CAPITOLO 3 Modelli di Meccanica della Frattura per ... - fisica/mente
CAPITOLO 3 Modelli di Meccanica della Frattura per ... - fisica/mente
CAPITOLO 3 Modelli di Meccanica della Frattura per ... - fisica/mente

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>CAPITOLO</strong> 3<br />
<strong>Modelli</strong> <strong>di</strong> <strong>Meccanica</strong> <strong>della</strong> <strong>Frattura</strong> <strong>per</strong> la Verifica <strong>di</strong> Stabilità<br />
delle Fessure e loro Implementazione agli Elementi Finiti<br />
3.1 Generalità.<br />
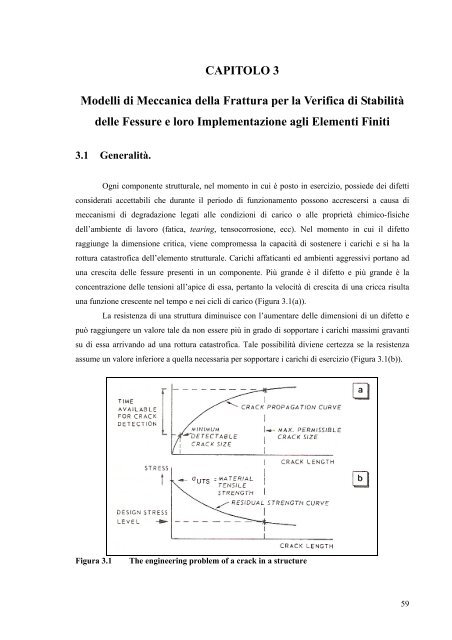
Ogni componente strutturale, nel momento in cui è posto in esercizio, possiede dei <strong>di</strong>fetti<br />
considerati accettabili che durante il <strong>per</strong>iodo <strong>di</strong> funzionamento possono accrescersi a causa <strong>di</strong><br />
meccanismi <strong>di</strong> degradazione legati alle con<strong>di</strong>zioni <strong>di</strong> carico o alle proprietà chimico-fisiche<br />
dell’ambiente <strong>di</strong> lavoro (fatica, tearing, tensocorrosione, ecc). Nel momento in cui il <strong>di</strong>fetto<br />
raggiunge la <strong>di</strong>mensione critica, viene compromessa la capacità <strong>di</strong> sostenere i carichi e si ha la<br />
rottura catastrofica dell’elemento strutturale. Carichi affaticanti ed ambienti aggressivi portano ad<br />
una crescita delle fessure presenti in un componente. Più grande è il <strong>di</strong>fetto e più grande è la<br />
concentrazione delle tensioni all’apice <strong>di</strong> essa, <strong>per</strong>tanto la velocità <strong>di</strong> crescita <strong>di</strong> una cricca risulta<br />
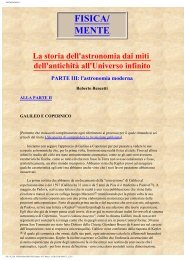
una funzione crescente nel tempo e nei cicli <strong>di</strong> carico (Figura 3.1(a)).<br />
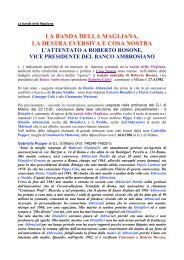
La resistenza <strong>di</strong> una struttura <strong>di</strong>minuisce con l’aumentare delle <strong>di</strong>mensioni <strong>di</strong> un <strong>di</strong>fetto e<br />
può raggiungere un valore tale da non essere più in grado <strong>di</strong> sopportare i carichi massimi gravanti<br />
su <strong>di</strong> essa arrivando ad una rottura catastrofica. Tale possibilità <strong>di</strong>viene certezza se la resistenza<br />
assume un valore inferiore a quella necessaria <strong>per</strong> sopportare i carichi <strong>di</strong> esercizio (Figura 3.1(b)).<br />
Figura 3.1 The engineering problem of a crack in a structure<br />
59
La <strong>Meccanica</strong> <strong>della</strong> <strong>Frattura</strong> deve fornire dei meto<strong>di</strong> e criteri <strong>per</strong> poter dare risposte<br />
quantitative a specifici problemi concernenti la presenza <strong>di</strong> fessure in componenti strutturali e<br />
determinare le seguenti quantità:<br />
• la resistenza residua <strong>della</strong> struttura in funzione delle <strong>di</strong>mensioni <strong>della</strong> cricca;<br />
• le <strong>di</strong>mensioni critiche <strong>di</strong> una fessura (quelle corrispondenti ad una resistenza<br />
residua inferiore a quella necessaria <strong>per</strong> sopportare i carichi <strong>di</strong> esercizio);<br />
• il tempo necessario <strong>per</strong> far crescere una data fessura dalle sue <strong>di</strong>mensioni originali<br />
a quelle critiche;<br />
• le <strong>di</strong>mensioni ammissibili delle cricche ad inizio vita;<br />
• il tempo che deve intercorrere tra una ispezione e l’altra <strong>della</strong> struttura.<br />
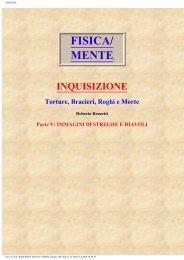
3.2 Concetti base <strong>di</strong> meccanica <strong>della</strong> frattura lineare elastica.<br />
3.2.1 Il criterio energetico.<br />
Nel caso in cui si trascurino i fenomeni <strong>di</strong>ssipativi, il principio <strong>di</strong> conservazione<br />
dell’energia stabilisce che il lavoro F fatto dai carichi esterni che agiscono su un corpo debba<br />
essere trasformato in energia <strong>di</strong> deformazione U :<br />
(3.1) F −U = 0<br />
Il lavoro F compiuto dai carichi esterni vale:<br />
(3.2) F = ∫ Pds<br />
essendo P l’intensità del carico ed s lo spostamento del suo punto <strong>di</strong> applicazione. Nel piano P-s,<br />
tale lavoro è fornito dall’area sottesa dalla curva carico-deformazione. L’energia <strong>di</strong> deformazione<br />
U si calcola effettuando l’integrazione sul volume <strong>della</strong> densità <strong>di</strong> energia. Questa ultima grandezza<br />
è nota una volta conosciuto il tensore delle tensioni σ e quello delle deformazioni ε:<br />
(3.3) Densità <strong>di</strong> energia <strong>di</strong> deformazione = ∫σ ⋅ d ε<br />
Se il corpo presenta una fessura, possono verificarsi due con<strong>di</strong>zioni:<br />
• la fessura non avanza;<br />
• la fessura avanza.<br />
60
Nel primo caso vale ancora l’equazione (2.1). Nel secondo caso, invece, è necessario<br />
correggere l’equazione <strong>di</strong> bilancio (2.1) introducendo un termine che tenga conto <strong>della</strong> quantità <strong>di</strong><br />
energia spesa nella frattura del materiale. Si supponga che la fessura avanzi <strong>di</strong> una quantità<br />
infinitesima da. Se si scrive il bilancio <strong>di</strong> energia facendo riferimento alle variazioni <strong>di</strong> energia che<br />
si hanno nell’avanzamento <strong>della</strong> cricca dalla <strong>di</strong>mensione a a quella a+da , si ottiene la seguente<br />
equazione <strong>di</strong> bilancio:<br />
d<br />
(3.4) ( F −U −W<br />
) = 0<br />
da<br />
che può essere riscritta nella forma:<br />
(3.5)<br />
d<br />
da<br />
( F − U ) =<br />
Il primo membro dell’equazione (3.5) misura, l’energia rilasciata dal sistema quando la fessura<br />
avanza <strong>della</strong> quantità da; il termine a secondo membro, invece, in<strong>di</strong>ca la quantità <strong>di</strong> energia W<br />
necessaria <strong>per</strong> fratturare il materiale <strong>della</strong> quantità da. Questo criterio energetico stabilito da<br />
Griffith nel 1921 afferma che ‘la progazione <strong>di</strong> una qualsivoglia fessura avrà luogo se l’energia<br />
rilasciata dal sistema a seguito dell’incremento <strong>di</strong> lunghezza <strong>della</strong> cricca è sufficiente a fornire<br />
tutta l’energia richiesta <strong>per</strong>ché avvenga tale incremento <strong>di</strong> fessura’. Si può <strong>di</strong>mostrare che il primo<br />
termine dell’equazione (3.5) coincide con l’energia <strong>di</strong> deformazione immagazzinata nel sistema. A<br />
titolo <strong>di</strong> esempio, si considerino i due seguenti casi:<br />
dW<br />
da<br />
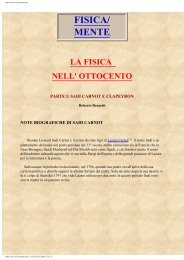
• con<strong>di</strong>zioni <strong>di</strong> controllo <strong>di</strong> spostamento (<strong>di</strong>splacement control), Figura (3.2 (a));<br />
• con<strong>di</strong>zioni <strong>di</strong> controllo <strong>di</strong> carico (load control), Figura (3.2 (b)).<br />
Si assume che in entrambi i casi il materiale possieda un comportamento elastico lineare.<br />
Nel caso <strong>di</strong> controllo <strong>di</strong> spostamento, all’avanzamento <strong>della</strong> fessura corrisponde una<br />
<strong>di</strong>minuzione del carico applicato che passa dal valore P1 al valore P2 (Figura 3.3). L’aumento <strong>della</strong><br />
semilunghezza <strong>della</strong> fessura <strong>della</strong> quantità da, infatti, comporta una <strong>di</strong>minuzione <strong>della</strong> rigidezza del<br />
sistema e lo stesso spostamento può essere mantenuto con un carico applicato inferiore. L’energia<br />
elastica immagazzinata nel sistema <strong>di</strong>minuirà <strong>di</strong> una quantità pari all’area OAB e sarà rappresentata<br />
dal triangolo OBD. In questo caso i carichi esterni applicati alle estremità fisse non compiono<br />
lavoro, <strong>per</strong>tanto la propagazione <strong>della</strong> cricca può avvenire solo a spese <strong>di</strong> un rilascio <strong>di</strong> energia<br />
elastica del sistema.<br />
61
Figura 3.2 Cracked plate at a fixed <strong>di</strong>splacement (a) and at a fixed load (b)<br />
Figura 3.3 Fracturing at costant <strong>di</strong>splacement<br />
Figura 3.4 Fracturing at costant load<br />
62
L’equazione (3.5), <strong>per</strong>tanto, <strong>di</strong>venta:<br />
(3.6)<br />
dU dW dU<br />
− = con < 0<br />
da da da<br />
Nel caso <strong>di</strong> controllo <strong>di</strong> carico, invece, l’avanzamento <strong>della</strong> fessura avviene a carico P1<br />
costante, cui il lavoro F compiuto da tale forza vale P ⋅ δ − δ ) , dato che le estremità <strong>della</strong><br />
1<br />
( 2 1<br />
piastra subiscono lo spostamento δ 2 − δ1<br />
(Figura 3.4), mentre l’energia <strong>di</strong> deformazione<br />
⎛ 1 1 ⎞<br />
immagazzinata dal sistema subisce un incremento pari a ⎜ P 1δ1<br />
− P1δ<br />
2 ⎟ . L’equazione (3.5)<br />
⎝ 2 2 ⎠<br />
assume <strong>per</strong>tanto la seguente forma:<br />
oppure,<br />
(3.7)<br />
(3.8)<br />
⎛ 1 1 ⎞<br />
P 1 ⋅ ( δ 2 − δ1)<br />
− ⎜ P1δ<br />
1 − P1δ<br />
2 ⎟ =<br />
⎝ 2 2 ⎠<br />
1<br />
2<br />
P ( δ − δ ) =<br />
1<br />
2<br />
1<br />
Ancora una volta, il primo membro <strong>della</strong> (3.8) rappresenta la variazione dell’energia <strong>di</strong><br />
deformazione dU da (in questo caso essa risulta positiva in quanto i carichi esterni compiono<br />
lavoro durante la propagazione <strong>della</strong> cricca e quin<strong>di</strong> l’energia elastica del sistema aumenta anziché<br />
<strong>di</strong>minuire), mentre il secondo membro dell’equazione (3.8) coincide con l’energia richiesta <strong>per</strong><br />
avere la frattura del materiale <strong>di</strong> una quantità da, pari all’area OAE.<br />
Si può quin<strong>di</strong> concludere che in<strong>di</strong>pendente<strong>mente</strong> dalle con<strong>di</strong>zioni <strong>di</strong> carico, l’equazione <strong>di</strong><br />
bilancio (3.5) rappresenta il criterio <strong>di</strong> rottura. Il primo membro è chiamato rateo <strong>di</strong> rilascio <strong>di</strong><br />
energia <strong>di</strong> deformazione (strain energy release rate) all’apice <strong>della</strong> fessura o forza motrice <strong>della</strong><br />
fessura (dato che ha le <strong>di</strong>mensioni <strong>di</strong> una forza <strong>per</strong> unità <strong>di</strong> incremento <strong>della</strong> fessura) e viene<br />
in<strong>di</strong>cato con G. Il secondo membro, invece, esprime l’energia necessaria alla propagazione <strong>della</strong><br />
