Statica di un sistema di corpi rigidi - Università degli studi di Bergamo
Statica di un sistema di corpi rigidi - Università degli studi di Bergamo
Statica di un sistema di corpi rigidi - Università degli studi di Bergamo

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
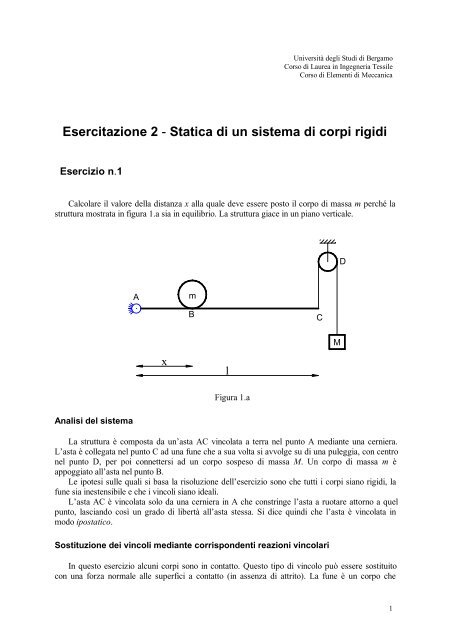
Università <strong>degli</strong> Stu<strong>di</strong> <strong>di</strong> <strong>Bergamo</strong>Corso <strong>di</strong> Laurea in Ingegneria TessileCorso <strong>di</strong> Elementi <strong>di</strong> MeccanicaEsercitazione 2 - <strong>Statica</strong> <strong>di</strong> <strong>un</strong> <strong>sistema</strong> <strong>di</strong> <strong>corpi</strong> rigi<strong>di</strong>Esercizio n.1Calcolare il valore della <strong>di</strong>stanza x alla quale deve essere posto il corpo <strong>di</strong> massa m perché lastruttura mostrata in figura 1.a sia in equilibrio. La struttura giace in <strong>un</strong> piano verticale.DAmBCMxlFigura 1.aAnalisi del <strong>sistema</strong>La struttura è composta da <strong>un</strong>’asta AC vincolata a terra nel p<strong>un</strong>to A me<strong>di</strong>ante <strong>un</strong>a cerniera.L’asta è collegata nel p<strong>un</strong>to C ad <strong>un</strong>a f<strong>un</strong>e che a sua volta si avvolge su <strong>di</strong> <strong>un</strong>a puleggia, con centronel p<strong>un</strong>to D, per poi connettersi ad <strong>un</strong> corpo sospeso <strong>di</strong> massa M. Un corpo <strong>di</strong> massa m èappoggiato all’asta nel p<strong>un</strong>to B.Le ipotesi sulle quali si basa la risoluzione dell’esercizio sono che tutti i <strong>corpi</strong> siano rigi<strong>di</strong>, laf<strong>un</strong>e sia inestensibile e che i vincoli siano ideali.L’asta AC è vincolata solo da <strong>un</strong>a cerniera in A che constringe l’asta a ruotare attorno a quelp<strong>un</strong>to, lasciando così <strong>un</strong> grado <strong>di</strong> libertà all’asta stessa. Si <strong>di</strong>ce quin<strong>di</strong> che l’asta è vincolata inmodo ipostatico.Sostituzione dei vincoli me<strong>di</strong>ante corrispondenti reazioni vincolariIn questo esercizio alc<strong>un</strong>i <strong>corpi</strong> sono in contatto. Questo tipo <strong>di</strong> vincolo può essere sostituitocon <strong>un</strong>a forza normale alle superfici a contatto (in assenza <strong>di</strong> attrito). La f<strong>un</strong>e è <strong>un</strong> corpo che1
oppone resistenza solo ad azioni <strong>di</strong> trazione, per cui la reazione vincolare corrispondente sarà<strong>di</strong>retta come la f<strong>un</strong>e stessa (T). Il <strong>sistema</strong> <strong>di</strong> <strong>corpi</strong> giace in <strong>un</strong> piano verticale, quin<strong>di</strong> i <strong>corpi</strong> dotati<strong>di</strong> massa sono soggetti alla forza <strong>di</strong> gravità. In figura 1.b sono evidenziate le reazioni vincolari.mgVDDmBTTVBVBTTAHABCMVAMgFigura 1.bCalcolo delle reazioni vincolariAvendo in<strong>di</strong>viduato fondamentalmente quattro <strong>corpi</strong> (asta AC, corpo <strong>di</strong> massa m, puleggia,corpo <strong>di</strong> massa M), abbiamo a <strong>di</strong>sposizione do<strong>di</strong>ci equazioni car<strong>di</strong>nali della statica, tre per ognicorpo. Le incognite evidenziate in figura 1.b sono però meno, in quanto sulle due masse e sullapuleggia sono presenti solo forze <strong>di</strong>rette verticalmente.Per il corpo <strong>di</strong> massa m possiamo scrivereV B mg 0Per la puleggiaV D 2T 0Per il corpo <strong>di</strong> massa MT Mg 0Per l’asta AC2
