id−u<br />
xy−f<br />
0.1250.25 0.5<br />
step size<br />
1<br />
<br />
% steps divergence<br />
% consistent features per step<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
0.1250.25 0.5<br />
step size<br />
1<br />
F6<br />
Trajectory divergence<br />
id−l<br />
id−u<br />
xy−f<br />
Map consistency per step<br />
id−l<br />
id−u<br />
xy−f<br />
0.1250.25 0.5<br />
step size<br />
1<br />
x<br />
dmin = 0.5m