cricca, <strong>per</strong> questo è chiamato resistenza alla fessurazione (fracture resistance) ed in<strong>di</strong>cato con R. Il<br />
criterio <strong>di</strong> rottura espresso dall’equazione (3.5), può essere, allora, riscritto in forma sintetica:<br />
(3.9) G =<br />
R<br />
dW<br />
da<br />
dW<br />
da<br />
63
Nel caso in cui il materiale abbia comportamento elastico lineare, si può <strong>di</strong>mostrare che G è<br />
espresso dalla relazione seguente:<br />
in cui:<br />
(3.10)<br />
⎧<br />
⎪ E<br />
⎪<br />
E'<br />
= ⎨<br />
⎪ E<br />
⎪ 2<br />
⎩1−ν<br />
G =<br />
<strong>per</strong> stato piano <strong>di</strong> tensione<br />
F<br />
2 2<br />
c πσ<br />
E'<br />
<strong>per</strong> stato piano <strong>di</strong> deformazione<br />
E : modulo <strong>di</strong> Young del materiale;<br />
ν : coefficiente <strong>di</strong> Poisson del materiale;<br />
F c : è un fattore che <strong>di</strong>pende dalla geometria considerata e dalle con<strong>di</strong>zioni <strong>di</strong> carico;<br />
σ : è la sollecitazione applicata al corpo in <strong>di</strong>rezione normale alla su<strong>per</strong>ficie <strong>di</strong> frattura;<br />
a : semilunghezza <strong>della</strong> frattura.<br />
Sostituendo la (3.10) nella (3.9), tenendo conto che σ E '=<br />
ε (legge <strong>di</strong> Hook), si ottiene:<br />
2<br />
Fc (3.11) πσεa<br />
= R<br />
L’equazione (3.11), stabilisce il criterio <strong>di</strong> rottura del materiale. Tale criterio, tuttavia,<br />
fornisce risultati corretti sola<strong>mente</strong> se il materiale mantiene un comportamento elastico lineare<br />
(come nel caso <strong>di</strong> materiali fragili o ad alta resistenza) nella zona circostante la fessura. Se il<br />
fenomeno <strong>di</strong> frattura, invece, è accompagnato da notevoli deformazioni plastiche (come avviene<br />
<strong>per</strong> materiali molto duttili), non è più possibile effettuare un’analisi <strong>di</strong> tipo elastico e bisogna far<br />
ricorso agli strumenti messi a <strong>di</strong>sposizione dalla meccanica <strong>della</strong> frattura elasto-plastica (EPFM).<br />
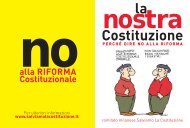
Una rappresentazione grafica del criterio energetico <strong>di</strong> rottura, si ha ponendo in or<strong>di</strong>nata le<br />
grandezze G e R e sud<strong>di</strong>videndo l’asse delle ascisse in due parti, a sinistra dell’origine si pone la<br />
lunghezza delle cricche e a destra si pongono gli incrementi <strong>di</strong> lunghezza delle cricche (Figura 3.5).<br />
Fissando un valore a1 <strong>della</strong> cricca ed una tensione σ2, il valore <strong>di</strong> G è rappresentato dal punto F. Per<br />
la cricca a1, al variare <strong>della</strong> tensione fra 0 e σ2, G varia da O a F. Aumentando la tensione a σ1, G<br />
raggiunge il punto H in cui uguaglia la resistenza a fessurazione, R. La propagazione <strong>della</strong> fessura<br />
sotto tensione σ1 avviene lungo la linea HK in corrispondenza <strong>della</strong> quale G risulta sempre<br />
maggiore <strong>di</strong> R. Una fessura a2>a1, sollecitata da una tensione variabile da 0 a σ2, ha valori <strong>di</strong> G che<br />
a<br />
64
variano da 0 a H (le linee LF e MH corrispondenti allo stesso valore <strong>di</strong> tensione sono parallele); ad<br />
H si ha l’inizio <strong>di</strong> propagazione <strong>della</strong> fessura che proseguirà lungo la linea HN.<br />
Figura 3.5 Graphical representation of instability energy criterion<br />
Il tasso <strong>di</strong> rilascio <strong>di</strong> energia G assume lo stesso valore sia nel caso <strong>di</strong> loa<strong>di</strong>ng control<br />
(estremità libere) sia nel caso <strong>di</strong> <strong>di</strong>splacement control (estremità fisse), ma solo all’inizio <strong>della</strong><br />
propagazione <strong>della</strong> fessura. Nella fase <strong>di</strong> ulteriore accrescimento <strong>della</strong> cricca, l’andamento <strong>di</strong> G è<br />
lineare solo nel caso <strong>di</strong> carico costante mentre nel caso <strong>di</strong> spostamento controllato G può <strong>di</strong>minuire<br />
all’aumentare <strong>di</strong> a, in seguito alla <strong>di</strong>minuzione <strong>della</strong> tensione (G aumenta in funzione <strong>di</strong> a con<br />
legge lineare) (Figura 3.6).<br />
Figura 3.6 Difference in G for fixed grip and costant load con<strong>di</strong>tions beyond instability<br />
La resistenza alla fessurazione R nel caso <strong>di</strong> plane strain risulta in<strong>di</strong>pendente dalla<br />
lunghezza <strong>della</strong> cricca assumendo così il valore costante <strong>di</strong> GIC , mentre s<strong>per</strong>imental<strong>mente</strong> è stato<br />
<strong>di</strong>mostrato che nel caso <strong>di</strong> plane stress essa varia con legge monotona crescente all’aumentare<br />
dell’incremento del <strong>di</strong>fetto (Figura 3.7).<br />
Ponendoci in con<strong>di</strong>zioni <strong>di</strong> plane stress, considerando una cricca a1 e una tensione σ1,<br />
l’energia G è rappresentata dal punto B. Con tensione costante all’avanzamento <strong>della</strong> fessura<br />
l’energia <strong>di</strong> deformazione varia lungo la retta BH, ma essendo i valori <strong>di</strong> G sempre inferiori a R,<br />
non si potrà avere propagazione <strong>della</strong> cricca. La tensione deve aumentare fino a σc, <strong>per</strong> cui la cricca<br />
aumenta assumendo il valore ac e G assume il valore rappresentato dal punto D, <strong>per</strong> il quale si ha la<br />
65
propagazione instabile <strong>della</strong> fessura (la retta DF risulta sempre maggiore <strong>di</strong> R. In D sono verificate<br />
le seguenti relazioni che esprimono il criterio energetico <strong>della</strong> rottura in con<strong>di</strong>zioni <strong>di</strong> stato piano <strong>di</strong><br />
tensione: ∂ ∂a<br />
= ∂R<br />
∂a<br />
e GC = R dove GC è l’energia critica a frattura.<br />
G C<br />
Figura 3.7 Trend of R-curve for plane strain and plain stress<br />
Questo criterio energetico è un ottimo strumento <strong>per</strong> la valutazione del comportamento alla<br />
fessurazione <strong>di</strong> un dato materiale e <strong>di</strong> semplice applicazione. Chiara<strong>mente</strong> la sua messa in pratica<br />
richiede la conoscenza <strong>di</strong> una opportuna espressione analitica <strong>di</strong> R o una sua valutazione <strong>per</strong> via<br />
s<strong>per</strong>imentale. Questo metodo <strong>di</strong> semplice implementazione grafica consente una valutazione del<br />
comportamento post-instabilità <strong>di</strong> una fessura e del suo possibile arresto.<br />
3.2.2 Stato <strong>di</strong> Tensione all’apice <strong>di</strong> una fessura.<br />
Per varie configurazioni <strong>di</strong> <strong>di</strong>fetti soggetti a carichi esterni è possibile ricavare espressioni<br />
semplici e compatte <strong>per</strong> descrivere lo stato <strong>di</strong> sollecitazione nel componente, assumendo un<br />
comportamento del materiale lineare elastico. Definendo un sistema <strong>di</strong> riferimento polare centrato<br />
nell’apice <strong>della</strong> fessura (Figura 3.8), si può <strong>di</strong>mostrare che lo stato <strong>di</strong> tensione è descritto dalla<br />
seguente espressione:<br />
∑<br />
m<br />
∞<br />
= 0<br />
( m)<br />
(3.12) σ = ⎜ ⎟ f ( θ ) + A r 2 g ( θ )<br />
ij<br />
⎛<br />
⎝<br />
K<br />
⎞<br />
r ⎠<br />
ij<br />
in cui, σ ij è il tensore degli stress, r e θ sono definiti in Figura 3.8, K è una costante e f ij è una<br />
funzione a<strong>di</strong>mensionalizzata. I termini <strong>di</strong> or<strong>di</strong>ne più elevato <strong>di</strong>pendono dalla geometria, ma la<br />
soluzione <strong>per</strong> una qualsiasi configurazione <strong>di</strong> <strong>di</strong>fetto è pilotata dal termine proporzionale a 1 r .<br />
Per r → 0 , in prossimità dell’apice, il primo termine tenderà all’infinito mentre gli altri termini<br />
saranno trascurabili. L’equazione (3.12) presenta quin<strong>di</strong> una singolarità in r = 0 .<br />
m<br />
m<br />
ij<br />
66
Figura 3.8 Definition of the coor<strong>di</strong>nate axis ahead of a crack tip<br />
Una fessura contenuta in un materiale può essere sollecitata secondo tre <strong>di</strong>fferenti tipi <strong>di</strong><br />
carico, come illustrato in Figura 3.9:<br />
• Opening mode (Modo I), sono le tensioni normali al piano <strong>della</strong> fessura ad<br />
originare gli spostamenti dei lembi;<br />
• Sli<strong>di</strong>ng mode (Modo II), sono le tensioni tangenziali nel piano <strong>della</strong> fessura stessa<br />
ad originare lo spostamento dei lembi in <strong>di</strong>rezione ortogonale al bordo <strong>di</strong> attacco;<br />
• Tearing mode (Modo III), sono le tensioni tangenziali fuori dal piano <strong>della</strong> fessura<br />
ad originare lo spostamento dei lembi in <strong>di</strong>rezione parallela al bordo <strong>di</strong> attacco.<br />
La sovrapposizione dei tre mo<strong>di</strong> descrive un qualsiasi problema <strong>di</strong> fessurazione.<br />
Figura 3.9 The three modes pf loa<strong>di</strong>ng that cam be applied to a crack<br />
Espressioni dettagliate <strong>della</strong> singolarità dello stato <strong>di</strong> sollecitazione <strong>per</strong> i tre Mo<strong>di</strong> <strong>di</strong> rottura<br />
sono riportati in Tabella 3.1 e Tabella 3.2, mentre le relazioni sugli spostamenti <strong>per</strong> i primi due<br />
mo<strong>di</strong> sono riportati in Tabella 3.3.<br />
Mode I Mode II<br />
σ xx<br />
K I ⎛θ<br />
⎞⎡<br />
⎛θ<br />
⎞ ⎛ 3θ<br />
⎞⎤<br />
cos⎜<br />
⎟⎢1<br />
− sin⎜<br />
⎟sin⎜<br />
⎟⎥<br />
2πr<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠ ⎝ 2 ⎠⎦<br />
−<br />
K II ⎛θ<br />
⎞⎡<br />
⎛θ<br />
⎞ ⎛ 3θ<br />
⎞⎤<br />
sin⎜<br />
⎟⎢2<br />
+ cos⎜<br />
⎟cos⎜<br />
⎟⎥<br />
2πr<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠ ⎝ 2 ⎠⎦<br />
σ yy<br />
K I ⎛θ<br />
⎞⎡<br />
⎛θ<br />
⎞ ⎛ 3θ<br />
⎞⎤<br />
cos⎜<br />
⎟⎢1<br />
+ sin⎜<br />
⎟sin⎜<br />
⎟⎥<br />
2πr<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠ ⎝ 2 ⎠⎦<br />
K II ⎛θ<br />
⎞ ⎛θ<br />
⎞ ⎛ 3θ<br />
⎞<br />
sin⎜<br />
⎟cos⎜<br />
⎟cos⎜<br />
⎟<br />
2πr<br />
⎝ 2 ⎠ ⎝ 2 ⎠ ⎝ 2 ⎠<br />
τ xy<br />
K I ⎛θ<br />
⎞ ⎛θ<br />
⎞ ⎛ 3θ<br />
⎞<br />
cos⎜<br />
⎟sin⎜<br />
⎟cos⎜<br />
⎟<br />
2πr<br />
⎝ 2 ⎠ ⎝ 2 ⎠ ⎝ 2 ⎠<br />
K II ⎛θ<br />