H A 0V A V B T 0xV B lT 0Le equazioni possono essere raccolte in <strong>un</strong> <strong>un</strong>ico <strong>sistema</strong>V B mg 0V D 2T 0T Mg 0H A 0V A V B T 0xV B lT 0Il <strong>sistema</strong> è costituito da sei equazioni in sei incognite (H A , V A , V B , T, V D , x) che può essererisolto facilmente. Il risultato ottenuto èH A 0V A m MgV B mgT MgV D 2Mgx M m lSi conclude che l’<strong>un</strong>ica posizione per la quale il <strong>sistema</strong> <strong>di</strong> figura 1.a sia in equilibrio è che ilcorpo <strong>di</strong> massa m sia posto a <strong>di</strong>stanza pari a M m l dalla cerniera in A. 3
Esercizio n.2Calcolare le forze esercitate dai due <strong>corpi</strong> <strong>di</strong> masse m e M (e <strong>di</strong>ametri d 1 e d 2 ) sulle pareti(liscie) del contenitore mostrato in figura 2.a. Il <strong>sistema</strong> <strong>di</strong> <strong>corpi</strong> giace in <strong>un</strong> piano verticale.CmDAMBlFigura 2.aAnalisi del <strong>sistema</strong>Il <strong>sistema</strong> è formato da due <strong>corpi</strong> soggetti alla forza <strong>di</strong> gravità, a contatto con le pareti liscie <strong>di</strong><strong>un</strong> contenitore. Nei p<strong>un</strong>ti <strong>di</strong> contatto, le forze che gli elementi si scambiano sono <strong>di</strong>rettenormalmente alle superfici <strong>di</strong> contatto stesse.Sostituzione dei vincoli me<strong>di</strong>ante corrispondenti reazioni vincolariIn figura 2.b sono evidenziate le reazioni vincolari.Calcolo delle reazioni vincolariPossiamo scrivere <strong>un</strong> <strong>sistema</strong> <strong>di</strong> equazioni <strong>di</strong> equilibrio per ciasc<strong>un</strong> corpo appartenente al<strong>sistema</strong>. Per il corpo <strong>di</strong> massa m F H 0 F V 0R C cos H D 0R C sin mg 0dove l’angolo , definito come angolo tra la congi<strong>un</strong>gente ai due centri delle circonferenze el’orizzontale, è stato calcolato come arccos l d 12 d 22d 1 d 22 2 arccos2ld 1 d 2 14
mgDCmHDRCRCAMgCHAMBVBFigura 2.bPer il corpo <strong>di</strong> massa M F H 0 F V 0H A R C cos 0V B R C sin Mg 0Le equazioni possono essere raccolte in <strong>un</strong> <strong>un</strong>ico <strong>sistema</strong> che è costituito da quattro equazioniin quattro incognite (H A , V B , H D e R C ) che può essere risolto facilmente. Il risultato ottenuto èR C cos H D 0R C sin mg 0H A R C cos 0V B R C sin Mg 0H A mgtanV B M mgH D mgtanR C mgsinSoluzione del problema per via graficaLa soluzione al problema può essere affrontata anche per via grafica. Si può osservare infattiche il corpo <strong>di</strong> massa m è soggetto a tre forze concorrenti in <strong>un</strong> p<strong>un</strong>to, che è il centro dellacirconferenza che delinea il profilo del corpo. E’ possibile quin<strong>di</strong> costruire il triangolo delle forze(come mostrato nel <strong>di</strong>segno a sinistra <strong>di</strong> figura 2.c) e ricavare il valore dei moduli <strong>di</strong> R C e H D comeR C mgsinH D mgtan5
