Studiju kursa programma un norÄdÄ«jumi - Par RTU
Studiju kursa programma un norÄdÄ«jumi - Par RTU
Studiju kursa programma un norÄdÄ«jumi - Par RTU
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
R ĪGAS TEHNISKĀ UNIVERSITĀTE<br />
M ateriālu<br />
apstrādes<br />
tehnoloģijas<br />
katedra<br />
Ē<br />
v<br />
a<br />
l<br />
d<br />
s<br />
P<br />
r<br />
ī<br />
ma<br />
n<br />
i<br />
s<br />
M<br />
AŠĪNBŪVES<br />
p iedziņa<br />
<strong>un</strong><br />
IEKĀRT<br />
vadība<br />
Pr<br />
ogramma <strong>un</strong> metodiskie norādījumi<br />
U<br />
R īgas<br />
Tehniskā Universitāte<br />
Rīga<br />
- 2013
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
2<br />
<strong>un</strong> vadība<br />
piedziņa<br />
iekārtu<br />
ašīnbūves<br />
M<br />
3 KP<br />
ve<br />
iedziņas<br />
P<br />
<strong>un</strong> to<br />
Ātrumkārbas<br />
f<strong>un</strong>kcijas.<br />
galvenās<br />
Piedziņas<br />
elementi.<br />
tās<br />
<strong>un</strong><br />
idi<br />
aprakstošie<br />
analīze,<br />
iekārtu piedziņas<br />
Mašīnbūves<br />
struktūra.<br />
Piedziņas<br />
mehānismi.<br />
sintēze.<br />
struktūras<br />
Piedziņas<br />
veidsaiknes.<br />
Spēka<br />
saikņu aprēķins.<br />
vienādojumi,<br />
elementu konstru<br />
iedziņas<br />
P<br />
klasifikācija<br />
sistēmu<br />
iekārtu vadības<br />
Mašīnbūves<br />
kcijas.<br />
ciparvadība.<br />
komandvadība,<br />
Spēkvadība,<br />
struktūra.<br />
daļas<br />
Vadošās<br />
raksturojumi.<br />
<strong>un</strong><br />
sintēze.<br />
struktūras<br />
adības<br />
V<br />
Machinery<br />
Engineering<br />
of<br />
Control<br />
and<br />
rive<br />
D<br />
P<br />
C<br />
3<br />
f<strong>un</strong>ction<br />
Main<br />
drive.<br />
of<br />
elements<br />
and<br />
ypes<br />
T<br />
and their<br />
boxes<br />
Gear<br />
drive.<br />
of<br />
s<br />
drive,<br />
equipment<br />
engineering<br />
the<br />
of<br />
Analysis<br />
drive.<br />
of<br />
Structure<br />
mechanisms.<br />
Synthesis<br />
power.<br />
of<br />
links<br />
Model<br />
links.<br />
calculation of<br />
describing drive<br />
for<br />
equations<br />
Classi<br />
elements.<br />
drive<br />
of<br />
Constructions<br />
structure.<br />
driving<br />
f<br />
o<br />
fication and<br />
control<br />
of<br />
Structure<br />
systems.<br />
control<br />
equipment<br />
engineering<br />
the<br />
of<br />
characteristics<br />
control<br />
of<br />
Synthesis<br />
control.<br />
computer<br />
control,<br />
command<br />
control,<br />
Power<br />
part.<br />
tructure.<br />
s
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
S aturs<br />
<strong>Studiju</strong> <strong>kursa</strong> mērķis <strong>un</strong> uzdevumi<br />
..........................................................................................<br />
4<br />
P rogramma. ...............................................................................................................................<br />
5<br />
M ašīnbūves iekārtu analīzes metodika. ....................................................................................<br />
7<br />
N orādījumi praktisko darbu veikšanai ..................................................................................<br />
17<br />
S tudiju darba izpildes kārtība ............................................................................................<br />
19<br />
A prēķinu tabula ..................................................................................................................<br />
24<br />
N orādījumi laboratorijas darbu veikšanai. ............................................................................<br />
25<br />
S tudiju darba uzdevumi. .........................................................................................................<br />
26<br />
Kontroljautāju mi<br />
....................................................................................................................<br />
27<br />
P ielikums ................................................................................................................................. 29<br />
L iteratūras saraksts ................................................................................................................<br />
30<br />
3
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
S tudiju<br />
<strong>kursa</strong><br />
m ērķis <strong>un</strong> uzdevumi<br />
MAŠĪNBŪVES<br />
IEKĀ<strong>RTU</strong> st udiju<br />
k ursu<br />
g rupā ietilpst studiju kurss „Mašīnbūves<br />
iekārtas, ierīces <strong>un</strong> instrumenti” <strong>un</strong> studiju kurss „Mašīnbūves iekārtu piedziņa <strong>un</strong><br />
v adība„. Šie studiju kursi i r svarīga ar mašīnbūvi <strong>un</strong> ražošanas tehnoloģiju saistīto<br />
s tudiju programmu sadaļa.<br />
St<br />
udējošiem ir iespēja iepazīties ar metālapstrādes <strong>un</strong><br />
citu iekārtu uzbūves principiem, lietošanas iespējām <strong>un</strong> ja<strong>un</strong>u iekārtu izveidošanas<br />
iespējām.<br />
S tudiju<br />
k ursu<br />
a pgūšana ir saistīta ar šādām īpatnībām:<br />
a) da žādu ražošanas iekārtu<br />
v eidu skaits ir ļoti liels;<br />
b) n epieciešamība<br />
veikt iekārtu kā sistēmu analīzi <strong>un</strong> sintēzi;<br />
c) studiju kursu apgūšanas pamatvirzība<br />
- n o vispārīgā uz atsevišķo<br />
( dažos<br />
s tudiju<br />
procesa<br />
etapos<br />
arī<br />
p retēji).<br />
Pl<br />
aša profila inženierim,<br />
piedaloties visekonomiskākā ražošanas<br />
n oteikšanā <strong>un</strong> pamato<br />
šanā,<br />
vispirms jāiepazīstas ar jebkuras ražošanas<br />
g alvenajiem parametriem <strong>un</strong> tās tehnoloģiskajām iespējām.<br />
varianta<br />
iekārtas<br />
S tudiju<br />
<strong>kursa</strong> mērķis<br />
i r<br />
mašīnbūves<br />
iekārtu<br />
izmantošanas<br />
apgūšana<br />
dažādu<br />
r ažošanas<br />
veidu tehnoloģiskajos procesos.<br />
S tudiju<br />
<strong>kursa</strong> uzdevumi<br />
i r<br />
a) iepazīs<br />
tināt<br />
studējošos<br />
ar<br />
dažāda<br />
veida<br />
tehnoloģisko<br />
iekārtu<br />
piedziņas<br />
v ariantiem<br />
<strong>un</strong><br />
v adības iespējām;<br />
b) ļ aut tiem<br />
apgūt<br />
m ašīnbūves<br />
iekārtu<br />
analīzes<br />
metodikas<br />
izmantošanu<br />
m odernizācijas procesā;<br />
c) nodrošināt<br />
iepazīš<br />
anos<br />
r ealizācija paņēmieniem.<br />
a r<br />
dažādu<br />
m ašīnbūves<br />
iekārtu<br />
piedziņas<br />
u n<br />
vadības<br />
<strong>Studiju</strong> kurss ir cieši saistīts ar citiem mašīnbūves <strong>un</strong> ražošanas tehnoloģijas studiju<br />