⎞⎡<br />
⎛θ<br />
⎞ ⎛ 3θ<br />
⎞⎤<br />
cos⎜<br />
⎟⎢1<br />
− sin⎜<br />
⎟sin⎜<br />
⎟⎥<br />
2πr<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠ ⎝ 2 ⎠⎦<br />
σ zz<br />
0 (Plane Stress)<br />
ν σ + σ (Plane Strain)<br />
0 (Plane Stress)<br />
ν σ + σ (Plane Strain)<br />
( )<br />
xx<br />
yy<br />
( )<br />
xz<br />
τ , yz<br />
τ 0 0<br />
Tabella 3.1 Stress fields ahead of a crack tip for Mode I and Mode II<br />
xx<br />
yy<br />
67
K III ⎛θ<br />
⎞<br />
τ xz = − sin⎜<br />
⎟<br />
2πr<br />
⎝ 2 ⎠<br />
τ yz =<br />
K III ⎛θ<br />
⎞<br />
cos⎜<br />
⎟<br />
2πr<br />
⎝ 2 ⎠<br />
K III<br />
u z = −<br />
µ<br />
r ⎛θ<br />
⎞<br />
sin⎜<br />
⎟<br />
2π<br />
⎝ 2 ⎠<br />
Tabella 3.2 Non-zero stress and <strong>di</strong>splacement components in Mode III<br />
K I r ⎛θ<br />
⎞⎡<br />
2 ⎛θ<br />
⎞⎤<br />
u x<br />
cos⎜<br />
⎟⎢κ<br />
−1<br />
+ 2sin<br />
⎜ ⎟<br />
2µ<br />
2π<br />
⎥<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠⎦<br />
K I<br />
Mode I Mode II<br />
K II<br />
2µ<br />
r ⎛θ<br />
⎞⎡<br />
sin⎜<br />
⎟⎢κ<br />
+ 1+<br />
2cos<br />
2π<br />
⎝ 2 ⎠⎣<br />
⎛ ⎞⎤<br />
⎜ ⎟⎥<br />
⎝ 2 ⎠⎦<br />
u y<br />
2µ<br />
r ⎛θ<br />
⎞⎡<br />
2 ⎛θ<br />
⎞⎤<br />
sin⎜<br />
⎟⎢κ<br />
+ 1−<br />
2cos<br />
⎜ ⎟<br />
2π<br />
⎥<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠⎦<br />
−<br />
2µ<br />
r ⎛θ<br />
⎞⎡<br />
2⎛ θ ⎞⎤<br />
cos⎜<br />
⎟⎢κ<br />
−1<br />
− 2sin<br />
⎜ ⎟<br />
2π<br />
⎥<br />
⎝ 2 ⎠⎣<br />
⎝ 2 ⎠⎦<br />
Tabella 3.3<br />
µ shear modulus<br />
κ = 3 − 4ν<br />
plane strain<br />
κ = ( 3 −ν<br />
) ( 1−ν<br />
) plane stress<br />
Crack tip <strong>di</strong>splacement fields for Mode I and Mode II<br />
Considerando la sola singolarità generata dal Modo I <strong>di</strong> rottura sul piano contenente la<br />
fessura (θ = 0), le componenti <strong>di</strong> tensione lungo le <strong>di</strong>rezioni x e y sono identiche come risulta dalla<br />
Tabella 3.1:<br />
(3.13)<br />
σ<br />
xx<br />
= σ<br />
yy<br />
=<br />
In Figura 3.10 è schematica<strong>mente</strong> rappresentata la componente normale al piano <strong>della</strong> fessura in<br />
funzione <strong>della</strong> <strong>di</strong>stanza dall’apice <strong>della</strong> fessura. L’equazione (3.13) ha vali<strong>di</strong>tà in prossimità del<br />
<strong>di</strong>fetto in corrispondenza del quale la singolarità 1 r domina il campo <strong>di</strong> tensioni. Le tensioni<br />
lontane dal <strong>di</strong>fetto sono governate dalle con<strong>di</strong>zioni <strong>di</strong> carico applicate in posizione remota al punto<br />
<strong>di</strong> localizzazione <strong>della</strong> fessura, <strong>per</strong> cui la tensione tenderà ad un valore finito ∞<br />
σ (<strong>per</strong> r → ∞<br />
occorre considerare tutti i termini <strong>della</strong> serie (3.12)). Il fattore KI è noto come fattore <strong>di</strong><br />
intensificazione delle tensioni (SIF) <strong>per</strong> il modo <strong>di</strong> rottura I. L’intero stato <strong>di</strong> sollecitazione<br />
all’apice <strong>di</strong> una fessura è univoca<strong>mente</strong> determinato nel momento in cui risulta noto il fattore<br />
<strong>di</strong>mensionale KI. che definisce l’ampiezza <strong>della</strong> singolarità all’apice. Una volta noto questo fattore<br />
è possibile conoscere tensioni, deformazioni e spostamenti come funzione <strong>di</strong> r e θ.<br />
K I<br />
2πr<br />
K II<br />
2 θ<br />
68
Figura 3.10 Stress normal to the crack plane in Mode I<br />
L’utilizzo <strong>di</strong> un singolo parametro <strong>per</strong> caratterizzare gli effetti che una fessura ha su un<br />
dato componente è una delle principali prerogative <strong>della</strong> meccanica <strong>della</strong> frattura. La rottura avrà<br />
luogo allorquando KI raggiunge un valore critico KIC, parametro tipico del materiale in esame<br />
ottenute da prove in stato piano <strong>di</strong> deformazione. In generale il fattore <strong>di</strong> concentrazione delle<br />
tensioni assumerà la seguente espressione:<br />
(3.14) = F σ πa<br />
K I C<br />
in cui F c è un fattore che <strong>di</strong>pende dalla geometria considerata (forma del <strong>di</strong>fetto e sua posizione<br />
nel componente) e dalle con<strong>di</strong>zioni <strong>di</strong> carico. Tramite l’espressione (3.14) è possibile correlare il<br />
fattore <strong>di</strong> intensificazione delle tensioni con il tasso <strong>di</strong> rilascio dell’energia elastica all’apice <strong>della</strong><br />
fessura. Sostituendo la (3.14) nella (3.10) si ottiene:<br />
(3.15)<br />
G<br />
I<br />
⎧<br />
⎪<br />
⎪<br />
= ⎨<br />
⎪<br />
⎪<br />
⎩<br />
2<br />
K I<br />
E<br />
2 ( 1−ν )<br />
In letteratura sono <strong>di</strong>sponibili <strong>di</strong>verse correlazioni del fattore <strong>di</strong> intensificazione in<br />
relazione alla forma del <strong>di</strong>fetto, alla sua posizione nel componente in esame e alle con<strong>di</strong>zioni <strong>di</strong><br />
carico. Per una fessura semiellittica su<strong>per</strong>ficiale, che general<strong>mente</strong> è presa in considerazione in fase<br />
<strong>di</strong> progetto nella normativa ASME III <strong>per</strong> la verifica <strong>di</strong> un componente alla fessurazione, le<br />
correlazioni più atten<strong>di</strong>bili sono risultate quelle <strong>di</strong> Raju & Newman. Su risultati ottenuti agli<br />
elementi finiti riuscirono ad ottenere correlazioni empiriche che fossero in grado <strong>di</strong> descrivere lo<br />
stato <strong>di</strong> sollecitazione lungo il fronte <strong>della</strong> fessura semiellittica (APPENDICE B).<br />
2<br />
K I<br />
E<br />
Plane Stress<br />
Plane Strain<br />
69
La determinazione dello Stress Intensification Factor può essere eseguita tramite il metodo<br />
<strong>della</strong> Weight Function. Tale metodo è basato sul principio <strong>di</strong> sovrapposizione e vale unica<strong>mente</strong><br />
nell’ambito <strong>della</strong> meccanica <strong>della</strong> frattura lineare elastica. Il metodo deriva dall’osservazione che<br />
<strong>di</strong>fferenti con<strong>di</strong>zioni <strong>di</strong> carico possono determinare lo stesso SIF.<br />
Se le equazioni sono lineari possiamo immaginare lo schema <strong>di</strong> sovrapposizione degli effetti<br />
evidenziato nella precedente Figura. Come si nota nella immagine (b) la cricca può essere<br />
virtual<strong>mente</strong> eliminata applicando ai lembi il carico <strong>di</strong> compressione s; tale carico (nella zona in cui<br />
si trova il <strong>di</strong>fetto) è uguale e <strong>di</strong> segno opposto al carico applicato alla piastra senza cricca<br />
(immagine (a)); quest’ultimo carico è detto “carico o tensione nominale”. Si noti che <strong>per</strong> le due<br />
piastre le con<strong>di</strong>zioni al contorno sono le stesse. Il metodo prevede quin<strong>di</strong> che il valore del KI possa<br />
essere determinato con una relazione del tipo in<strong>di</strong>cato:<br />
2a<br />
(3.16) K = H ( x a)<br />
I<br />
∫<br />
0<br />
, ⋅σ<br />
( x)<br />
dx<br />
Nella relazione integrale σ ( x)<br />
è la tensione nominale e ( x a)<br />
H , è una opportuna funzione <strong>della</strong><br />
sola geometria del <strong>di</strong>fetto (in particolare <strong>della</strong> lunghezza a <strong>della</strong> cricca) denominata Weight<br />
Function (WF). Anche in questo caso esistono varie correlazioni in letteratura che consentono <strong>di</strong><br />
definire lo stato <strong>di</strong> tensione all’apice <strong>di</strong> un <strong>di</strong>fetto partendo dalla <strong>di</strong>stribuzione effettiva <strong>della</strong><br />
tensione nel componente integro, privo <strong>di</strong> fessure.<br />
3.2.3 Plasticizzazione all’apice <strong>di</strong> una fessura.<br />
La soluzione elastica dello stato <strong>di</strong> tensione nella zona a<strong>di</strong>acente alla fessura mostra una<br />
<strong>di</strong>scontinuità all’apice <strong>di</strong> essa. Le tensioni tendono all’infinito <strong>per</strong> r tendente a zero ma in realtà la<br />
tensione sarà limitata dalla tensione <strong>di</strong> snervamento del materiale. Pertanto si svilup<strong>per</strong>anno<br />
deformazioni plastiche all’apice <strong>della</strong> fessura tali da generare una completa ri<strong>di</strong>stribuzione delle<br />
tensioni. E’ possibile arrivare ad una stima delle <strong>di</strong>mensioni <strong>di</strong> tale zona plastica considerando i<br />
70
casi <strong>di</strong> stato piano <strong>di</strong> tensione e quello <strong>di</strong> deformazione prendendo a riferimento lo stato <strong>di</strong> tensione<br />
generato in <strong>di</strong>rezione normale al piano contenente la fessura descritto dall’espressione (3.13).<br />
Figura 3.11 A first approximation to the crack tip plastic zone<br />
In con<strong>di</strong>zioni <strong>di</strong> plane stress la con<strong>di</strong>zione <strong>di</strong> snervamento si verifica nel momento in cui la<br />
tensione uniassiale <strong>di</strong> snervamento del materiale uguaglia la componente normale, σ y = σ YS .<br />
Sostituendo la σ YS nell’equazione (3.13) è possibile arrivare alla stima <strong>della</strong> <strong>di</strong>stanza ry dall’apice<br />
<strong>della</strong> fessura in cui la σ y su<strong>per</strong>a la tensione <strong>di</strong> snervamento.<br />
(3.17)<br />
r<br />
y<br />
1 ⎛ K<br />
=<br />
2 ⎜<br />
π ⎝σ<br />
I<br />
YS<br />
Se sono trascurabili gli effetti <strong>di</strong> incru<strong>di</strong>mento del materiale (comportamento elastico <strong>per</strong>fetta<strong>mente</strong><br />
plastico) la <strong>di</strong>stribuzione delle tensioni <strong>per</strong> r ≤ ry<br />
può essere rappresentata da una linea orizzontale<br />
in corrispondenza allo snervamento come illustrato in Figura 3.11. Dalla Figura si evince<br />
chiara<strong>mente</strong> che la procedura adottata non è rigorosa<strong>mente</strong> corretta <strong>per</strong>ché si fonda sull’assunzione<br />
<strong>di</strong> una soluzione elastica. Nel momento in cui si ha lo snervamento, le tensioni dovranno subire una<br />
ri<strong>di</strong>stribuzione <strong>per</strong> sod<strong>di</strong>sfare l’equazione dell’equilibrio globale sul componente. A seguito do ciò<br />
è chiaro che l’effettiva zona plastica dovrà essere più grande <strong>di</strong> ry dal momento che il carico<br />