αβRCmgRCRRVBαHDMgHAFigura 2.cCalcolati i vettori R C e H D si può procedere al calcolo delle altre reazioni vincolari. Le rette <strong>di</strong>azione della forza R C e della forza peso Mg passano entrambe per il centro della circonferenza equin<strong>di</strong> anche la loro risultante R che può essere trovata graficamente, come mostra il <strong>di</strong>segnocentrale <strong>di</strong> figura 2.c. Per ottenere analiticamente il modulo e la <strong>di</strong>rezione del vettore R(in<strong>di</strong>viduabile me<strong>di</strong>ante l’angolo )R Mg R C sin 2 R C cos 2 arctan Mg R C sinR Ccos Anche sul corpo <strong>di</strong> massa M sono applicate tre forze (H A , V B e R) le cui rette <strong>di</strong> applicazione siincontrano nel centro della circonferenza che descrive la geometria del corpo. Si procede quin<strong>di</strong> altracciamento del triangolo delle forze, come mostrato nel <strong>di</strong>segno a destra <strong>di</strong> figura 2.c. I valori deimoduli delle reazioni vincolari H A e V B si trovano me<strong>di</strong>anteH A R cos V B R sin6
Esercizio n.3Calcolare le reazioni vincolari della struttura mostrata in figura 3.a.AhαB CD EP/2P= =lFigura 3.aAnalisi del <strong>sistema</strong>La struttura è composta da due aste AD e BE vincolate a terra da due cerniere nei p<strong>un</strong>ti A e Be collegate da <strong>un</strong>a cerniera relativa nel p<strong>un</strong>to D. La struttura è caricata da due forze applicate neip<strong>un</strong>ti C ed E. Valgono le solite ipotesi secondo le quali le aste sono considerate rigide e i vincoliideali. La figura 3.b mostra la schematizzazione dei vincoli.AB C D EP/2 PAnalisi cinematica del corpoFigura 3.bLe cerniere nei p<strong>un</strong>ti A e B consentono alle travi <strong>di</strong> ruotare attorno a questi ultimi. La presenza<strong>di</strong> <strong>un</strong>a cerniera relativa posta in D elimina ogni grado <strong>di</strong> libertà rimasto alla struttura. D’altro cantoil conteggio dei gra<strong>di</strong> <strong>di</strong> libertà - gra<strong>di</strong> <strong>di</strong> vincolo <strong>di</strong>ce che a 6 gra<strong>di</strong> <strong>di</strong> libertà delle due aste liberecorrispondono sei gra<strong>di</strong> <strong>di</strong> vincolo dovuti alle tre cerniere. Una struttura <strong>di</strong> questo tipo vienecom<strong>un</strong>emente chiamata arco a tre cerniere. La struttura è d<strong>un</strong>que isostatica.7
Sostituzione dei vincoli me<strong>di</strong>ante corrispondenti reazioni vincolariIn figura 3.c sono evidenziate le reazioni vincolari.HAAVAHDDVDVDHBBCP/2DHDEPVBCalcolo delle reazioni vincolariLe reazioni vincolari incognite sono sei e sei sono le equazioni car<strong>di</strong>nali della statica chepossiamo scrivere per le due aste AD e BE. Raccogliendole tutte in <strong>un</strong> <strong>un</strong>ico <strong>sistema</strong> <strong>di</strong> equazioniotteniamo F H AD 0 F V AD 0 M D AD 0 F H BE 0 F V BE 0 M A BE 0H A H D 0V A V D 0H D h htan V D 0H B H D 0V B P 2 V D P 0P2h2 tan V hDtan Pl 0il quale ammette come soluzione8