k ursiem. Tas noder studējot arī inženiermehāniku <strong>un</strong> transporta sistēmu inženieriju.<br />
4
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
5<br />
rogramma<br />
P<br />
ašīnbūve<br />
M<br />
a<br />
piedziņ<br />
iekārtu<br />
s<br />
iedziņas<br />
P<br />
to<br />
<strong>un</strong><br />
Ātrumkārbas<br />
f<strong>un</strong>kcijas.<br />
galvenās<br />
Piedziņas<br />
elementi.<br />
tās<br />
<strong>un</strong><br />
veidi<br />
ietaises.<br />
Ātrumkārbu vadības<br />
ehānismi.<br />
m<br />
vadības<br />
parametru<br />
Hidropiedziņas<br />
elementi.<br />
Hidropiedziņas<br />
veidi.<br />
Hidropiedziņas<br />
ietaises.<br />
hidropiedziņas<br />
Galvenās<br />
eidi.<br />
v<br />
elektrop<br />
par<br />
ziņas<br />
ažas<br />
D .<br />
edziņu<br />
i<br />
ašīnbūve<br />
M<br />
s<br />
sistēma<br />
vadības<br />
iekārtu<br />
s<br />
ašīnbūve<br />
M<br />
vadības<br />
iekārtu<br />
s<br />
istēmu<br />
s .<br />
eidi<br />
v<br />
vadības<br />
decentralizētās<br />
<strong>un</strong><br />
Centralizētās<br />
sistēmu<br />
Vadības<br />
Komandvadība.<br />
Spēkvadība.<br />
laika.<br />
<strong>un</strong><br />
ceļa<br />
pēc<br />
Vadība<br />
sistēmas.<br />
lementi.<br />
e<br />
a<br />
atorvadīb<br />
D .<br />
utomatizētās<br />
A<br />
e<br />
ašīnbūv<br />
m<br />
e<br />
i<br />
s<br />
s<br />
ārta<br />
k<br />
klasifikācija.<br />
pusautomātu<br />
<strong>un</strong><br />
utomātu<br />
A<br />
utomatizēto<br />
A<br />
e<br />
ašīnbūv<br />
m<br />
tehniski<br />
iekārtu<br />
s<br />
Spēkvadības<br />
veidi.<br />
struktūras<br />
galvenie<br />
automātu<br />
Spēkvadības<br />
rādītāji.<br />
ekonomiskie<br />
sh<br />
vadības<br />
F<strong>un</strong>kcionālās<br />
ražība.<br />
utomātu<br />
a .<br />
mas<br />
ē<br />
automatizētās<br />
omandvadības<br />
K<br />
e<br />
ašīnbūv<br />
m<br />
e<br />
i<br />
s .<br />
ārtas<br />
k<br />
omandvadības<br />
K<br />
e<br />
ašīnbūv<br />
m<br />
s<br />
pusautomāti.<br />
Vadskrūvju<br />
īpatnības.<br />
galvenās<br />
struktūras<br />
f<strong>un</strong>kcionālās<br />
iekārtu<br />
utomatizētās<br />
A<br />
e<br />
ašīnbūv<br />
m<br />
Automatizēto<br />
hidropiedziņu.<br />
ar<br />
iekārtas<br />
s<br />
e<br />
ašīnbūv<br />
m<br />
s<br />
elementi.<br />
ekārtu galvenie<br />
i<br />
ašīnbūve<br />
M<br />
ar<br />
iekārtas<br />
s<br />
u<br />
atorvadīb<br />
d<br />
ator<br />
D<br />
ī<br />
ad<br />
v<br />
as<br />
b<br />
e<br />
ašīnbūv<br />
m<br />
struktūra.<br />
vispārīgā<br />
iekārtu<br />
s<br />
r<br />
ato<br />
D<br />
adības<br />
v<br />
e<br />
ašīnbūv<br />
m<br />
s<br />
klasifikācija.<br />
ekārtu<br />
i<br />
ozīciju<br />
P<br />
r<br />
ato<br />
d<br />
r<br />
Kontū<br />
adība.<br />
v<br />
r<br />
ato<br />
d<br />
adība.<br />
v<br />
r<br />
ato<br />
D<br />
vadības<br />
ašīnbūve<br />
m<br />
vadība.<br />
etapu<br />
piedziņas<br />
iekārtu<br />
s<br />
r<br />
ato<br />
D<br />
adības<br />
v<br />
e<br />
ašīnbūv<br />
m<br />
iekārtu<br />
s<br />
vadība.<br />
soļu<br />
iedziņas<br />
p<br />
r<br />
ato<br />
D<br />
adības<br />
v<br />
e<br />
ašīnbūv<br />
m .<br />
analogvadība<br />
piedziņas<br />
iekārtu<br />
s
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
6<br />
ator<br />
D<br />
adības<br />
v<br />
e<br />
ašīnbūv<br />
m<br />
valodu<br />
Algoritmisko<br />
veidi.<br />
programmēšanas<br />
iekārtu<br />
s<br />
NC<br />
kodi.<br />
Starptautiskie<br />
nozīme.<br />
to<br />
<strong>un</strong><br />
Kodi<br />
vārdi.<br />
izteiksmes,<br />
Komandas,<br />
jēdziens.<br />
CNC<br />
n<br />
u<br />
e<br />
ašīnbūv<br />
m<br />
iekārtas.<br />
s<br />
r<br />
ato<br />
D<br />
adības<br />
v<br />
e<br />
ašīnbūv<br />
m<br />
r<br />
iekā<br />
s .<br />
vadība<br />
u tiešā<br />
t<br />
ašīnbūve<br />
M<br />
ā<br />
sistēm<br />
ražošanas<br />
sabiedriskās<br />
vieta<br />
iekārtu<br />
s<br />
ašīnbūve<br />
M .<br />
elements<br />
sistēmas<br />
ražošanas<br />
sabiedriskās<br />
kā<br />
iekārta<br />
s<br />
Mašīnbūves<br />
zdevumi.<br />
u<br />
e<br />
ašīnbūv<br />
M<br />
perspektīvas.<br />
attīstības<br />
iekārtu<br />
s<br />
veida<br />
ažāda<br />
D<br />
e<br />
ašīnbūv<br />
m<br />
s<br />
ekonomiskā<br />
lietošanas<br />
ekārtu<br />
i .<br />
pretr<strong>un</strong>a<br />
galvenā<br />
Automatizācijas<br />
ietderība.<br />
l
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
7<br />
metodika<br />
iekārtu analīzes<br />
ašīnbūves<br />
M<br />
īpašu<br />
kādu<br />
analizējot<br />
aplūkot<br />
lietderīgi<br />
metodiku<br />
analīzes<br />
iekārtu<br />
Mašīnbūves<br />
frēzmašīnu.<br />
zobu<br />
zobratu<br />
piemēram,<br />
iekārtu,<br />
mašīnbūves<br />
apstrādes<br />
materiālu<br />
tip<br />
šāda<br />
nalizējot<br />
A<br />
nepieciešams<br />
iekārtu,<br />
mašīnbūves<br />
apstrādes<br />
materiālu<br />
a<br />
griešanās<br />
materiālu<br />
ar<br />
veidojot<br />
kustībām virsmu<br />
veidošanas<br />
virsmas<br />
ar<br />
iepazīties<br />
aņēmienu.<br />
p<br />
instrumenta<br />
griešanas<br />
paņēmienu,<br />
griešanas<br />
materiālu<br />
ar<br />
virsmu<br />
veidotu<br />
Lai<br />
att<br />
jāpārvietojas<br />
relatīvi<br />
smenim<br />
a<br />
virsmu<br />
Tātad<br />
virsmu.<br />
veidojamo<br />
pret<br />
iecībā<br />
nepieciešamas<br />
gadījumā<br />
vispārīgā<br />
paņēmienu<br />
griešanas<br />
materiālu<br />
ar<br />
veidošanai<br />
kustības:<br />
ādas<br />
š<br />
<br />
s<br />
irsma<br />
v<br />
s<br />
elementārdaļa<br />
<br />
teorijas<br />
no griešanas<br />
(parasti<br />
kustība<br />
veidošanas<br />
iedokļa<br />
v -<br />
kustība)<br />
riešanas<br />
g –<br />
nebūt<br />
arī<br />
ar<br />
v ;<br />
epieciešama<br />
n<br />
<br />
s<br />
irsma<br />
v<br />
s<br />
aļa<br />
d<br />
griešanas<br />
tad<br />
nav,<br />
kustība<br />
iepriekšējā<br />
(ja<br />
kustība<br />
veidošanas<br />
kustība)<br />
padeves<br />
1.<br />
citādi<br />
ustība,<br />
k - ;<br />
nepieciešama<br />
nebūt<br />
arī<br />
ar<br />
v<br />
<br />
i<br />
va<br />
virsmas<br />
ilnas<br />
p<br />
ā<br />
alīg<br />
g<br />
iepriekšējās<br />
abas<br />
(ja<br />
kustība<br />
veidošanas<br />
virsmas<br />
tad griešan<br />
nav,<br />
ustības<br />
k<br />
tad<br />
nav,<br />
kustība<br />
minētā<br />
pirmā<br />
ja<br />
bet<br />
kustība,<br />
as<br />
kustība)<br />
padeves<br />
2.<br />
citādi<br />
kustība,<br />
adeves<br />
p –<br />
citādi<br />
jo<br />
vajadzīga,<br />
ir<br />