rappresentato dall’area tratteggiata in Figura 3.11. deve essere in qualche modo equilibrato. Questo<br />
può essere realizzato se si estende la zona plastica in corrispondenza dell’apice <strong>della</strong> fessura come<br />
mostrato in Figura 3.12. Un semplice bilancio <strong>di</strong> force porta alla stima dell’effettiva <strong>di</strong>mensione<br />
<strong>della</strong> regione plastica assunta <strong>di</strong> forma circolare in prima approssimazione:<br />
ry<br />
ry<br />
(3.18) σ<br />
YSr<br />
p = ∫ σ ydr<br />
= ∫<br />
0<br />
0<br />
⎞<br />
⎟<br />
⎠<br />
2<br />
K I<br />
dr<br />
2πr<br />
71
da cui:<br />
(3.19)<br />
r<br />
p<br />
1 ⎛ K<br />
=<br />
⎜<br />
π ⎝σ<br />
I<br />
YS<br />
⎞<br />
⎟<br />
⎠<br />
2<br />
quin<strong>di</strong> rp = 2ry<br />
Figura 3.12 First-order and second-order estimates of plastic zone size<br />
Riferendoci alla Figura 3.12, si può notare che la ri<strong>di</strong>stribuzione <strong>della</strong> tensione nella zona elastica è<br />
più alta <strong>di</strong> quella predetta dall’equazione (3.13), richiedendo un più alto fattore <strong>di</strong> concentrazione<br />
delle tensioni, Keff. Irwin <strong>di</strong>mostrò che la plasticizzazione può essere considerata come un<br />
incremento fittizio delle <strong>di</strong>mensioni <strong>della</strong> cricca, Figura 3.13. La plasticizzazione all’apice <strong>della</strong><br />
cricca determina deformazioni maggiori e rigidezza minori rispetto al caso elastico, il componente<br />
strutturale si comporta come se essa contenesse una fessura <strong>di</strong> <strong>di</strong>mensioni maggiori rispetto a<br />
quelle reali. Irwin <strong>di</strong>mostrò che una buona approssimazione del Keff è ottenuta ponendo l’apice<br />
dell’effettiva fessura considerata nel centro <strong>della</strong> regione <strong>di</strong> plasticizzazione. In definitiva la<br />
lunghezza effettiva <strong>della</strong> cricca risulta:<br />
(3.20) a eff = a + ry<br />
il valore dell’effettivo fattore <strong>di</strong> intensificazione degli sforzi è ottenuto inserendo la <strong>di</strong>mensione<br />
effettiva <strong>della</strong> fessura nell’espressione generale (3.14):<br />
K = F a σ πa<br />
(3.21) eff C ( eff ) eff<br />
un processo iterativo sarà necessario <strong>per</strong> ottenere il valore esatto partendo dal SIF calcolato in<br />
assenza <strong>di</strong> plasticizzazione; tramite le equazioni (3.17) e (3.20) sarà possibile riaggiornale le<br />
<strong>di</strong>mensioni del <strong>di</strong>fetto e continuare ad iterare <strong>per</strong> arrivare a convergenza.<br />
72
Figura 3.13 The Irwin plastic zone correction<br />
In con<strong>di</strong>zioni <strong>di</strong> stato piano <strong>di</strong> deformazione lo snervamento è raggiunto con uno stato<br />
triassiale <strong>di</strong> tensione e in definitiva la correzione <strong>della</strong> zona <strong>di</strong> plasticizzazione sarà più piccola <strong>di</strong><br />
un fattore pari a tre:<br />
(3.22)<br />
r<br />
y<br />
1 ⎛ K<br />
=<br />
6 ⎜<br />
π ⎝σ<br />
I<br />
YS<br />
Per stimare la <strong>di</strong>mensione <strong>della</strong> zona in cui si ha la plasticizzazione del materiale all’apice<br />
del <strong>di</strong>fetto si è considerato solo lo stato <strong>di</strong> tensione che si ha <strong>per</strong> θ = 0, lungo il piano <strong>della</strong> fessura.<br />
E’ possibile stimare l’estensione <strong>della</strong> regione plasticizzata <strong>per</strong> tutti i valori <strong>di</strong> angolo <strong>di</strong><br />
inclinazione applicando un opportuno criterio <strong>di</strong> snervamento unito alle equazioni riportate nelle<br />
Tabelle 3.1-3.2. Consideriamo il classico criterio <strong>di</strong> Von Mises <strong>per</strong> definire i limiti <strong>della</strong> regione <strong>di</strong><br />
snervamento:<br />
dove, e<br />
1<br />
[ ] 2<br />
1<br />
2<br />
2<br />
2<br />
(3.23) σ = ( σ − σ ) + ( σ −σ<br />
) + ( σ −σ<br />
)<br />
e<br />
2<br />
σ è la tensione equivalente e 1 σ 2 3<br />
1<br />
2<br />
1<br />
3<br />
⎞<br />
⎟<br />
⎠<br />
2<br />
2<br />
3<br />
σ , , σ sono le tre componenti principali del tensore degli<br />
sforzi. Secondo il criterio <strong>di</strong> Von Mises, lo snervamento ha inizio nel momento in cui è verificata<br />
l’uguaglianza tra σ e = σ YS . Sostituendo, <strong>per</strong> esempio, lo stato <strong>di</strong> tensione del Modo I <strong>di</strong> rottura,<br />
riportato in Tabella 3.1, nell’equazione precedente e risolvendo in r, si ottiene la stima del raggio<br />
<strong>della</strong> zona snervata in funzione dell’angolo θ.<br />
r θ =<br />
1 ⎛ K I ⎜<br />
⎞<br />
⎟<br />
⎡ 3 2 ⎤<br />
1+<br />
cosθ<br />
+ sin θ<br />
<strong>per</strong> plane stress<br />
⎝ YS ⎠<br />
(3.24) y ( )<br />
4π<br />
⎜σ<br />
⎟ ⎢<br />
⎥<br />
⎣ 2 ⎦<br />
2<br />
73
2<br />
r θ =<br />
1 ⎛ K I ⎜<br />
⎞<br />
⎟<br />
⎡ 2<br />
1−<br />
2ν<br />
3 2 ⎤<br />
1+<br />
cosθ<br />
+ sin θ <strong>per</strong> plane strain<br />
⎝ YS ⎠<br />
(3.25) y ( ) ( ) ( )<br />
4π<br />
⎜σ<br />
⎟ ⎢<br />
⎥<br />
⎣<br />
2 ⎦<br />
Le equazioni (3.24) e (3.25), rappresentate in Figura 3.14 e Figura 3.15, definiscono<br />
approssimativa<strong>mente</strong> il confine tra il comportamento elastico e quello plastico del materiale. Le<br />
precedenti equazioni non sono tuttavia rigorosa<strong>mente</strong> corrette <strong>per</strong>ché si fondano su un’analisi<br />
pura<strong>mente</strong> elastica non considerando la ri<strong>di</strong>stribuzione delle tensioni.<br />
Figura 3.14 Effect of thickness on plastic zone shape<br />
Figura 3.15 Dimensionless plastic zone shapes from the Von Mises yield criterion<br />
74
3.3 Concetti base <strong>di</strong> meccanica <strong>della</strong> frattura elasto-plastica.<br />
3.3.1 Il criterio energetico.<br />
Per i materiali duttili è presente una deformazione plastica all’apice <strong>della</strong> fessura. Per<br />
questi materiali la propagazione <strong>di</strong> un <strong>di</strong>fetto richiede la formazione <strong>di</strong> una zona plastica al nuovo<br />
apice. L’energia associata a tale plasticizzazione può essere considerata l’energia necessaria <strong>per</strong> la<br />
propagazione <strong>della</strong> fessura. Per questi motivi la resistenza alla fessurazione R è essenzial<strong>mente</strong><br />
l’energia <strong>di</strong> deformazione plastica mentre il contributo <strong>di</strong> energia <strong>per</strong> la formazione delle su<strong>per</strong>fici<br />
<strong>di</strong> frattura risulta pratica<strong>mente</strong> trascurabile.<br />
Se il fenomeno <strong>di</strong> frattura, invece, è accompagnato da notevoli deformazioni plastiche<br />
(come avviene <strong>per</strong> materiali molto duttili), non è più possibile effettuare un’ analisi <strong>di</strong> tipo elastico<br />
e bisogna far ricorso agli strumenti messi a <strong>di</strong>sposizione dalla meccanica <strong>della</strong> frattura elastoplastica<br />
(EPFM). In EPFM, il criterio <strong>di</strong> rottura del materiale è fornito da una relazione<br />
formal<strong>mente</strong> simile alla (3.11):<br />
(3.26) H σε a = J R<br />
dove H è un fattore (detto funzione <strong>di</strong> influenza) che riveste lo stesso ruolo del termine F π<br />
nell’equazione (3.11) (e <strong>di</strong>pende oltre che dalla geometria e dalle con<strong>di</strong>zioni <strong>di</strong> carico anche dalle<br />
proprietà del materiale) e JR rappresenta la resistenza alla frattura del materiale. In EPFM, inoltre,<br />
la forza motrice <strong>della</strong> fessura si in<strong>di</strong>ca con J anziché con G, <strong>per</strong> cui la relazione (3.26) può<br />
assumere la forma equivalente riportata <strong>di</strong> seguito:<br />
(3.27) J = J R<br />
l’equazione (3.27) riveste lo stesso ruolo <strong>della</strong> (3.9).<br />
Per poter impiegare l’equazione (3.27) in analisi <strong>di</strong> meccanica <strong>della</strong> frattura elasto-plastica,<br />
è necessario conoscere il legame esistente tra σ ed ε <strong>per</strong> il materiale in esame. In linea <strong>di</strong> principio,<br />
tale legame può essere descritto da qualsiasi relazione in grado <strong>di</strong> rappresentare l’andamento <strong>della</strong><br />
curva s<strong>per</strong>imentale tensione-deformazione del materiale. Tuttavia, nella maggior parte dei casi, si<br />
effettua il fit <strong>della</strong> curva s<strong>per</strong>imentale ricorrendo ad una legge <strong>di</strong> potenza nota come legge <strong>di</strong><br />
Ramberg-Osgood (R-O), (cfr. Paragrafo 3.3.3).<br />
(3.28)<br />
n<br />
σ σ<br />
ε =<br />
+<br />
E F<br />
2<br />
c<br />
75
A questo punto, sfruttando il legame tra tensioni e deformazioni fornito dalla relazione <strong>di</strong> R-O, è<br />
possibile riformulare il criterio <strong>di</strong> rottura fornito dall’equazione (3.26) nel modo seguente:<br />
n+1<br />
σ σ<br />
(3.29) H σε a = H a + H a = J R<br />
E F<br />
2<br />
Il primo termine a primo membro dell’equazione (3.29), rappresenta il contributo alla variazione <strong>di</strong><br />
energia <strong>di</strong> deformazione dovuto alla parte lineare <strong>della</strong> curva tensione-deformazione (il confronto<br />
con l’espressione <strong>di</strong> G fornita dal primo membro <strong>della</strong> equazione (3.10), in<strong>di</strong>ca che nel caso<br />
elastico n=1, F=E’ e<br />
2<br />
C<br />
H = πF<br />
), mentre il secondo termine a primo membro dell’equazione (3.29)<br />
rappresenta il contributo alla variazione <strong>di</strong> energia <strong>di</strong> deformazione dovuto alla parte non-lineare<br />
<strong>della</strong> curva tensione-deformazione. Tenendo conto <strong>della</strong> (3.10), la (3.29) <strong>di</strong>venta:<br />
n+1<br />
Fc<br />
πσ a Hσ<br />
a<br />
(3.30) + = J R<br />
E'<br />
F<br />
2<br />
2<br />
In EPFM, il secondo termine a primo membro <strong>della</strong> (3.30) viene in<strong>di</strong>cato con Jpl, dove pl sta ad<br />
in<strong>di</strong>care la componente plastica del J, <strong>per</strong> cui la relazione precedente può essere riscritta nella<br />
forma seguente:<br />
(3.31) G + J pl = J R<br />
Inoltre, è uso comune porre G=Jel, dove el sta ad in<strong>di</strong>care la componente elastica del J <strong>per</strong> cui<br />
l’equazione (3.31) <strong>di</strong>venta:<br />
(3.32) J el + J pl = J R<br />