H A P 14 tan l hV A Ph l tan 1 4H B Ph l 14 tanV B P 3 4 h l tanH D Ph l 14 tanV D P 1 4 h l tanE’ possibile semplificare il <strong>sistema</strong> <strong>di</strong> equazioni facendo <strong>un</strong>a considerazione iniziale. Scrivendo<strong>un</strong>’equazione <strong>di</strong> equilibrio dei momenti rispetto al p<strong>un</strong>to D della sola asta AD si ottieneH A h htan V A 0V AH A tanovvero la reazione vincolare è <strong>di</strong>retta come mostrato in figura 3.dRAABCDEHBP/2PVBFigura 3.dGrazie a questa considerazione le incognite del <strong>sistema</strong> sono i moduli delle reazioni vincolariH B , V B e R A e tre equazioni car<strong>di</strong>nali della statica sono sufficienti per la soluzione del <strong>sistema</strong><strong>di</strong> equazioni F H 0 F V 0 M A 0R A cos H B 0R A sin V B P 2 P 0R A hcos P 2h2tan Pl 0il quale ammette come soluzione9
H B Ph l 14 tanV B P 3 4 h l tanR A Plhcos 14 sin10
Esercizio n.4Calcolare le reazioni vincolari per la struttura rappresentata in figura 4.a.CLADBP= =lFigura 4.aAnalisi del <strong>sistema</strong>La struttura è composta da due aste AB e BC vincolate a terra da due cerniere nei p<strong>un</strong>ti A e Be collegate da <strong>un</strong> pattino relativo nel p<strong>un</strong>to D. La struttura è caricata da <strong>un</strong>a forza applicata nelp<strong>un</strong>to D. Valgono le solite ipotesi secondo le quali le aste sono considerate rigide e i vincoli ideali.Le cerniere nei p<strong>un</strong>ti A e B consentono alle travi <strong>di</strong> ruotare attorno a questi ultimi. La presenza<strong>di</strong> <strong>un</strong> pattino relativo in D elimina ogni grado <strong>di</strong> libertà rimasto alla struttura. D’altro canto ilconteggio dei gra<strong>di</strong> <strong>di</strong> libertà - gra<strong>di</strong> <strong>di</strong> vincolo mostra che a 6 gra<strong>di</strong> <strong>di</strong> libertà delle due aste liberecorrispondono sei gra<strong>di</strong> <strong>di</strong> vincolo dovuti alle due cerniere e al pattino. La struttura è d<strong>un</strong>queisostatica.Sostituzione dei vincoli me<strong>di</strong>ante corrispondenti reazioni vincolariIn figura 4.b sono evidenziate le reazioni vincolari.Calcolo delle reazioni vincolariLe reazioni vincolari incognite sono sei e sei sono le equazioni car<strong>di</strong>nali della statica chepossiamo scrivere per le due aste AD e BE. Raccogliendole tutte in <strong>un</strong> <strong>un</strong>ico <strong>sistema</strong> <strong>di</strong> equazioniotteniamo11
VCHCCMBMBADBBHAPHBHBVAFigura 4.b F H AB 0 F V AB 0 M A AB 0 F H BC 0 F V BC 0 M B BC 0H A H B 0V A P 0M B P2 l 0H C H B 0V C 0H C L M B 0il quale ammette come soluzioneH A P l2LV A PH B P l2LM B P l 2H C P l2LV C 0Non è strettamente necessario calcolare le reazioni interne alla struttura per il calcolo dellereazioni vincolari a terra. Scrivendo <strong>un</strong>’equazione <strong>di</strong> equilibrio delle forze in <strong>di</strong>rezione verticaledella sola asta AB è possibile trovare subito il valore della componente verticale della reazionevincolare V AV A P 0 V A PA questo p<strong>un</strong>to le incognite rimaste sono tre e le equazioni car<strong>di</strong>nali della statica per l’intero<strong>sistema</strong> sono sufficienti a risolvere il problema12
F H 0 F V 0 M A 0H A H C 0V A P V C 0P l 2 H CL V C l 0il quale ammette come soluzioneH A P l2LH C P l2LV C 0VCHCCADBHAPVAFigura 4.c13