vienmēr<br />
materiālu griešan<br />
ar<br />
irsmu<br />
v a .<br />
izveidot<br />
paņēmienu nevar<br />
s<br />
1. a<br />
shēm<br />
ustību<br />
K<br />
ģeomet<br />
vienkāršas<br />
izmantojot<br />
veidā,<br />
vispārīgā<br />
shēmā<br />
ustību<br />
K<br />
figūras,<br />
riskas<br />
projekcijā)<br />
(dimetriskā<br />
ksonometriski<br />
a<br />
elementi,<br />
tās<br />
<strong>un</strong><br />
virsma<br />
veidojamā<br />
jāattēlo<br />
arī<br />
kā<br />
elements,<br />
veidojošais<br />
nstrumenta<br />
i<br />
bultiņām<br />
r<br />
a - n<br />
u<br />
instrumenta<br />
visas<br />
mašīnbūves<br />
konkrētas<br />
no<br />
jāabstrahējas<br />
sastādot<br />
shēmu<br />
Kustību<br />
kustības.<br />
sagataves<br />
i<br />
a<br />
virsm<br />
veidojamā<br />
detaļas<br />
<strong>un</strong> jāiztēlojas<br />
kārtas<br />
e .<br />
instruments<br />
n nepieciešamais<br />
u<br />
virsmas<br />
sagataves<br />
<strong>un</strong><br />
instrumenta<br />
veidošanā<br />
virsmas<br />
sarežģītības<br />
noteiktas<br />
Kādas<br />
veidojošā<br />
virsmas<br />
instrumenta<br />
no<br />
atkarīgs<br />
ir<br />
raksturs<br />
kustības<br />
relatīvās<br />
veidošanas<br />
-<br />
a<br />
elementārdaļ<br />
irsmas<br />
V<br />
vai<br />
(griešanās<br />
kustību<br />
vienkāršu<br />
ar<br />
izveidot<br />
var<br />
ko<br />
daļa,<br />
virsmas<br />
ir<br />
vai<br />
sarežģītām virsmām (liektām vienā<br />
aplūkojama<br />
ir<br />
parasti<br />
elementārdaļa<br />
Virsmas<br />
taisnvirziena).<br />
realizēta<br />
tikt<br />
var<br />
bet<br />
virzienos),<br />
ivos<br />
d .<br />
virsmām<br />
vienkāršām (plakanām)<br />
uz<br />
rī<br />
a
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
8<br />
form<br />
lementa<br />
e<br />
iekārtas<br />
mašīnbūves<br />
<strong>un</strong><br />
instrumenta<br />
starp<br />
pretr<strong>un</strong>a<br />
vērojama<br />
Te<br />
as.<br />
būt<br />
var<br />
vienkāršāka<br />
jo<br />
instruments,<br />
ir<br />
sarežģītāks<br />
Jo<br />
pakāpēm.<br />
sarežģītības<br />
(<strong>un</strong> otrādi).<br />
iekārta<br />
ašīnbūves<br />
m<br />
kustības:<br />
relatīvās<br />
<strong>un</strong> sagataves<br />
instrumenta<br />
šādas<br />
ātad izšķir<br />
T<br />
L -<br />
n<br />
eleme<br />
irsmas<br />
v ;<br />
kustība<br />
veidošanas<br />
ārdaļas<br />
t<br />
J - ;<br />
kustība<br />
veidošanas<br />
daļas<br />
irsmas<br />
v<br />
V - ;<br />
kustība<br />
veidošanas<br />
virsmas<br />
alīgā<br />
g<br />
G – ;<br />
kustība<br />
egriešanās<br />
i<br />
D – ;<br />
laikā)<br />
cikla<br />
izveidei<br />
(simpleksu<br />
kustība<br />
alīšanas<br />
d<br />
S i – ;<br />
cikla)<br />
(pirms<br />
kustības<br />
estatīšanas<br />
i<br />
P j – .<br />
alīgkustības<br />
p<br />
nalizē<br />
A<br />
virsmas<br />
vienas<br />
aplūkota<br />
tiek<br />
iekārtu<br />
mašīnbūves<br />
apstrādes<br />
materiālu<br />
jot<br />
mašīnbūves<br />
Universālām<br />
elementu.<br />
veidojošo<br />
instrumenta<br />
vienu<br />
ar<br />
veidošana<br />
gadījumā<br />
daudzinstrumentu<br />
bet<br />
veidošana,<br />
virsmu<br />
tipveida<br />
jāizvēlas<br />
ekārtām<br />
i –<br />
instruments<br />
raksturīgākais<br />
iens<br />
v<br />
I<br />
.<br />
tiek<br />
kustības<br />
relatīvās<br />
sagataves<br />
<strong>un</strong><br />
nstrumenta<br />
visas<br />
Ne<br />
cikla).<br />
pirms<br />
(vai<br />
cikliski<br />
notiek<br />
gājieniem <strong>un</strong><br />
izpildelementu<br />
ar<br />
realizētas<br />
var<br />
kustības<br />
Dažas<br />
nepieciešamas.<br />
ir<br />
veidošanai<br />
virsmas<br />
katras<br />
kustības<br />
minētās<br />
et<br />
kustības<br />
citas<br />
kādas<br />
būt<br />
vai<br />
akrist<br />
s<br />
kustību<br />
minimālais<br />
veidošanas<br />
Virsmas<br />
aps.<br />
kustība.<br />
galvenā)<br />
vai<br />
(griešanas<br />
viena<br />
ir<br />
kaits<br />
s<br />
uzsākšanas<br />
cikla<br />
veidošanas<br />
virsmas<br />
pirms<br />
gliemežfrēzi<br />
ar<br />
frēzējot<br />
zobus<br />
Zobratu<br />
sākuma<br />
sagataves<br />
<strong>un</strong><br />
instrumenta<br />
nodrošinātu<br />
lai<br />
kustības,<br />
iestatīšanas<br />
dažas<br />
āveic<br />
j<br />
ir<br />
gadījumā<br />
šajā<br />
kustībām<br />
iestatīšanas<br />
svarīgākām<br />
no<br />
Viena<br />
tāvokli.<br />
s<br />
zoba<br />
vēlams<br />
iespējām<br />
realizēšanas<br />
praktiskās<br />
tās<br />
Ar<br />
kustība.<br />
iestatīšanas<br />
augstuma<br />
Zobu<br />
darbos.<br />
laboratorijas<br />
epazīties<br />
i<br />
<strong>un</strong><br />
instrumenta<br />
no<br />
cikls<br />
veidošanas<br />
virsmas<br />
stāvo<br />
sākuma<br />
agataves<br />
s<br />
u<br />
shēm<br />
kustībām (skat.<br />
padeves<br />
<strong>un</strong><br />
griešanas<br />
ar<br />
sākas<br />
ļa<br />
k<br />
<strong>un</strong><br />
tajā<br />
ierakstus<br />
p<br />
kustības<br />
Padeves<br />
nenotiek.<br />
veidošana<br />
virsmas<br />
sākumā<br />
Protams,<br />
).<br />
etapu.<br />
kustības<br />
padeves<br />
par<br />
uzskatīt<br />
var<br />
kuru<br />
kustība,<br />
iegriešanās<br />
notiek<br />
sākumā<br />
ve<br />
beigām sākas<br />
etapa<br />
iegriešanās<br />
ēc<br />
P<br />
daudziem<br />
veidošana,<br />
daļas<br />
virsmas<br />
idojamās<br />
griezošām<br />
zobu<br />
(gliemežfrēzes<br />
elementiem<br />
veidojošiem<br />
virsmas<br />
gliemežfrēzes
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
šķautnēm) saskaņoti izejot caur veidojamām zobrata zobu spraugām. Zobrata viena<br />
apgrieziena<br />
laikā katra zoba spraugas sākumā veidoj as virsm<br />
as daļa (skat. shēmu) .<br />
Veidojamās<br />
v irsmas daļa<br />
( sadalīta josla)<br />
V 2<br />
J(23)<br />
- griešanas kustība, noslēgta, veido<br />
v irsmas daļu profila virzienā;<br />
Instrumenta<br />
virsmas veidojošais<br />
e lements<br />
J 2<br />
V(12)<br />
- p adeves kustība, nenoslēgta,<br />
v eido galīgo virsmu zobu garen<br />
virzienā;<br />
P 1<br />
( 4), P2( 1), P3 ( 4)<br />
- a ttiecīgās palīgkustības;<br />
S(4)<br />
- z oba augstuma iestatīšanas kustība.<br />
P 1 4<br />
P 2 1<br />
J 3<br />
P 3 4<br />
S 4<br />
Veidojamā<br />
v irsma<br />
V 1<br />
Padeves kustības laikā tā pakāpeniski tiek veidota pilna virsma. Kad pilna virsma ir<br />
izveidota,<br />
k ustības<br />
v eidošanai.<br />
r ealizēšanas<br />
tad<br />
gliemežfrēze<br />
virzienam <strong>un</strong><br />
Ar<br />
zobrata<br />
atkal<br />
ir<br />
jāatvirza<br />
jāpievirza<br />
noņemšanas<br />
no<br />
ja<strong>un</strong>ai<br />