General<strong>mente</strong> si pone J=Jel+Jpl. La relazione (3.31) costituisce il criterio <strong>di</strong> frattura impiegato in<br />
EPFM. Tuttavia, <strong>per</strong> risolvere la (3.30), è necessario <strong>di</strong>sporre <strong>di</strong> una relazione che descriva la<br />
tenacità alla frattura del materiale determinata general<strong>mente</strong> <strong>per</strong> via s<strong>per</strong>imentale. Nel caso in cui<br />
Jel sia molto più piccolo <strong>di</strong> Jpl il primo termine dell’equazione (3.30) può essere trascurato e la<br />
tensione <strong>di</strong> frattura può essere calcolata <strong>di</strong>retta<strong>mente</strong>:<br />
(3.33)<br />
⎛ FJ R ⎞<br />
σ<br />
f = ⎜ ⎟<br />
⎝ Ha ⎠<br />
1 +<br />
( n 1)<br />
76
mentre nel caso elastico risulta:<br />
(3.34)<br />
σ<br />
f<br />
⎛ ' ⎞<br />
⎜<br />
E R<br />
= ⎟<br />
⎜ 2 ⎟<br />
⎝ πFC<br />
a ⎠<br />
in accordo al criterio energetico <strong>per</strong> materiale a comportamento pura<strong>mente</strong> lineare (cfr. Paragrafo<br />
3.3.1). I fattori geometrici FC e H, in<strong>di</strong>spensabili <strong>per</strong> poter risolvere qualsiasi problema <strong>di</strong><br />
meccanica <strong>della</strong> frattura, si possono calcolare utilizzando opportune relazioni <strong>di</strong>sponibili in<br />
letteratura. Il fattore geometrico elastico FC è stato calcolato <strong>per</strong> varie geometrie e con<strong>di</strong>zioni <strong>di</strong><br />
carico e su espressioni sono riportate in vari manuali. Il fattore geometrico plastico <strong>di</strong>pende oltre<br />
che dalla geometria in esame e dalle con<strong>di</strong>zioni <strong>di</strong> carico, dall’esponente n dell’equazione <strong>di</strong> R-O.<br />
Per i materiali molto duttili, la resistenza alla frattura JR tende a crescere durante l’evolversi<br />
del processo <strong>di</strong> frattura (Figura 3.16). Questo fatto consente l’avvio <strong>di</strong> fenomeni <strong>di</strong> frattura stabile,<br />
dato che la fessura è costretta ad arrestare la sua avanzata nel momento in cui la forza motrice<br />
<strong>di</strong>venta più piccola dell’energia necessaria alla frattura JR. La frattura può, quin<strong>di</strong>, crescere<br />
lenta<strong>mente</strong> e stabil<strong>mente</strong> fino al raggiungimento <strong>di</strong> una con<strong>di</strong>zione critica in cui si verifica una<br />
propagazione rapi<strong>di</strong>ssima ed incontrollabile. Il fenomeno <strong>di</strong> crescita <strong>della</strong> frattura ha inizio nel<br />
momento in cui J = J R . Perfino in EPFM il criterio energetico può essere opportuna<strong>mente</strong><br />
rappresentato <strong>per</strong> via grafica. Fissata la <strong>di</strong>mensione <strong>della</strong> fessura, è possibile <strong>di</strong>segnare una famiglia<br />
<strong>di</strong> curve variando la tensione σ nell’equazione (3.30), come illustrato nella seguente Figura.<br />
Figura 3.16 J-curves for <strong>di</strong>fferent stresses and typical trend of JR-curve<br />
1<br />
2<br />
77
Alla tensione σa il valore <strong>di</strong> J(a) è quello corrispondente al punto A. Quest’ultimo si trova più in<br />
basso del punto B e quin<strong>di</strong> J risulta minore <strong>di</strong> JR. La frattura non può avanzare. Un innalzamento<br />
<strong>della</strong> tensione al valore σi, porta J(a) al punto B. Adesso J=JR e la cricca può propagare. Ma essa è<br />
stabile, dato che, se la tensione rimane pari al valore σi, J si porta in C e JR in D e l’avanzamento<br />
<strong>della</strong> fessura deve arrestarsi. Affinché la frattura possa avanzare è necessario portare la<br />
sollecitazione a σb , in modo da spostare il valore <strong>di</strong> J(a) nel punto D. In questa fase la cricca cresce<br />
stabil<strong>mente</strong> da a ad a+∆ab . Ulteriori incrementi <strong>di</strong> tensione comportano una crescita stabile <strong>della</strong><br />
cricca, <strong>per</strong> cui il processo <strong>di</strong> frattura risulta ancora sotto controllo. In questa fase è sufficiente<br />
mantenere la sollecitazione costante <strong>per</strong> scongiurare una rottura catastrofica del componente. Nel<br />
caso in cui, <strong>per</strong>ò, la sollecitazione raggiunga σfr , J(a) si porta in E e la frattura può propagarsi in<br />
maniera instabile. Ad un ulteriore incremento <strong>della</strong> cricca, infatti, J continua a mantenersi più<br />
elevato <strong>di</strong> JR. La con<strong>di</strong>zione <strong>di</strong> instabilità, quin<strong>di</strong>, si verifica nel momento in cui si raggiunge una<br />
con<strong>di</strong>zione <strong>di</strong> tangenza tra la curva J(a) e la curva JR :<br />
(3.35)<br />
⎧ J<br />
⎪<br />
⎨⎛<br />
dJ ⎞<br />
⎜ ⎟<br />
⎪<br />
⎩⎝<br />
da ⎠<br />
( a ) = J ( a )<br />
i<br />
a<br />
i<br />
R<br />
⎛ dJ R ⎞<br />
= ⎜ ⎟<br />
⎝ da ⎠<br />
Il sistema <strong>di</strong> equazioni (3.35) è frequente<strong>mente</strong> riportato in letteratura in una forma <strong>di</strong>versa.<br />
Moltiplicando ambo i membri <strong>della</strong> seconda equazione <strong>per</strong><br />
del materiale e σ YS è la tensione <strong>di</strong> snervamento, si ottiene:<br />
(3.36)<br />
E dJ E dJ R<br />
=<br />
2<br />
2<br />
σ da σ da<br />
YS<br />
YS<br />
i<br />
a<br />
i<br />
2<br />
E σ YS , dove E è il modulo <strong>di</strong> Young<br />
in cui, il primo membro viene comune<strong>mente</strong> in<strong>di</strong>cato con Tapp, applied tearing modulus, mentre il<br />
secondo con TR, dove il pe<strong>di</strong>ce R in<strong>di</strong>ca il valore <strong>di</strong> J sulla curva <strong>di</strong> resistenza alla fessurazione. In<br />
Figura 3.17 viene schematica<strong>mente</strong> illustrata una tipica curva JR <strong>per</strong> materiali a comportamento non<br />
lineare. Nei primi istanti <strong>della</strong> deformazione all’apice <strong>di</strong> un <strong>di</strong>fetto, la curva R è pressoché verticale.<br />
Come aumenta il valore <strong>di</strong> J, il materiale all’apice inizia local<strong>mente</strong> a fessurarsi e il <strong>di</strong>fetto avanza.<br />
Dal momento che l’andamento <strong>di</strong> R è monotono crescente, l’iniziale avanzamento del <strong>di</strong>fetto è<br />
stabile ma con<strong>di</strong>zioni <strong>di</strong> instabilità possono essere incontrati con incrementi <strong>di</strong> carico. L’in<strong>di</strong>ce <strong>di</strong><br />
misura <strong>della</strong> tenacità a frattura, JIC, è definito in prossimità del punto <strong>di</strong> inizio crescita <strong>della</strong><br />
frattura. Questo in<strong>di</strong>ce ci fornisce alcune informazioni sul comportamento a frattura <strong>di</strong> un materiale<br />
duttile. La pendenza <strong>della</strong> curva ad un dato valore dell’estensione del <strong>di</strong>fetto è un in<strong>di</strong>ce <strong>della</strong><br />
relativa stabilità del fenomeno <strong>di</strong> avanzamento; in un materiale con una ripida curva risulterà meno<br />
78
probabile una propagazione instabile <strong>della</strong> cricca. E’ proprio il fattore <strong>di</strong>mensionale TR a<br />
quantificare la pendenza <strong>della</strong> curva <strong>di</strong> resistenza alla fessurazione.<br />
Figura 3.17 Schematic J resistance curve for a ductile material<br />
Le con<strong>di</strong>zioni che governano la stabilità nei materiali elasto-plastici sono virtual<strong>mente</strong><br />
identici al caso elastico presentato nel paragrafo 3.3.1. La instabilità si verifica nel momento in cui<br />
l’andamento <strong>della</strong> driving force J risulta tangente alla R-curve. La con<strong>di</strong>zione <strong>di</strong> load control (la<br />
sollecitazione non <strong>di</strong>minuisce una volta che la frattura inizia a propagarsi) general<strong>mente</strong> risulta<br />
meno stabile <strong>della</strong> con<strong>di</strong>zione <strong>di</strong>splacement control, dal momento che in quest’ultima situazione<br />
una crescita <strong>della</strong> fessura è accompagnata da una <strong>di</strong>minuzione dello stato <strong>di</strong> tensione e quin<strong>di</strong> può<br />
accadere che la forza motrice <strong>di</strong>venti minore <strong>della</strong> forza resistente JR causando l’arresto<br />
dell’accrescimento <strong>della</strong> fessura.. In controllo <strong>di</strong> spostamento, quin<strong>di</strong>, il fenomeno <strong>di</strong> instabilità è<br />
influenzato anche dalle proprietà del sistema in esame. In definitiva la con<strong>di</strong>zione <strong>di</strong> una<br />
propagazione stabile è espressa dalle seguenti relazioni:<br />
(3.37) J = J R e Tapp ≤ TR<br />
La propagazione instabile si verifica quando:<br />
(3.38) T app > TR<br />
La curva JR è solita<strong>mente</strong> ricavata sottoponendo campioni del materiale in esame a prove <strong>di</strong><br />
Compact Tension. Essa può essere conveniente<strong>mente</strong> schematizzata utilizzando la legge <strong>di</strong> potenza<br />
seguente:<br />
79
dove:<br />
(3.39) ( ∆ a)<br />
m<br />
⎛ ∆a<br />
⎞<br />
J R = J IC + C⎜<br />
⎟<br />
⎝ r ⎠<br />
∆ a è la variazione <strong>di</strong> lunghezza <strong>della</strong> cricca durante la fase <strong>di</strong> accrescimento;<br />
J IC è la tenacità <strong>di</strong> inizio frattura;<br />
C, m sono parametri ricavati da un fit dei dati s<strong>per</strong>imentali;<br />
r è un parametro <strong>di</strong> normalizzazione.<br />
3.3.2 Il J-Integral.<br />
Il tasso <strong>di</strong> rilascio <strong>di</strong> energia <strong>di</strong> deformazione in materiali a comportamento non lineare può<br />
essere univoca<strong>mente</strong> identificato da un integrale <strong>di</strong> linea lungo un <strong>per</strong>corso qualsiasi che racchiude<br />
l’apice <strong>di</strong> una fessura. Rice fu il primo ad applicare il metodo <strong>di</strong> integrazione su un contorno a<br />
problemi <strong>di</strong> meccanica <strong>della</strong> frattura e giunse a <strong>di</strong>mostrare che quell’integrale, chiamato J, era <strong>per</strong><br />
l'appunto il tasso <strong>di</strong> rilascio <strong>di</strong> energia in componenti ad elasticità non lineare contenenti <strong>di</strong>fetti.<br />
Come vedremo nel seguente paragrafo il J è anche un parametro che caratterizza univoca<strong>mente</strong> lo<br />
stato <strong>di</strong> tensione e deformazione, comportandosi come parametro <strong>di</strong> concentrazione delle tensioni.<br />
Consideriamo il seguente integrale:<br />
essendo:<br />
⎛ ∂ui<br />
⎞<br />
(3.40) J = ∫ ⎜Wdy<br />
− T ds⎟<br />
Γ<br />
i<br />
⎝ ∂x<br />
⎠<br />
Γ tracciato chiuso <strong>per</strong>corso in senso antiorario che racchiude l’apice <strong>della</strong> cricca (Figura 3.18 (A));<br />
T = σ n la componente i-esima del tensore degli sforzi <strong>di</strong>retto secondo la normale esterna;<br />
i<br />
ij<br />
j<br />
u i la componente i-esima del vettore spostamento;<br />
ds un elemento infinitesimo del tracciato Γ;<br />
W<br />
∫<br />
ε<br />
= ij<br />
0<br />
σ<br />
ij d<br />
ε<br />
ij<br />
l’energia <strong>di</strong> deformazione <strong>per</strong> unità <strong>di</strong> volume.<br />
Rice arrivò a <strong>di</strong>mostrare che il valore del J integral è in<strong>di</strong>pendente dal tracciato <strong>di</strong> integrazione<br />
scelto attorno all’apice, basandosi sulla proprietà <strong>di</strong> J <strong>di</strong> essere nullo <strong>per</strong> ogni contorno chiuso Γ.<br />
80
Figura 3.18 Contour integrals. (A) Elastic body; (B) Body with crack; (C) Path<br />
independence contour<br />
Consideriamo un contorno chiuso ABCDEFA intorno all’apice <strong>di</strong> una fessura (Figura 3.18<br />
(B)). Sui lati CD e FA, che costituiscono i lembi <strong>della</strong> cricca, il tensore T è nullo e dy=0 (il <strong>di</strong>fetti si<br />
considerano appuntiti), <strong>per</strong>tanto il contributo <strong>di</strong> queste parti all’integrale risulta nullo. Il contributo<br />
<strong>di</strong> ABC=Γ1 deve essere uguale e contrario al contributo <strong>di</strong> FED=Γ2 ,<strong>per</strong> la proprietà suddetta<br />
dell’integrale J. Ciò significa che se l’integrale J è calcolato su Γ1, il suo valore è identico a quello<br />
ottenibile calcolandolo su Γ2 con <strong>di</strong>rezione antioraria. Ossia<br />
J Γ = J Γ , l’integrale è in<strong>di</strong>pendente<br />
dal <strong>per</strong>corso, <strong>per</strong>ché le estremità sono sui lembi <strong>della</strong> cricca (Figura 3.18 (C).<br />
Nel caso <strong>di</strong> materiale a comportamento lineare elastico, il J integral può essere valutato<br />
considerando la soluzione elastica del campo <strong>di</strong> tensione all’apice <strong>della</strong> fessura. Rice <strong>di</strong>mostrò che<br />
il suddetto integrale è uguale al tasso <strong>di</strong> rilascio <strong>di</strong> energia elastica G.<br />
(3.41)<br />
J = G = −<br />
dU<br />
da<br />
<strong>per</strong> il caso elastico il J può essere messo in relazione al fattore <strong>di</strong> intensificazione delle tensioni<br />
come nelle (3.15) <strong>per</strong> il Modo I <strong>di</strong> carico:<br />
(3.42)<br />
⎧<br />
⎪<br />
⎪<br />
J = ⎨<br />
⎪<br />
⎪<br />
⎩<br />
2<br />
K I<br />
E<br />
2 ( 1−ν )<br />
2<br />
K I<br />
E<br />
1<br />
Plane Stress<br />
Plane Strain<br />
2<br />
81
L’integrale J è <strong>per</strong>tanto una relazione generalizzata del rilascio <strong>di</strong> energia dovuta alla<br />
propagazione <strong>della</strong> cricca ed è valido anche se c’è una apprezzabile plasticizzazione all’apice <strong>di</strong><br />
essa. Infatti essendo J in<strong>di</strong>pendente dal <strong>per</strong>corso <strong>di</strong> integrazione, questo può essere scelto<br />
conveniente<strong>mente</strong> (ad esempio lungo gli spigoli del provino) in zone in cui la soluzione è<br />
certa<strong>mente</strong> elastica. L’integrale J è uno strumento relativa<strong>mente</strong> semplice <strong>per</strong> caratterizzare<br />
univoca<strong>mente</strong> il comportamento <strong>di</strong> un materiale duttile in presenza <strong>di</strong> <strong>di</strong>fetti e <strong>per</strong>mette <strong>di</strong> definire<br />
in tal modo un criterio <strong>di</strong> stabilità o meno alla propagazione.<br />
3.3.3 Stato <strong>di</strong> Tensione all’apice <strong>di</strong> una fessura.<br />
Il parametro energetico J può essere usato anche <strong>per</strong> caratterizzare lo stato <strong>di</strong> tensione in<br />
prossimità <strong>di</strong> una fessura nei materiali elasto-plastici. L’utilizzo <strong>di</strong> questo parametro come un<br />
fattore <strong>di</strong> concentrazione delle tensioni è da attribuire a Hutchinson, Rice e Rosengren.<br />
Per descrivere il comportamento non lineare dei materiali duttili assunsero una legge <strong>di</strong><br />
potenza tra tensioni e deformazioni plastiche simile a quella mostrata nell’equazione (3.28) dove il<br />
primo termine a secondo membro rappresenta la componente elastica <strong>di</strong> deformazione ε el<br />
(contributo elastico dovuto alla legge <strong>di</strong> Hook), mentre il secondo termine a secondo membro<br />
rappresenta la componente plastica ε pl <strong>di</strong> deformazione. L’impiego dell’equazione (3.28)<br />
<strong>per</strong>mette <strong>di</strong> ottenere dei fits accurati <strong>della</strong> curva s<strong>per</strong>imentale tensione-deformazione <strong>per</strong> materiali<br />
incrudenti. La legge <strong>di</strong> Ramberg-Osgood (R-O) costituisce un’estensione <strong>di</strong> tale legge che <strong>per</strong>mette<br />
<strong>di</strong> mo<strong>della</strong>re anche la regione plastica <strong>della</strong> curva tensione-deformazione. Nella legge R-O, la<br />
deformazione plastica del materiale è espressa dalla relazione seguente:<br />
(3.43)<br />
n<br />
σ<br />
ε pl =<br />
F<br />
in cui il termine n è chiamato “strain hardening exponent”, F prende il nome <strong>di</strong> modulo plastico.<br />
L’equazione R-O è stata sviluppata <strong>per</strong> descrivere il legame esistente tra tensioni e<br />
deformazioni effettive del materiale; tuttavia tale relazione può essere utilizzata anche <strong>per</strong><br />
descrivere il legame tra tensioni e deformazioni ingegneristiche purchè il campo <strong>di</strong> vali<strong>di</strong>tà rientri<br />
nei limiti del valore massimo <strong>della</strong> tensione ingegneristica. In letteratura è possibile trovare forme<br />
<strong>di</strong>verse <strong>per</strong> l’equazione (3.28) <strong>di</strong> R-O [28]; <strong>di</strong> seguito si riporta l’espressione più comune<strong>mente</strong><br />
utilizzata <strong>per</strong> descrivere il campo <strong>di</strong> tensione:<br />
(3.44)<br />
ε<br />
ε<br />
O<br />
=<br />
n<br />
σ ⎛ σ ⎞<br />
+ α ⎜<br />
⎟<br />
σ O ⎝σ<br />
O ⎠<br />
82
in cui, σ O è la tensione presa a riferimento che <strong>di</strong> solito è assunta pari a quella <strong>di</strong> snervamento,<br />
σ ; ε = σ E ; α è una costante a<strong>di</strong>mensionale; n è l’esponente <strong>di</strong> deformazione plastica.<br />
YS<br />
O<br />
O<br />
Hutchinson, Rice e Rosengren <strong>di</strong>mostrarono che sia le tensioni che le deformazioni devono<br />
avere un andamento 1 r in prossimità dell’apice <strong>di</strong> una fessura <strong>per</strong> garantire l’in<strong>di</strong>pendenza dal<br />
tracciato considerato <strong>per</strong> il J-integral. Nelle vicinanze <strong>di</strong> un <strong>di</strong>fetto, ben all’interno <strong>della</strong> regione<br />
plastica, le deformazioni elastiche sono trascurabili dato che il loro contributo alla deformazione<br />
totale è piccolo, in tal modo la relazione tra tensioni e deformazioni si riduce ad una semplice legge<br />
<strong>di</strong> potenza come la (3.44). Queste due con<strong>di</strong>zioni implicano la seguente formulazione <strong>per</strong> tensioni e<br />
deformazioni all’apice:<br />
(3.45)<br />
σ<br />
ε<br />
ij<br />
ij<br />
=<br />
=<br />
k<br />
k<br />
1<br />
2<br />
⎛<br />
⎜<br />
⎝<br />
⎛<br />
⎜<br />
⎝<br />
J<br />
r<br />
J<br />
r<br />
⎞<br />
⎟<br />
⎠<br />
⎞<br />
⎟<br />
⎠<br />
1<br />
n + 1<br />
n<br />
n + 1<br />
dove, k1 e k2 sono costanti <strong>di</strong> proporzionalità. Per materiali a comportamento lineare elastico (n=1),<br />
le equazioni (3.45) pre<strong>di</strong>cono la singolarità 1 r , le formulazioni risultano <strong>per</strong>tanto consistenti<br />
con la teoria LEFM (cfr. Paragrafo 3.2.2).<br />
La <strong>di</strong>stribuzione effettiva delle tensioni e delle deformazioni è ottenuta applicando<br />
opportune con<strong>di</strong>zioni al contorno. Le seguenti equazioni descrivono lo stato <strong>di</strong> sollecitazione e<br />
rappresentano il cosiddetto modello HRR:<br />
⎛ EJ ⎞<br />
⎜ 2<br />
ασ O I nr<br />
⎟<br />
⎝ ⎠<br />
1<br />
n+<br />
1<br />
(3.46) σ = σ ⎜ ⎟ σ ( n,<br />
θ )<br />
ij<br />
O<br />
(3.47) ε = ⎜ ⎟ ε ( n,<br />
θ )<br />
ij<br />
O<br />
ασ ⎛ EJ ⎞<br />
E ⎜ 2<br />
ασ O I nr<br />
⎟<br />
⎝ ⎠<br />
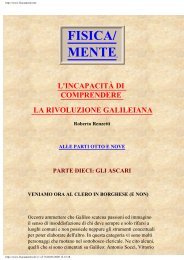
in cui, In è una coctante <strong>di</strong> integrazione che <strong>di</strong>pende da n (Figura 3.19); σ ij<br />
~ e ε ij<br />
~ sono funzioni<br />
<strong>di</strong>mensionali in n e θ (Figura 3.20).Questi parametri <strong>di</strong>pendono anche dallo stato <strong>di</strong> sollecitazione<br />
(es. plane stress o plane strain ). Le due equazioni precedenti descrivono la cosiddetta singolarità<br />
HRR. L’integrale J definisce l’ampiezza <strong>di</strong> questa singolarità caratterizzando completa<strong>mente</strong> le<br />
con<strong>di</strong>zioni all’interno <strong>della</strong> regione plastica, come il fattore <strong>di</strong> intensificazione delle tensioni <strong>per</strong> la<br />
~<br />
n<br />
n+<br />
1<br />
ij<br />
~<br />
ij<br />
83
LEFM. Un componente strutturale con una piccola zona snervata presenta due zone a <strong>di</strong>verse<br />
andamento: uno nella regione elastica dove le tensioni variano come 1 r e uno nella regione<br />
−1 ( n+<br />
1)<br />
plastica dove le tensioni variano come r .<br />
Figura 3.19 Effect of the strain hardening exponent on the HRR integration constant<br />
Figure 3.20 Angular variation of <strong>di</strong>mensionless stress for n=3 and n=13<br />
La singolarità HRR presenta la stessa apparente anomalia <strong>della</strong> singolarità LEFM: le<br />
tensioni tendono all’infinito <strong>per</strong> r tendente a zero. Le macroscopiche deformazioni all’apice <strong>della</strong><br />
fessura provocano l’arrotondamento del <strong>di</strong>fetto che riduce local<strong>mente</strong> lo stato <strong>di</strong> tensione triassiale.<br />
L’apice arrotondato <strong>della</strong> fessura è una su<strong>per</strong>ficie libera, <strong>per</strong> cui la componente x <strong>della</strong> tensione<br />