<strong>un</strong><br />
ja<strong>un</strong>as<br />
zobrata,<br />
sagatavei<br />
jāpārvieto<br />
tāda<br />
sagataves<br />
iespējām vēlams iepazīties laboratorijas darbos.<br />
2. V irsmas veidošanas metode<br />
V eidojot<br />
elements<br />
Veidojošā<br />
v ai<br />
ar<br />
v ieta<br />
virsmu<br />
var<br />
būt<br />
līnija<br />
<strong>un</strong><br />
ar<br />
materiālu<br />
vienlaidus<br />
veidojamā<br />
vai<br />
griešanas<br />
pa<br />
virsma<br />
gabaliņiem<br />
griešanas<br />
paņēmienu<br />
sadalīta<br />
procesā<br />
paša<br />
pretēji<br />
zobrata<br />
uzlikšanas<br />
instrumenta<br />
līnija<br />
var<br />
(griezošā<br />
atrasties<br />
padeves<br />
virsmas<br />
praktiskās<br />
veidojošais<br />
šķautne).<br />
nepārtrauktā<br />
periodiskā kontaktā. Pēdējā gadījumā instruments parasti rotē. Veidojošā līnija<br />
veidojamo<br />
virsmu<br />
var<br />
kontaktēt<br />
visā<br />
var pārvietoties pa veidojošo līniju.<br />
garumā<br />
vai<br />
vispārīgā<br />
gadījumā<br />
kontakta<br />
Ja veidojošā līnija šķērso veidojamo virsmu visā platumā, tad virsmas veidošana<br />
n otiek<br />
ar plato nepārtraukta vai perio diska kontakta metodi, bet pretējā gadījumā –<br />
9
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
0<br />
1<br />
iekārtu analīzes<br />
Mašīnbūves<br />
metodi.<br />
kontakta<br />
periodiska<br />
vai<br />
šauro nepārtraukta<br />
ar<br />
ŠPK.<br />
ŠNK <strong>un</strong><br />
PPK,<br />
PNK,<br />
ar<br />
attiecīgi<br />
apzīmēt<br />
var<br />
tās<br />
lankās<br />
b<br />
vienkāršāko<br />
ietojot<br />
L - i<br />
nep<br />
metodi,<br />
NK<br />
P<br />
veidošanas<br />
virsmas<br />
viena<br />
tikai<br />
eciešama<br />
veidošanas<br />
virsmas<br />
divas<br />
vajadzīgas<br />
metodes,<br />
ŠNK<br />
vai<br />
PPK<br />
Lietojot<br />
kustība.<br />
gadījumā<br />
metodes<br />
ŠPK<br />
bet<br />
ustības,<br />
k –<br />
virsmas<br />
trīs<br />
jālieto<br />
gadījumā<br />
vispārīgā<br />
imi<br />
tiek<br />
procesā<br />
veidošanas<br />
virsmas<br />
ja<br />
Taču<br />
kustības.<br />
eidošanas<br />
v<br />
kinemātiskā<br />
tēta<br />
veidošanas<br />
divām virsmas<br />
ar<br />
iztikt<br />
var<br />
gadījumā<br />
ŠPK metodes<br />
arī<br />
tad<br />
kustība,<br />
pāra<br />
piemērā).<br />
aplūkotajā<br />
ir<br />
tas<br />
ustībām (kā<br />
k<br />
jānorāda<br />
blankās<br />
nalizējot<br />
A :<br />
3. a<br />
shēm<br />
zpilddaļas<br />
I<br />
uzdevu<br />
f<strong>un</strong>kcionālā<br />
iekārtu<br />
ašīnbūves<br />
M<br />
izpildelementi.<br />
to<br />
kalpo<br />
izpildei<br />
ma<br />
tieši<br />
palīdzību<br />
kuru<br />
ar<br />
daļas,<br />
kustīgās<br />
tās<br />
iekārtu<br />
mašīnbūves<br />
ir<br />
Izpildelementi<br />
ražošanas<br />
pret<br />
Attiecībā<br />
kustības.<br />
relatīvās<br />
sagataves<br />
<strong>un</strong><br />
instrumenta<br />
realizējas<br />
vienkārš<br />
atrodas<br />
izpildelementi<br />
(korpusu)<br />
statni<br />
ekārtas<br />
i<br />
(tie<br />
kustībā<br />
elementārā<br />
ā<br />
kustību<br />
parādīts<br />
tiek<br />
tas<br />
bultiņām<br />
Ar<br />
kustībā).<br />
taisnvirziena<br />
pārvietojas<br />
vai<br />
rotē<br />
saka<br />
atšķirībai<br />
kā<br />
jeb<br />
kustības,<br />
izpildelementu<br />
Tātad<br />
hēmā.<br />
s –<br />
izpildelementu<br />
relatīva<br />
sagataves<br />
<strong>un</strong><br />
instrumenta<br />
ar<br />
identificēti<br />
tikt<br />
nevar<br />
ājieni,<br />
g<br />
jo<br />
jām kustībām,<br />
nepieciešami<br />
būt<br />
var<br />
kustību<br />
veidošanas<br />
daļas<br />
tās<br />
vai<br />
virsmas<br />
sarežģītu<br />
realizējot<br />
citas<br />
arī<br />
realizēt<br />
var<br />
izpildelements<br />
tam kāds<br />
Bez<br />
gājieni.<br />
izpildelementu<br />
vairāku<br />
Tāt<br />
palīgkustības.<br />
<strong>un</strong><br />
iegriešanās<br />
dalīšanas,<br />
kā<br />
tādas<br />
piemēram,<br />
ustības,<br />
k<br />
arī<br />
ad<br />
PK<br />
Š<br />
veidošanas<br />
Virsmas<br />
etodes<br />
m<br />
Nepārtraukta<br />
metodes<br />
ontakta<br />
k<br />
Periodiska kontakta<br />
etodes<br />
m<br />
aurā<br />
Š<br />
t<br />
epārtrauk<br />
n<br />
a<br />
metode<br />
ontakta<br />
k<br />
latā nepārtraukt<br />
P<br />
a<br />
metode<br />
ontakta<br />
k<br />
Šaurā periodiska<br />
metode<br />
ontakta<br />
k<br />
Platā periodiska<br />
metode<br />
ontakta<br />
k
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
izpildelementi<br />
iet<br />
(kustas)<br />
cikliski<br />
kopējā<br />
virsmas<br />
veidošanas<br />
cikla<br />
ietvaros<br />
vai<br />
arī<br />
p irms<br />
cikla.<br />
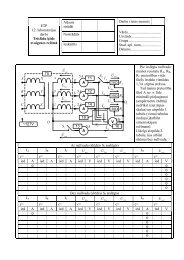
Mašīnbūves<br />
( paralēlskaldnis<br />
v ienkāršotas<br />
Mašīnbūves<br />
iekārtas<br />
izpilddaļas<br />
shēmā<br />
ar<br />
divām<br />
nosacīti<br />
vienkāršām<br />
figūrām<br />
<strong>un</strong> cilindrs) tiek attēlotas aproksimētu izpildelementu kontūras<br />
uz<br />
statnes fona. Tādā veidā lieka informācija analīzes procesā neparādās.<br />
iekārtu<br />
izpildelementus<br />
apzīmē<br />
ar<br />
burtiem<br />
saskaņā<br />
ar<br />
starptautisko<br />
s tandartu ISO 841- 2001<br />
( Industrial<br />
automation systems and integration --<br />
N umerical<br />
control<br />
of machines --<br />
C oordinate system and motion nomenclature)<br />
.<br />
T iek lietota Dekarta taisnleņķu labā k oordinātu sistēma:<br />
- t aisnvirziena gājieniem<br />
- griešanā<br />
s gājieniem<br />
X , Y, Z – p rimārās koordinātes;<br />
U , V, W – s ek<strong>un</strong>dārās koordinātes;<br />
P , Q, R – t erciārās koordinātes<br />
A , B, C – a p X, Y <strong>un</strong> Z;<br />
D , E – p apildus griešanās<br />
<strong>Par</strong><br />
koordinātu<br />
instruments<br />
l abais.<br />
<strong>un</strong><br />
asu<br />
sagatave<br />
pozitīvajiem<br />
attālinās<br />
virzieniem<br />
viens<br />
no<br />
otra.<br />
tiek<br />
pieņemti<br />
Griešanās<br />
tie<br />
pozitīvais<br />
virzieni,<br />
virziens<br />
Koordinātu asis, pa kurām pārvietojas<br />
ar sagatavi saistītie izpildelementi,<br />
v irzītas pretēji k oordinātu asīm, ar kurām saistīts instruments<br />
v irzienā) . Tās apzīmē ar tiem pašiem burtiem <strong>un</strong> augšējo indeksu (′).<br />
M inētais<br />
tiek<br />
izvēlēta<br />
standarts<br />
Z<br />
ass.<br />
nosaka<br />
Tās<br />
arī<br />
koordinātu<br />
virzienu<br />
pārsvarā<br />
izvēles<br />
noteikumus<br />
nosaka<br />
<strong>un</strong><br />
(it<br />
kā<br />
secību.<br />