deve annullarsi. L’analisi che porta alla singolarità HRR si fonda sulla teoria delle piccole<br />
deformazioni e cade in <strong>di</strong>fetto <strong>per</strong> deformazioni più gran<strong>di</strong> del 10%. La componente normale alla<br />
su<strong>per</strong>ficie contenente la fessura raggiunge il suo picco quando xσ O J è approssimativa<strong>mente</strong> pari<br />
all’unità e <strong>di</strong>minuisce <strong>per</strong> x → 0 ; la singolarità HRR non è più valida all’interno <strong>di</strong> questa regione<br />
dove il campo <strong>di</strong> tensione è influenzato dalle deformazioni macroscopiche e dall’arrotondamento<br />
84
<strong>della</strong> fessura (Figura 3.21). In Figura 3.22 vengono schematica<strong>mente</strong> illustrati gli effetti <strong>della</strong><br />
plasticizzazione sulle tensioni in prossimità dell’apice.<br />
Figura 3.21 Blunting causes the stresses to deviate from the HRR solution<br />
Figura 3.22 Effect of plasticity on the crack tip stress fields<br />
85
3.4 Implementazione agli Elementi Finiti.<br />
3.4.1 Cenni sul co<strong>di</strong>ce strutturale MSC.Marc.<br />
Nel presente lavoro <strong>di</strong> Tesi la mo<strong>della</strong>zione agli elementi finiti dei problemi <strong>di</strong> meccanica<br />
<strong>della</strong> frattura è stata condotta con il co<strong>di</strong>ce strutturale MSC.Marc2001.<br />
Il co<strong>di</strong>ce MSC.Marc, sviluppato dalla MSC.Software Corporation (Santa Ana, California, USA), è<br />
un co<strong>di</strong>ce tri<strong>di</strong>mensionale che utilizza la tecnica degli elementi finiti <strong>per</strong> <strong>di</strong>scretizzare un dominio<br />
solido <strong>di</strong> forma qualsiasi. Il metodo degli elementi finiti (FEM = Finite Element Method) consente<br />
<strong>di</strong> determinare la soluzione numerica approssimata <strong>di</strong> un sistema <strong>di</strong> equazioni <strong>di</strong>fferenziali<br />
me<strong>di</strong>ante la risoluzione <strong>di</strong> un sistema <strong>di</strong> equazioni algebriche, solita<strong>mente</strong> lineari, equivalenti. Il<br />
metodo rappresenta un potente strumento <strong>di</strong> analisi strutturale che consente lo stu<strong>di</strong>o <strong>di</strong> strutture<br />
complesse comunque vincolate e caricate. Nel caso <strong>di</strong> un mezzo elastico, che occupa un<br />
determinato dominio, le incognite sono rappresentate dalle componenti <strong>di</strong> spostamento del generico<br />
punto del continuo, che devono sod<strong>di</strong>sfare opportune equazioni <strong>di</strong>fferenziali all'interno del dominio<br />
(equazioni <strong>di</strong> equilibrio indefinite, equazioni <strong>di</strong> congruenza, legame costitutivo) e sul contorno<br />
(con<strong>di</strong>zioni al contorno sugli spostamenti o sulle tensioni). Il dominio è sud<strong>di</strong>viso in un numero<br />
finito <strong>di</strong> sottodomini detti elementi finiti. Gli spostamenti incogniti sono calcolati in alcuni punti<br />
degli elementi (no<strong>di</strong>) e approssimati in tutti gli altri me<strong>di</strong>ante prefissate funzioni (<strong>di</strong> interpolazione<br />
o <strong>di</strong> forma).<br />
Il programma MSC.Marc consente <strong>di</strong> effettuare varie tipologie <strong>di</strong> analisi, dalle più semplici (<strong>di</strong> tipo<br />
statico in campo elastico-lineare) alle più complesse (transitori <strong>di</strong>namici non lineari, analisi <strong>di</strong><br />
scambio termico o anaòisi accoppiatte termo-meccaniche). La tipica procedura da seguire <strong>per</strong><br />
compiere un’analisi strutturale con il co<strong>di</strong>ce sono le seguenti:<br />
- costruzione del modello solido;<br />
- applicazione dei carichi, esecuzione del calcolo e ottenimento <strong>della</strong> soluzione;<br />
- analisi dei risultati.<br />
Il Sistema Marc contiene una serie <strong>di</strong> programmi integrati che facilitano l’analisi <strong>di</strong> problemi in<br />
campo ingegneristico. Il co<strong>di</strong>ce si compone dei due seguenti programmi:<br />
• Mentat<br />
• Marc<br />
Questi programmi lavorano insieme <strong>per</strong> generare le informazioni geometriche che definiscono la<br />
nostra struttura, eseguire l’analisi richiesta e rappresentare grafica<strong>mente</strong> i risultati ottenuti (Figura<br />
3.23).<br />
86
Figura 3.23 The Marc System<br />
3.4.2 Valutazione del J-Integral con il co<strong>di</strong>ce MSC.Marc.<br />
Il co<strong>di</strong>ce MSC.Marc consente la valutazione del J-Integral attraverso due <strong>di</strong>fferenti<br />
procedure. Il primo metodo valuta l’integrale J proposto da Rice usando il metodo <strong>di</strong> Parks. Il<br />
secondo metodo propone una versione estesa del J-Integral formulata da Kishimoto e DeLorenzi.<br />
MARC valuta l’integrale J calcolando la variazione <strong>di</strong> deformazione plastica dovuta allo<br />
spostamento nodale che accade nel corso dell’analisi numerica. Diversi valori <strong>di</strong> questo parametro<br />
possono essere ottenuti scegliendo opportuna<strong>mente</strong> <strong>di</strong>versi tracciati. Anche le deformazioni<br />
plastiche sono incluse nella valutazione <strong>della</strong> variazione <strong>di</strong> energia <strong>di</strong> deformazione in un analisi<br />
elasto-plastica, ciò <strong>per</strong>mette <strong>di</strong> calcolare il J-Integral <strong>per</strong> un materiale a comportamento non<br />
lineare. Un alto livello <strong>di</strong> accuratezza nei risultati può essere raggiunto con una modellizzazione ad<br />
elementi finiti piuttosto grossolane in quanto il modello implementato nel co<strong>di</strong>ce si fonda<br />
sull’energia <strong>di</strong> deformazione degli elementi e non sui valori locali <strong>di</strong> tensioni e spostamenti. In<br />
un’analisi elasto-plastica il J-Integral sarà valutato al <strong>di</strong> fuori <strong>della</strong> regione <strong>di</strong> plasticizzazione e<br />
coinciderà con il tasso <strong>di</strong> energia liberata nella propagazione <strong>della</strong> fessura.<br />
Il calcolo del J-Integral nel co<strong>di</strong>ce MARC si fonda sullo spostamento nodale e sulla<br />
<strong>di</strong>fferenziazione numerica <strong>per</strong> valutare la variazione <strong>di</strong> energia potenziale come funzione <strong>della</strong><br />
posizione dei singoli no<strong>di</strong>. Viene assunto che i carichi non cambiano durante lo spostamento<br />
nodale, quin<strong>di</strong> l’energia <strong>di</strong> deformazione risulta:<br />
E =<br />
(3.48) ∑ ∫∫<br />
elemets Vn<br />
+<br />
dE<br />
dl<br />
t<br />
0 1<br />
e<br />
ijεij<br />
σ &<br />
dvdt<br />
ij<br />
(3.49) = ∑ ∫∫ σ<br />
ij dv + ∑ ∫∫<br />
elements<br />
t<br />
V<br />
N<br />
dβ<br />
u<br />
dl<br />
N<br />
elements<br />
0 n+<br />
1<br />
0 Vn<br />
+ 1<br />
t<br />
σ<br />
e<br />
ijεij<br />
d<br />
dl<br />
dv<br />
dV<br />
dV<br />
87
Questa densità <strong>di</strong> energia è valutata tramite una <strong>di</strong>fferenziazione numerica a ciascun incremento <strong>per</strong><br />
ogni spostamento nodale con l’obiettivo <strong>di</strong> ricavare il tasso <strong>di</strong> rilascio <strong>di</strong> energia dopo ogni passo<br />
temporale come:<br />
(3.50)<br />
⎛ dE ⎞ ⎛ dE ⎞<br />
∆⎜<br />
⎟ = ⎜ ⎟<br />
⎝ dl<br />
⎠ ⎝ dl<br />
⎠<br />
t + ∆t<br />
⎛ dE ⎞<br />
− ⎜ ⎟<br />
⎝ dl<br />
⎠<br />
il valore così ottenuto viene <strong>di</strong>vise <strong>per</strong> la variazione dell’area <strong>di</strong> su<strong>per</strong>ficie <strong>della</strong> fessura, ottenendo<br />
in tal modo il valore del J-Integral.<br />
Figura 3.24 Closed Contour Used in the Evaluation of the J-Integral<br />
La formulazione classica del J-Integral proposta da Rice rappresenta un integrale<br />
curvilineo in<strong>di</strong>pendente dal <strong>per</strong>corso <strong>di</strong> integrazione ed è equivalente, come sopra menzionato, al<br />
tasso <strong>di</strong> energia rilasciata in materiali a comportamento lineare elastico. In due <strong>di</strong>mensioni è così<br />
definito (Figura 3.24):<br />
(3.51) J ⎜(<br />
W + T )<br />
⎛<br />
∂u<br />
j ⎞<br />
= ∫⎜<br />
n1<br />
−σ<br />
ijni<br />
⎟<br />
⎟dΓ<br />
⎝<br />
∂x1<br />
⎠<br />
Γ<br />
dove, W è la densità <strong>di</strong> energia <strong>di</strong> deformazione, T è la densità <strong>di</strong> energia cinetica, σ ij è il tensore<br />
delle tensioni e u 1 è il vettore spostamento.<br />
Una formulazione estesa del J-Integral è stata proposta da vari autori, in particolare<br />
Kishimoto e DeLorenzi, con lo scopo <strong>di</strong> includere nell’espressione classica alcuni effetti come la<br />
deformazione plastica, le forze <strong>di</strong> volume, i carichi termici, le forze inerziali, gli spostamenti e le<br />
deformazioni macroscopiche. La tipica espressione estesa dell’integrale J, implementata nel co<strong>di</strong>ce<br />
MARC, è la seguente (Figura 3.25):<br />
j<br />
j<br />
(3.52) J = ⎜Wn<br />
− t ⎟da<br />
− t da − ⎜(<br />
t − ρu& & )<br />
∫<br />
Γp<br />
⎛<br />
⎜<br />
⎝<br />
1<br />
i<br />
∂u<br />
∂x<br />
1<br />
⎞<br />
⎟<br />
⎠<br />
∫<br />
ΓS1i<br />
i<br />
∂u<br />
∂x<br />
1<br />
∫<br />
t<br />
Ωi<br />
⎛<br />
⎜<br />
⎝<br />
i<br />
i<br />
∂u<br />
∂x<br />
j<br />
1<br />
0<br />
∂ε<br />
⎞ ij<br />
−σ<br />
⎟<br />
ij dv<br />
∂x<br />
⎟<br />
1 ⎠<br />
88
Figura 3.25 Numerical Evaluation for J-Integral (Virtual crack advance)<br />
La valutazione <strong>di</strong> questo integrale J in MSC.Marc [29] è basata sul metodo del dominio <strong>di</strong><br />
integrazione. Una valutazione <strong>di</strong>retta dell’equazione (3.52) non è affatto semplice in un’analisi agli<br />
elementi finiti <strong>per</strong> le <strong>di</strong>fficoltà nel definire il tracciato Γ <strong>di</strong> integrazione. Nel metodo del dominio <strong>di</strong><br />
integrazione, caso bi<strong>di</strong>mensionale, l’integrale <strong>di</strong> linea è convertito in un integrale su<strong>per</strong>ficiale<br />
sull’area racchiusa dal tracciato. In due <strong>di</strong>mensioni, la formulazione del J-Integral assumerà la<br />
seguente forma:<br />
∫<br />
J = −<br />
Ω<br />
1 ∂δx<br />
⎛ ∂u<br />
1<br />
j ⎞<br />
(3.53) J = − ∫ ⎜<br />
⎜Wδ1<br />
j − σ ij ⎟<br />
⎟dv<br />
∆a<br />
∂x<br />
Ω j ⎝ ∂x1<br />
⎠<br />
(3.54) Formulazione estesa<br />
1 ∂δx<br />
∆a<br />
∂x<br />
⎛<br />
Formulazione classica<br />
0<br />
⎛ ∂u<br />
j ⎞ ∂x<br />
∂u<br />
∂ ∂<br />
⎜<br />
j ∂ε<br />
u<br />
1<br />
∫ ( − ) − ⎟<br />
⎜<br />
⎟<br />
1<br />
ij x1<br />
j<br />
Wδ1<br />
j −σ<br />
ij dv − fi<br />
ρu&<br />
& i σ ij dv −<br />
∆ ⎜<br />
⎟ ∫ ti<br />
j ⎝ ∂x1<br />
⎠ a<br />
∆ ∂<br />
Ω ⎝<br />
∂x1<br />
∂x1<br />
⎠<br />
a x<br />
Γ<br />
1<br />
S<br />
In tre <strong>di</strong>mensioni l’integrale <strong>di</strong> linea <strong>di</strong>venta un integrale <strong>di</strong> su<strong>per</strong>ficie mentre quello <strong>di</strong> area<br />
<strong>di</strong>venta un integrale <strong>di</strong> volume valutato su tutti gli elementi finiti racchiusi all’interno del dominio.<br />
Il co<strong>di</strong>ce MARC richiede la definizione delle regioni rigide <strong>per</strong> eseguire il calcolo del J-Integral.<br />
Tali regioni sono definiti dai set <strong>di</strong> no<strong>di</strong> che contengono una parte del fronte <strong>della</strong> fessura e il<br />
contributo all’integrale sarà dato da tutti quegli elementi che hanno almeno un nodo in queste<br />
regioni.<br />
⎞<br />
da<br />
89
3.4.3 Caratteristiche <strong>della</strong> Mesh da impiegare in FEM.<br />
La principale <strong>di</strong>fficoltà nell’analisi agli elementi finiti <strong>di</strong> problemi <strong>di</strong> meccanica <strong>della</strong><br />
frattura è la capacità <strong>di</strong> ottenere una soluzione atten<strong>di</strong>bile in prossimità dell’apice <strong>di</strong> una fessura. La<br />
mesh in questa zona deve essere opportuna<strong>mente</strong> mo<strong>della</strong>ta in maniera tale da approssimare con<br />
sufficiente accuratezza le singolarità ivi presenti sulle tensioni e le deformazioni. Le singolarità<br />
all’apice devono essere ricavare a seguito <strong>di</strong> un’analisi “small-strain”. Sono stati concepiti molti<br />
meto<strong>di</strong> <strong>per</strong> ottenere una buona approssimazione ma comunque il metodo più <strong>di</strong>ffusa<strong>mente</strong> usato<br />
nelle mo<strong>della</strong>zioni agli elementi finiti è il cosiddetto “1/4 point node technique” [31]. Se r è la<br />
<strong>di</strong>stanza dall’apice <strong>di</strong> un <strong>di</strong>fetto, le singolarità sulle deformazioni ottenute da un’analisi alle piccole<br />
deformazioni sono:<br />
-<br />
-<br />
−1<br />
2<br />
ε ∝ r <strong>per</strong> materiale a comportamento lineare elastico;<br />
−1<br />
ε ∝ r <strong>per</strong> materiale a comportamento elastico <strong>per</strong>fetta<strong>mente</strong> plastico;<br />
−<br />
∝ + 1 n<br />
n<br />
- ε r <strong>per</strong> materiale incrudente con opportuna legge <strong>di</strong> potenza.<br />
In due <strong>di</strong>mensioni le singolarità possono essere costruite agli elementi finiti usando<br />
elementi isoparametrici quadrilateri collassati all’apice a formare una specie <strong>di</strong> anello intorno alla<br />
fessura. Uno spigolo dell’elemento isoparametrico ad 8 no<strong>di</strong> sarà collassato in maniera che tutti i<br />
suoi tre no<strong>di</strong> –a,d,c- abbiano la stessa posizione geometrica all’apice mentre in no<strong>di</strong> in mezzeria<br />
sugli spigoli connessi all’apice devono essere mossi ad 1/4 verso lo spigolo (Figura 3.26).<br />
Questa procedura consente <strong>di</strong> ottenere una singolarità sulle deformazioni così espressa:<br />
(3.55)<br />
La singolarità<br />
termini<br />
−1<br />
r e<br />
n<br />
−<br />
n+<br />
1<br />
A B<br />
ε → + <strong>per</strong> r → 0<br />
1 2<br />
r r<br />
r non può essere ricreata esatta<strong>mente</strong> ma un’opportuna combinazione dei due<br />
−1<br />
2<br />
r può portare ad una sua buona approssimazione.<br />
La prima singolarità r si ottiene imponendo che i tre no<strong>di</strong> sopra citati abbiano gli stessi<br />
spostamenti ed adottando la tecnica del “quarter point” (A=0) (Figura 3.27 (a)).<br />
La seconda singolarità 1 r si ottiene lasciando i no<strong>di</strong> nella posizione <strong>di</strong> mezzeria e<br />
consentendo un movimento in<strong>di</strong>pendente dei tre no<strong>di</strong> collassati all’apice (B=0) (Figura 3.27 (b)).<br />
La terza singolarità, come già definito in precedenza, può essere ottenuta con buona<br />
approssimazione utilizzando la tecnica del “quarter point” e <strong>per</strong>mettendo ai no<strong>di</strong> all’apice un<br />
movimento in<strong>di</strong>pendente. In combinazione a questa tipologia <strong>di</strong> schematizzazione agli elementi<br />
finiti deve essere impiegata un’opportuna legge <strong>di</strong> potenza <strong>per</strong> descrivere il comportamento<br />
incrudente del materiale (in genere si utilizza la relazione <strong>di</strong> Ramberg-Osgood).<br />
90
Figura 3.26 Collapsed two-<strong>di</strong>mensional element<br />
Figura 3.27 Crack tip elements for elastic and elastic-plastic analysis<br />
In tre <strong>di</strong>mensioni vengono general<strong>mente</strong> utilizzati elementi isoparametrici tetraedrici a 20 no<strong>di</strong> con<br />
una faccia collassata sul fronte <strong>della</strong> fessura (Figura 3.28). Le procedure <strong>per</strong> ottenere le singolarità<br />
in prossimità del <strong>di</strong>fetto sono del tutto simili a quelle già viste <strong>per</strong> il caso bi<strong>di</strong>mensionale. La mesh<br />
lungo il fronte <strong>della</strong> fessura è tipica<strong>mente</strong> creato a partire da una mesh piana con una tipica forma a<br />
ragnatela concentrata sull’apppice del <strong>di</strong>fetto che viene estrusa lungo il fronte stesso. Questa<br />
procedura <strong>di</strong> modellizzazione agli elementi finiti consente <strong>di</strong> creare una regione rigida regolare che<br />
garantisce una buona accuratezza dei risultati ottenuti.<br />
Figura 3.28 Collapsed three-<strong>di</strong>mensional element<br />
Le <strong>di</strong>mensioni degli elementi focalizzati all’apice <strong>di</strong> una cricca influenzano l’accuratezza<br />
delle soluzioni che si possono ottenere. In linea <strong>di</strong> principio una più piccola <strong>di</strong>mensione ra<strong>di</strong>ale<br />
degli elementi porterà ad avere sempre più buoni risultati. Un’analisi <strong>di</strong> sensitività <strong>della</strong> mesh,<br />
infittendo opportuna<strong>mente</strong> il modello agli elementi finiti in prossimità del <strong>di</strong>fetto, dovrà essere<br />
91
quin<strong>di</strong> condotta <strong>per</strong> capire quanto le soluzioni siano <strong>di</strong>pendenti dalla mesh impiegata. Un più alto<br />
or<strong>di</strong>ne <strong>di</strong> elementi porta inevitabil<strong>mente</strong> a più lunghi tempi <strong>di</strong> calcolo, è <strong>per</strong>tanto necessario<br />
effettuare una scelta <strong>di</strong> compromesso. L’in<strong>di</strong>pendenza dal tracciato svelto nella valutazione del Jintegral<br />
da parte del co<strong>di</strong>ce <strong>di</strong> calcolo è sicura<strong>mente</strong> un idoneo in<strong>di</strong>ce <strong>per</strong> valutare se la mesh<br />
impiegata è opportuna<strong>mente</strong> raffinata nella zona considerata. Comunque buoni risultati sul Jintegral<br />
si possono ottenere anche con mesh a maglie relativa<strong>mente</strong> larghe ma <strong>per</strong> ottenere una<br />
buona valutazione delle deformazioni e delle tensioni all’apice, gli elementi finiti devono essere<br />
opportuna<strong>mente</strong> raffinati. Va in ogni caso sottolineato il fatto che la non <strong>per</strong> fetta in<strong>di</strong>pendenza dei<br />
valori stimati del J-Integral dal tracciato considerato è da imputare alla natura approssimata <strong>di</strong> una<br />
soluzione agli elementi finiti.<br />
3.5 Verifiche previste dalla norma ASME XI.<br />
I meto<strong>di</strong> <strong>di</strong> verifica stabiliti nell’Appen<strong>di</strong>ce A delle ASME XI sono simili a quelle delle<br />
ASME III presi a riferimento in fase <strong>di</strong> progetto. Sono utilizzati i meto<strong>di</strong> <strong>della</strong> meccanica <strong>della</strong><br />
frattura lineare elastica <strong>per</strong> la verifica alla frattura fragile <strong>per</strong>ò nelle ASME XI si fa riferimento a<br />
<strong>di</strong>fetti reali rilevati nelle ispezioni in esercizio (Inservice Inspection) [32].<br />
La normativa consente <strong>di</strong> calcolare i fattori <strong>di</strong> intensificazione degli sforzi, KI ,<br />
corrispondenti alle tensioni membranali e flessionali determinate me<strong>di</strong>ante l’analisi delle<br />
sollecitazioni sul componente considerato. Le tensioni, in corrispondenza delle fessure, devono<br />
essere sud<strong>di</strong>vise in tensioni membranali e flessionali, effettuando una linearizzazione come in<strong>di</strong>cato<br />
in Figura 3.29. Nell’analisi delle sollecitazioni devono essere tenute in considerazione anche le<br />
tensioni residue e le tensioni dovute a tutti i carichi applicati (pressione, tensioni termiche, tensioni<br />
dovute alle <strong>di</strong>scontinuità, tensioni indotte dalla placcatura,…).<br />
Figura 3.29 Linearization of stresses<br />
92
Il fattore <strong>di</strong> intensificazione degli sforzi è calcolato tramite la seguente formula,<br />
espressione del tutto simile alla (3.14) <strong>per</strong> lo stato <strong>di</strong> tensione all’apice nella LEFM:<br />
dove,<br />
(3.56)<br />
πa<br />
KI = σ mM<br />
m + σ bM<br />
b<br />
Q<br />
πa<br />
Q<br />
σ m e σ b sono rispettiva<strong>mente</strong> le tensioni membranali e flessionali;<br />
a il semiasse più piccolo <strong>di</strong> un <strong>di</strong>fetto sub-su<strong>per</strong>ficiale o la profon<strong>di</strong>tà <strong>di</strong> uno su<strong>per</strong>ficiale;<br />
Q un fattore <strong>di</strong> forma del <strong>di</strong>fetto (Figura 3.30);<br />
M m il fattore <strong>di</strong> correzione delle tensioni membranali (Figura 3.31 e 3.32)<br />
M b il fattore <strong>di</strong> correzione delle tensioni flessionali (Figura 3.33 e 3.34)<br />
Figura 3.30 Determination of crack shape factor Q<br />
Figura 3.31 Corrective factor for membrane stress for internal cracks<br />
93
Figura 3.32 Corrective factor for membrane stress for edge cracks<br />
Figura 3.33 Corrective factor for ben<strong>di</strong>ng stress for internal cracks<br />
Figura 3.34 Corrective factor for ben<strong>di</strong>ng stress for edge cracks<br />
94