perpendikulāri<br />
vai<br />
kad<br />
ir<br />
negatīvā<br />
Kā<br />
pirmā<br />
paralēli<br />
sagataves bāzēšanas plaknei, kas uz attiecīgā izpildelementa tiek īpaši atzīmēta. X<br />
a si<br />
parasti<br />
v irzienu<br />
izvēlas<br />
horizontāli<br />
<strong>un</strong><br />
paralēli<br />
nosaka Dekarta labā koordinātu sistēma.<br />
sagataves<br />
bāzēšanas<br />
plaknei.<br />
Y<br />
ass<br />
11
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
C ’.DAZX<br />
X<br />
X<br />
Z<br />
Z<br />
A<br />
D<br />
Y<br />
X<br />
C ’<br />
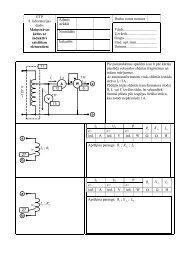
4. F <strong>un</strong>kcionālā struktūras shēma<br />
Jebkura<br />
m ateriāla<br />
f<strong>un</strong>kcionālā<br />
shēma<br />
satur<br />
sistēmas<br />
elementu<br />
plūsmu attēlojumu. Tiek piedāvāti šādi apzīmējumi:<br />
<strong>un</strong><br />
informācijas<br />
enerģijas<br />
<strong>un</strong><br />
M<br />
- e lektromotors<br />
- r eversa mehānisms<br />
- p ārnesuma attiecības izmaiņas mehānisms<br />
- s ajūgs<br />
- r okas piedziņas elements<br />
P<br />
- p rogrammators<br />
X<br />
- i zpildelements<br />
M<br />
X<br />
- f <strong>un</strong>kcionālā grupa<br />
12
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
3<br />
1<br />
tam<br />
nepieciešams<br />
shēmu,<br />
struktūras<br />
f<strong>un</strong>kcionālo<br />
iekārtas<br />
mašīnbūves<br />
uzzīmētu<br />
Lai<br />
zināmu<br />
ievērojot<br />
shēmā,<br />
struktūras<br />
F<strong>un</strong>kcionālajā<br />
analīzi.<br />
turpināt<br />
<strong>un</strong><br />
vietu<br />
paredzēt<br />
re<br />
sagataves<br />
<strong>un</strong><br />
(instrumenta<br />
ārtību<br />
k<br />
veidošanas<br />
virsmas<br />
secību<br />
kustību<br />
latīvo<br />
tā<br />
jāattēlo<br />
pirmo<br />
kā<br />
gadījumā<br />
kustību<br />
Saliktu<br />
grupas.<br />
f<strong>un</strong>kcionālās<br />
jāattēlo<br />
procesā)<br />
visas<br />
nosaka<br />
aptuveni<br />
kuras<br />
(pēc<br />
kustību<br />
vedošo<br />
nodrošina<br />
kas<br />
grupa,<br />
f<strong>un</strong>kcionālā<br />
parametrus).<br />
galvenos<br />
ustības<br />
k<br />
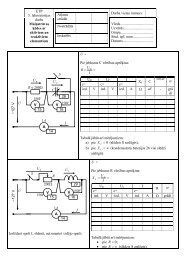
5. a<br />
grup<br />
saikņu<br />
aprēķina<br />
kustības<br />
riešanas<br />
G<br />
sagataves<br />
<strong>un</strong><br />
instrumenta<br />
cik<br />
grupas,<br />
saikņu<br />
aprēķina<br />
tik<br />
jāapskata<br />
ka<br />
jāatzīmē,<br />
Te<br />
virsmas<br />
analizējamo<br />
visu<br />
realizētu<br />
lai<br />
nepieciešamas,<br />
ir<br />
kustības<br />
relatīvās<br />
Kat<br />
sagatavošanu).<br />
tā<br />
(arī<br />
procesu<br />
eidošanas<br />
v<br />
nosaka<br />
grupa<br />
saikņu<br />
aprēķina<br />
ra<br />
iestatīšanu.<br />
gājienu parametru<br />
attiecīgo izpildelementu<br />
kustības<br />
ādas<br />
k<br />
ietilpst:<br />
saikņu grupā<br />
prēķina<br />
A<br />
A<br />
a<br />
nosak<br />
kura<br />
saikne,<br />
Ātruma<br />
.<br />
ātrumu;<br />
izpildelementa<br />
vedošā<br />
)<br />
a<br />
virzienu.<br />
izpildelementa<br />
vedošā<br />
)<br />
b<br />
M<br />
2<br />
1<br />
M<br />
P<br />
D<br />
’<br />
C<br />
Z<br />
X<br />
<br />
+ - i z i 0<br />
i f<br />
v<br />
i p<br />
i v
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
4<br />
1<br />
B. u<br />
k<br />
veidsaikne,<br />
pēka<br />
S<br />
a<br />
nosak<br />
a<br />
r<br />
)<br />
a<br />
o<br />
vedoš<br />
pret<br />
attiecībā<br />
(ātrumu)<br />
pārvietojumu<br />
relatīvo<br />
izpildelementa<br />
saistītā<br />
zpildelementu;<br />
i<br />
vedošo<br />
pret<br />
relatīvo virzienu attiecībā<br />
izpildelementa<br />
saistītā<br />
b)<br />
zpildelementu;<br />
i<br />
pret<br />
attiecībā<br />
stāvokli<br />
sākuma<br />
relatīvo<br />
izpildelementa<br />
saistītā<br />
)<br />
c<br />
vedošo<br />
zpildelementu.<br />
i<br />
C<br />
a<br />
nosak<br />
kura<br />
saikne,<br />
Stāvokļa<br />
.<br />
ceļu;<br />
)<br />
a<br />
stāvokli.<br />
sākuma<br />
)<br />
b<br />
iegriešanās<br />
<strong>un</strong><br />
kustības<br />
veidošanas<br />
virsmas<br />
analizējot<br />
aplūkota<br />
tiek<br />
saikne<br />
Ātruma<br />
vienkāršām<br />
par<br />
ka<br />
Jāatzīmē,<br />
kustībām.<br />
saliktām<br />
ir<br />
veidsaikne<br />
spēka<br />
bet<br />
kustību,<br />
ustībām t<br />
k<br />
tiek<br />
kustības<br />
Pārējās<br />
kustības.<br />
rotācijas<br />
<strong>un</strong><br />
taisnvirziena<br />
pieņemtas<br />
iek<br />
viens<br />
realizēt<br />
var<br />
parasti<br />
kustības<br />
Vienkāršas<br />
sarežģītām kustībām.<br />
par<br />
uzskatītas<br />
tās<br />
ka<br />
saka,<br />
tad<br />
izpildelementi,<br />
vairāki<br />
realizē<br />
kustības<br />
sarežģītas<br />
Ja<br />
izpildelements.<br />
saliktas<br />
r<br />
i<br />
viens<br />
realizē<br />
kustību<br />
sarežģītu<br />
ka<br />
gadījumi,<br />
būt<br />
Mēdz<br />
kustības.<br />
vienkāršas<br />
iespējama<br />
Tāpat<br />
tēsējmažīnās.<br />
zobratu<br />
piemēram,<br />
izpildelements,<br />
<strong>un</strong>iversālās<br />
piemēram,<br />
izpildelementiem,<br />
diviem<br />
ar<br />
realizēšana<br />
kustības<br />
sali<br />
<strong>un</strong><br />
sarežģītas<br />
Tātad<br />
virpās.<br />
ītņgriešanas<br />
v<br />
identiski.<br />
nav<br />
jēdzieni<br />
kustības<br />
ktas<br />
veidošanas<br />
virsmas<br />
(dažām<br />
kustībām<br />
nenoslēgtām<br />
jāanalizē<br />
saikne<br />
Stāvokļa<br />
kustībai).<br />
dalīšanas<br />
<strong>un</strong><br />
kustībai<br />
iegriešanās<br />
ustībām,<br />
k<br />
apakšpu<br />
saikņu<br />
prēķina<br />
A<br />
IP,<br />
(ātrumi)<br />
pārvietojumi<br />
izvēlētie<br />
sastādīti<br />
tiek<br />
(a)<br />
nktos<br />
avotu<br />
enerģijas<br />
starp<br />
nodrošināšanai<br />
saiknes<br />
noteikumus<br />
nepieciešamos<br />
nosaka<br />
kas<br />
kustībai<br />
(saliktai<br />
izpildelementu<br />
n<br />
u –<br />
<strong>un</strong><br />
vedošo<br />
starp<br />
arī<br />
kā<br />
izpildelementu)<br />
vedošo<br />
spēka<br />
izpildelementu<br />
aistīto<br />
s<br />
<strong>un</strong><br />
ir)<br />
tāds<br />
(ja<br />
<strong>programma</strong>toru<br />
starp<br />
vai<br />
veidsaiknē<br />
saiknē.<br />
nenoslēgtu kustību stāvokļa<br />
ar<br />
ttiecīgo izpildelementu<br />
a<br />
kinemātisko<br />
iekārtas<br />
mašīnbūves<br />
analizējamās<br />
izmantojot<br />
sastādīšanas,<br />
IP<br />
Pēc<br />
vienādoj<br />
pārvērš<br />
IP<br />
kas<br />
SV,<br />
vienādojums<br />
saikņu<br />
jāsastāda<br />
hēmu,<br />
s<br />
Atrisinot<br />
umā.
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
5<br />
1<br />
iestatīšanas<br />
noteikta<br />
tiek<br />
parametru<br />
elementa<br />
iestatīšanas<br />
nezināmo<br />
uz<br />
SV attiecībā<br />
IF.<br />
ormula<br />
f<br />
uz<br />
atbildot<br />
kā<br />
it<br />
vārdiski<br />
aprakstīti<br />
tiek<br />
(c)<br />
<strong>un</strong><br />
(b)<br />
apakšp<strong>un</strong>kti<br />
saikņu<br />
Aprēķina<br />
varianti<br />
iestatīšanas<br />
ir<br />
kādi<br />
kāpēc<br />
vajag<br />
vai<br />
autājumiem:<br />
j<br />
6. a<br />
grup<br />
aprēķina saikņu<br />
kustības<br />
adeves<br />
P<br />
analizējot<br />
Ja<br />
grupām.<br />
pārējām saikņu<br />
<strong>un</strong><br />
šo<br />
uz<br />
attiecas<br />
mērā<br />
pilnā<br />
iepriekš<br />
Teiktais<br />
iespējamās<br />
noteikt<br />
skaitliski<br />
nepieciešams<br />
ir<br />
iekārtās,<br />
mašīnbūves<br />
<strong>un</strong>iversālās<br />
saikn<br />
tad<br />
vērtības,<br />
trumu<br />
ā<br />
ātrumu,<br />
vajadzīgo<br />
uz<br />
attiecībā<br />
jāatrisina<br />
vienādojums<br />
es<br />
(23)<br />
J<br />
.<br />
A<br />
)<br />
a<br />
P<br />
I<br />
n<br />
m<br />
M<br />
pgr/min<br />
a<br />
n<br />
D<br />
D<br />
pgr/min<br />
a n<br />
(<br />
=<br />
D ;<br />
d D<br />
1000v<br />
<br />
)<br />
V<br />
S<br />
D<br />
v<br />
n<br />
64<br />
16<br />
17<br />
17<br />
24<br />
24<br />
24<br />
24<br />
i<br />
48<br />
32<br />
0,98<br />
224<br />
105<br />
420<br />
1 <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
F<br />
I<br />
109<br />
D<br />
v<br />
n<br />
i ;<br />
ģitār<br />
parazītzobratu<br />
ar<br />
dorņa;<br />
pie<br />
sagatavi<br />
D piespiež<br />
lai<br />
vajag,<br />
)<br />
b<br />
i<br />
ā v .<br />
.<br />
B<br />
)<br />
a<br />
P<br />
I<br />
z D<br />
1<br />
D<br />
pgr.<br />
a z 1<br />
C’<br />
pgr.<br />
a<br />
V<br />
S<br />
z<br />
1<br />
96<br />
1<br />
i<br />
i<br />
46<br />
46<br />
24<br />
24<br />
24<br />
24<br />
17<br />
17<br />
16<br />
64<br />
z<br />
1<br />
z<br />
0<br />
D<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
F<br />
I ;<br />
0<br />
D<br />
z<br />
i<br />
z<br />
24z<br />
i<br />
<br />
<br />
frēze;<br />
kreisā<br />
vai<br />
labā<br />
būt<br />
var<br />
jo<br />
vajag,<br />
)<br />
b<br />
i<br />
ģitārā<br />
parazītzobratu<br />
r<br />
a z;<br />
o<br />
relatīvā<br />
ir<br />
svarīga<br />
jo<br />
vajag,<br />
)<br />
c<br />
i<br />
ģitārā<br />
pārtraukumu<br />
ķēdes<br />
ar<br />
ientācija;<br />
r z.<br />
noslēgta.<br />
ir<br />
jo kustība<br />
nenosaka,<br />
Stāvokli<br />
.<br />
C
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
par<br />
argumentu<br />
izvēloties<br />
iestatīšanas<br />
elementa<br />
diskrētu<br />
parametru<br />
(pārnesumu<br />
attiecību<br />
- p akāpjveida vadības gadījumā) .<br />
V (12)<br />
A .<br />
a )<br />
I P<br />
S V<br />
n<br />
m<br />
apgr/min<br />
M v<br />
fm<br />
m /min Z ( 1 apgr. C’ v fo<br />
m m Z)<br />
105 32 46 2 45 19 16 4 5<br />
1420<br />
0,98 iv<br />
1i0<br />
iz<br />
ivf<br />
10<br />
v<br />
224 48 46 24 36 19 16 20 30<br />
96<br />
1<br />
2<br />
. )<br />
24<br />
( 1 ..<br />
v f 0<br />
vfm<br />
I F ivf<br />
;<br />
1,54 i<br />
i<br />
i<br />
( 3 vf0<br />
ivf<br />
<br />
10<br />
; )<br />
v<br />
0<br />
z<br />
fm<br />
b)<br />
vajag, jo var frēzēt pa vai pret padevi; ar parazītzobratu ģitārā i f<br />
v .<br />
B .<br />
a )<br />
I P p z<br />
mm Z 1 apgr. C’<br />
1 30 20 16 19 36 1<br />
1<br />
S V pz<br />
ip<br />
2 i0<br />
iz<br />
1<br />
10 5 4 16 19 45 30 96<br />
I F<br />
i p<br />
25 sin<br />
<br />
m <br />
z D<br />
ievērojot<br />
iz<br />
<strong>un</strong> to, ka<br />
p z<br />
m<br />
z<br />
;<br />
sin<br />
b)<br />
c )<br />
vajag, jo jāfrēzē labais <strong>un</strong> kreisais slīpzobu<br />
zobrats; ar parazītzobratu ģitārā ip.<br />
nevajag, jo kinemātiskajā ķēdē ir summēšanas mehānisms.<br />
C .<br />
a )<br />
b )<br />
pusautomātiskā režīmā nodrošina komandatdure;<br />
pusautomātiskā režīmā nodrošina komandatdure.<br />
7. I egriešanās kustības aprēķina saikņu grupa<br />
G(<br />
) ir padeves kustības V(12)<br />
e taps<br />
8. D alīšanas kustības aprēķina saikņu grupa<br />
D ( ) ≡ J(23)<br />
16
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
7<br />
1<br />
orādījum<br />
N i i<br />
darbu veikšana<br />
raktisko<br />
p<br />
veic<br />
studenti<br />
laikā<br />
darbu<br />
raktisko<br />
P<br />
s<br />
datorvadība<br />
ādas<br />
k e<br />
ašīnbūv<br />
m<br />
s<br />
iekārta<br />
s<br />
analīzi,<br />
piedāvāto<br />
zmantojot<br />
i<br />
e<br />
ašīnbūv<br />
m<br />
n<br />
a<br />
iekārtu<br />
s<br />
secību.<br />
vēlamo<br />
<strong>un</strong><br />
metodiku<br />
alīzes<br />
detaļas<br />
kādas<br />
veic<br />
<strong>un</strong><br />
pamatprincipiem<br />
datorvadības<br />
ar<br />
iepazīstas<br />
Studenti<br />
T<br />
frēzējot.<br />
<strong>un</strong><br />
virpojot<br />
izveidi<br />
<strong>programma</strong>s<br />
vadības<br />
zgatavošanas<br />
i<br />
veikts<br />
ek<br />
i<br />
arī<br />
ašīnbūve<br />
m<br />
t<br />
iekār<br />
s<br />
s<br />
a<br />
elementa<br />
svarīgākā<br />
iedziņas<br />
p – i<br />
aprēķ<br />
trumkārbas<br />
ā .<br />
s<br />
n<br />
modeļa<br />
āzes<br />
B<br />
apstrādes<br />
ateriālu<br />
m<br />
e<br />
ašīnbūv<br />
m<br />
e<br />
analīz<br />
iekārtas<br />
s<br />
metode.<br />
veidošanas<br />
virsmas<br />
<strong>un</strong><br />
shēma<br />
ustību<br />
K<br />
e<br />
ašīnbūv<br />
M<br />
izpilddaļas<br />
iekārtas<br />
s<br />
ttēls.<br />
a<br />
e<br />
ašīnbūv<br />
M<br />
izmēra<br />
<strong>un</strong><br />
Veidkustību<br />
shēma.<br />
struktūras<br />
f<strong>un</strong>kcionālās<br />
iekārtas<br />
s<br />
Ā<br />
analīze.<br />
saikņu<br />
aprēķina<br />
ustību<br />
k .<br />
novietojums<br />
rumkārbas<br />
t<br />
noteikšana<br />
galveno parametru<br />
akāpju ātrumkārbas<br />
P<br />
ātruma<br />
minimālā<br />
rotācijas<br />
darbvārpstas<br />
<strong>un</strong><br />
diapazona<br />
regulēšanas<br />
Ātrumkārbas<br />
Ātrumkārbas<br />
diapazons.<br />
regulēšanas<br />
<strong>un</strong><br />
raksturojums<br />
Pārvadu grupas<br />
noteikšana.<br />
vari<br />
tā<br />
<strong>un</strong><br />
grafiks<br />
truktūras<br />
s .<br />
izvēle<br />
Elektrodzinēja<br />
nti.<br />
a<br />
grafiks<br />
truma<br />
Ā<br />
Pārvadu<br />
rinda.<br />
skaitļu<br />
Standarta<br />
rinda.<br />
ģeometriskā<br />
ātruma<br />
rotācijas<br />
Darbvārpstas<br />
princips.<br />
redukcijas<br />
Pakāpeniskās<br />
pārvadu grupās.<br />
attiecību noteikšana<br />
pārnesuma<br />
zīmēšana.<br />
grafika<br />
truma<br />
Ā<br />
zoba skaita note<br />
obratu<br />
Z<br />
a<br />
kšan<br />
i<br />
pārvadu<br />
Reducējošo <strong>un</strong> paātrinošo<br />
zobrats.<br />
azākais<br />
M<br />
starprasu<br />
minimālais<br />
skaita<br />
Zobu<br />
aprēķins.<br />
skaita<br />
zobu<br />
Zobratu<br />
attālums.<br />
starprasu<br />
Standarta<br />
attālums.<br />
attiecība.<br />
pārnesumu<br />
Faktiskā<br />
oapaļošana.<br />
n<br />
arbvārpstas<br />
D<br />
aktiskā<br />
f<br />
ātruma<br />
rotācijas<br />
inda<br />
r .
ašīnbūves<br />
M<br />
t<br />
ekār<br />
i<br />
a<br />
<strong>un</strong> vadīb<br />
piedziņa<br />
u<br />
8<br />
1<br />
iedz<br />
P<br />
s<br />
aprēķin<br />
jaudas<br />
ņas<br />
i<br />
koeficients.<br />
Lietderības<br />
jauda.<br />
ukšgaitas<br />
T<br />
koeficienta<br />
Lietderības<br />
jauda.<br />
Efektīvā<br />
iespējas.<br />
alielināšanas<br />
p<br />
analīze<br />
tas<br />
shēma <strong>un</strong><br />
kinemātiskā<br />
iedziņas<br />
P<br />
ar<br />
salīdzināšana<br />
shēmas<br />
kinemātiskās<br />
Piedziņas<br />
shēmās.<br />
kinemātiskās<br />
Apzīmējumi<br />
ttie<br />
a<br />
īgās<br />
c<br />
e<br />
ašīnbūv<br />
m .<br />
shēmu<br />
kinemātisko<br />
modeļa<br />
bāzes<br />
iekārtas<br />
s
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
<strong>Studiju</strong><br />
T ipveida<br />
iestatīšanas<br />
darba i zpildes kārtība<br />
uzdevums:<br />
elementa<br />
Veikt<br />
h = ____ mm / maksimālais<br />
j auda<br />
ir<br />
N<br />
darbvārpstas<br />
=<br />
____<br />
kW<br />
maksimālais<br />
virpas/urbjmašīnas<br />
_______<br />
analīzi<br />
<strong>un</strong><br />
aprēķināt<br />
( ā trumkārbas) p arametrus, ja centru augstums<br />
<strong>un</strong><br />
urbšanas<br />
ā trumkārbai<br />
diametrs<br />
a r<br />
d<br />
m ax<br />
= ____ mm, elektrodzin<br />
pakāpveida<br />
vadīšanu<br />
rotācijas<br />
ātrums n m ax<br />
= ______<br />
a pgr./min.<br />
s truktūra z = _ [_]·_ [_]·_ [_]·_ [_] <strong>un</strong> ģeometriskās rindas kv<br />
ocients φ = __ .<br />
ēja<br />
jānodrošina<br />
Vēlamā<br />
1. Kustības shēmas zīmēšana virpojot cilindrisku bezpakāpes virsmu ar<br />
virpošanas<br />
s pirālurbi.<br />
griezni/urbjot<br />
vai<br />
paplašinot<br />
2. V irsmas veidošanas metodes noteikšana.<br />
caurejošu/necaurejošu<br />
urbumu<br />
ar<br />
3. B āzes modeļa darbmašīnas izpilddaļas shēmas zīmēšana<br />
e lementa<br />
(ātrumkārbas) novietojuma identificēšana.<br />
4. F <strong>un</strong>kcionālās struktūras shēmas zīmēšana.<br />
5. G riešanas kustības aprēķina saikņu noteikšana.<br />
6. P adeves kustības aprēķina saikņu noteikšana.<br />
7. P ārējo kustību aprēķina saikņu noteikšana.<br />
<strong>un</strong><br />
iestatīšanas<br />
8. D arbvārp stas rotācijas ātruma regulēšanas diapazona noteikšana:<br />
R <br />
z1 .<br />
nmax<br />
9. D arbvārpstas minimālā rotācijas ātruma noteikšana:<br />
n .<br />
min<br />
R n<br />
n<br />
10. I estatīšanas elementa pārvadu<br />
grupas<br />
maksimāli<br />
pieļaujam<br />
regulēšanas<br />
d iapazona <strong>un</strong> staru slīpuma noteik<br />
šana.<br />
19
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
φ 1 ,06<br />
1 ,12<br />
1 ,25<br />
1 ,40<br />
1 ,60<br />
1 ,80<br />
2 .00<br />
[ u i ] 36<br />
18<br />
9 6 4 3 3<br />
[ m1] 12<br />
6 3 2 1 1 1<br />
[ m2] 24<br />
12<br />
6 4 3 2 2<br />
11. Pārvadu<br />
grupu raksturojuma noteikšana vismaz 4- i em struktūras variantiem:<br />
x<br />
1;<br />
xk<br />
p1<br />
p2<br />
...<br />
pk<br />
1.<br />
1 <br />
12. Struktūras<br />
grafiku zīmēšana vismaz 4-i<br />
em struktūras<br />
variantiem <strong>un</strong> labākā<br />
v arianta<br />
izvēle.<br />
13. Izvēlētā<br />
varianta vi su pārvadu grupu regulēšanas diapazona<br />
n oteikšana:<br />
u<br />
i<br />
<br />
( pi<br />
i<br />
1)<br />
x .<br />
14. Ātruma grafika zīmēšana, ievērojot pakāpeniskās redukcijas principu.<br />
Rotācijas<br />
ātrumu norādīšanai<br />
noderīga<br />
ir skaitļ u st<br />
andartrinda:<br />
1 ,00;1,06;1,12;1,18;1,25;1,32;1,40;1,50;1,60;1,70;1,80;1,90;<br />
2 ,00;2,12;2,24;2,36;2,50;2,65;2,80;<br />
3 ,00; 3 ,15;3,35;3,55;3,75;<br />
4 ,00;4,25;4,50;4,75;<br />
5 ,00;5,30;5,60;<br />
6 ,00;6,30;6,70;<br />
7 ,10;7,50;<br />
8 ,00;8,50;<br />
9 ,00;9,50;<br />
10,00.<br />
15. E lektrodzinēja izvēle <strong>un</strong> iespējamā<br />
siksnas pārvada pārnesumu attiecības<br />
nI<br />
n oteikšana:<br />
i<br />
p<br />
,<br />
n<br />
m<br />
20
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
k ur n<br />
I<br />
-<br />
n<br />
m<br />
-<br />
i estatīšanas elementa pirmās (ieejas) vārpstas rotācijas ātrums;<br />
e lektrodzinēja rotācijas ātrums.<br />
16. V isu pārvadu<br />
pārnesumu attiecību noteikšana visās pārvadu grupās (līdz 24.<br />
p <strong>un</strong>ktam – k atrā<br />
pārvadu grupā<br />
):<br />
i<br />
j<br />
i<br />
j<br />
m<br />
<br />
1<br />
- p aātrinošiem pārvadiem;<br />
m<br />
<br />
2<br />
- r educējošiem pārvadiem.<br />
17. Z obratu zobu moduļa izvēle atkarībā<br />
no jaudas.<br />
18. Z obrata minimā<br />
lā zobu skaita izvēle k atrā pārvadu grupā ( z 14..17<br />
).<br />
19. P ārvada ar maksimālo pārnesumu attiecību identificēšana<br />
katrā pārvadu<br />
g rupā.<br />
20. Minimālā<br />
starpasu attāluma noteikšana<br />
k atrā pārvadu grupā:<br />
min<br />
a<br />
min<br />
0,5<br />
m zmi<br />
n<br />
(1 u),<br />
1<br />
k ur u max{i<br />
jmax<br />
, }; i<br />
jmax<br />
0; i<br />
jmin<br />
0;<br />
i<br />
jmin<br />
21. Minimālā starpasu attāluma noapaļošana līdz tuvākajai standartizētai vērtībai<br />
( uz<br />
augšu):<br />
a 40;50;63;80;100;125;(140;)160;(180;)200;(225;)250;(280;)315;(355;)400 ;<br />
( 450;)500;(560;) 630.<br />
22. Z obratu zobu skaita aprēķins:<br />
z<br />
j<br />
2 a i<br />
j<br />
d zenošam zobratam;<br />
m(1<br />
i )<br />
j<br />
z<br />
'<br />
j<br />
2 a<br />
d zītajam zobratam.<br />
m(1<br />
i )<br />
j<br />
21
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
23. Z obratu zobu skaita noapaļošana pārvadiem:<br />
a )<br />
vai nu vienam uz augšu <strong>un</strong> otram uz leju,<br />
b ) vai nu abiem uz leju,<br />
veicot zobu augstuma korekciju.<br />
24. Z obratu pārvadu faktiskās pārnesumu attiecības noteikšana (ja visās<br />
pārvadu<br />
g rupās<br />
tas nav izdarīts, tad atgriezties pie 16. p<strong>un</strong>kta):<br />
z<br />
j<br />
i<br />
jfakt<br />
.<br />
'<br />
z<br />
j<br />
25. D arba vārpstas faktiskās rotācijas ātruma rindas noteikšana:<br />
n<br />
k<br />
n<br />
m<br />
i<br />
kop<br />
; k 1,2,..., z,<br />
k ur i<br />
kop<br />
- k opējā piedziņas pārnesumu attiecība attiecīgi pārslēdzoties<br />
<strong>un</strong> ievērojot<br />
i<br />
p<br />
<strong>un</strong><br />
i<br />
jfakt<br />
.<br />
26. D arba vārpstas rotācijas ātrumu relatīvo noviržu no standartizētām vērtībām<br />
n oteikšana:<br />
nk<br />
nst<br />
100% .<br />
n<br />
st<br />
27. Darba vārpstas rotācijas ātrumu relatīvo noviržu salīdzināšana ar<br />
[ ] 2%...<br />
3%<br />
k ā noteikts ISO<br />
229: 1987.<br />
28. Tukšgaitas<br />
jaudas aprēķins, ja<br />
n k<br />
n ma x<br />
:<br />
N<br />
tg<br />
d<br />
dv<br />
ke<br />
d<br />
v<br />
( nI nI<br />
...<br />
kdv<br />
nmax<br />
,<br />
d<br />
v<br />
k ur k<br />
e<br />
- k oeficients, lai ievērotu eļļošanas apstākļus (3..5);<br />
d<br />
v<br />
-<br />
( 0,03..0,04<br />
mašīnbūves<br />
iekārtu iestatīšanas elementu vārpstu vidējais diametrs<br />
m);<br />
n<br />
I<br />
, n I I,...<br />
- iestatīšanas<br />
elementa starpvārpstu attiecīgie rotācijas ātrumi, ja<br />
22<br />
n k<br />
n ma x<br />
;
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
k - koeficients,<br />
lai ievērotu<br />
d arba vārpstas<br />
g ultņu īpatnības ( 1 ,5 – rites<br />
dv<br />
g ultņiem; 2,0 – s līdes gultņiem) ;<br />
d - darba vārpstas diametrs (0,05..0,10 m virpām; 0,05..0,08 m<br />
dv<br />
u rbjmašīnām).<br />
29. Iestatīšanas elementa lietderības koeficienta noteikšana, ievērojot slodzes<br />
j audas<br />
zudumus v isos piedziņas elementos (0,970 – ķīļsiksnas pārvadam;<br />
0 ,995..0,997 –<br />
30. E fektīvās jaudas noteikšana:<br />
r ites gultņiem; 0,970..0,980 – s līdes gultņiem)<br />
.<br />
N<br />
ef<br />
N N ) .<br />
(<br />
tg<br />
31. Galveno<br />
aprēķina rezultātu sakopošana<br />
aprēķinu<br />
t abulā<br />
( skat. turpmāk) .<br />
32. P iedziņas kinemātiskās<br />
shēmas zīmēšana, iestatīšanas elementa <strong>un</strong><br />
d arbmašīnas<br />
tehnoloģisko iespēju analīze.<br />
23
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
A prēķinu tabula<br />
N r otācij a<br />
n<br />
F aktiskā r otācij a<br />
Aprēķina<br />
z obu skaits<br />
ominālāz<br />
N oapaļotais<br />
obu skaits<br />
nk<br />
elatīvā novirze<br />
<br />
R<br />
ovērtējums<br />
N<br />
ārvadu<br />
g rupa<br />
P<br />
tarpasu<br />
S<br />
a ttālums a<br />
prēķina<br />
A<br />
ij<br />
z j z j z j z j <br />
aktiskais<br />
F<br />
i j fak t<br />
z =3[ ] 2[<br />
] 2[<br />
] 2[<br />
]<br />
a<br />
b<br />
c<br />
d<br />
24
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
N orādījumi<br />
L aboratorijas<br />
kad<br />
tiek<br />
L aboratorijas<br />
e ksperimenta<br />
L aboratorijas<br />
jāiepazīstas<br />
jāveic<br />
V isu<br />
laboratorijas darbu veikšanai<br />
darbi ir viens no apgūto teorētisko zināšanu nostiprināšanas veidiem,<br />
izmantotas<br />
darbu<br />
dažādas<br />
laikā<br />
tiek<br />
iekārtas<br />
iepazīta<br />
<strong>un</strong><br />
veikti<br />
teorijas<br />
<strong>un</strong> zinātniskās pētniecības iemaņas.<br />
darbiem<br />
studentam<br />
jāsagatavojas<br />
<strong>un</strong><br />
laboratorijas<br />
savlaicīgi:<br />
prakses<br />
izmēģinājumi.<br />
saistība,<br />
jāsagatavo<br />
apgūtas<br />
protokols,<br />
ar attiecīgās m ašīnbūves<br />
iekārtas uzbūvi <strong>un</strong> tehnoloģiskajām iespējām,<br />
atbilstošās m ašīnbūves<br />
iekārtas analīzi.<br />
veidu<br />
M ateriālu<br />
Laboratorijas<br />
m etodika.<br />
Laboratorijas<br />
apmācības<br />
apstrādes<br />
darbos<br />
darbu<br />
studenti<br />
tehnoloģijas<br />
pēc<br />
individuālā<br />
katedras<br />
grafika<br />
D atorvadība<br />
jāizmanto m ašīnbūves<br />
iekārtu<br />
beidzot,<br />
j āveic<br />
eksperimenta<br />
apraksti<br />
laboratorijas<br />
rezultātu<br />
darbmašīnu<br />
<strong>un</strong><br />
piedāvātā<br />
apstrāde<br />
darbus<br />
veic<br />
laboratorijā.<br />
<strong>un</strong><br />
analīzes<br />
darba<br />
aizs<br />
tāvēšana.<br />
Neskaidru jautājumu gadījumā darba aizstāvēšana var aizkavēties līdz<br />
n ākoša<br />
darba sākumam.<br />
Datorvadības<br />
darbmašīnu<br />
la boratorijā<br />
tiek piedāvāta šāda darbu tematika:<br />
1. D atorvadības mašīnbūves iekārtu pārbaudes.<br />
2. Datorvadības<br />
fr<br />
ēzmašīnas izpilddaļas <strong>un</strong><br />
kinemātiskās shēmas analīze,<br />
i ekārtas<br />
iestatīšana.<br />
3. Da<br />
torvadības virpas<br />
izpilddaļas <strong>un</strong> kinemātiskās shēmas analīze, iekārtas<br />
i estatīšana.<br />
4. Datorvadības<br />
frēzmašīnas<br />
v adības <strong>programma</strong>s izveidošana <strong>un</strong> pārbaude.<br />
5. D atorvadības virpas vadības <strong>programma</strong>s izveidošan<br />
a <strong>un</strong> pārbaude.<br />
25
<strong>Studiju</strong><br />
darba u zdevumi<br />
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
Stud. apl. Nr.<br />
p ēdējais cipars<br />
veids<br />
ekārtas<br />
I<br />
C entra augstums ( m m)<br />
v ai<br />
struktūra z=<br />
G alvenie p arametri<br />
S truktūra<br />
z= vai<br />
m aksimālais urbšanas<br />
d i ametrs ( m m)<br />
K vocients <br />
Nr.<br />
cipars<br />
Stud. apl.<br />
p riekšpēdējais<br />
D z inēja jauda ( k W )<br />
n m a x ( apgr/min )<br />
1 2 3 4 5 6 7 8<br />
0 100<br />
233 1 ,06<br />
0 3 , 2 1400<br />
1 125<br />
2223 1 ,12<br />
1 5 1250<br />
irpa<br />
2 160<br />
243 1 ,06<br />
2 7 1600<br />
V<br />
3 200<br />
2232 1 ,12<br />
3 10<br />
1800<br />
4<br />
250<br />
332 1 ,06<br />
4 14<br />
2000<br />
5 2322 25<br />
1 ,12<br />
5 3 , 2 1000<br />
6 323 35<br />
1 ,06<br />
6 5 1180<br />
rbjmašīna<br />
7 3222 40<br />
1 ,12<br />
7 7 1400<br />
8 423 50<br />
1 ,06<br />
8 10<br />
1500<br />
U<br />
9<br />
234 75<br />
1 ,12<br />
9 14<br />
1900<br />
26
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
Kontrolj<br />
autājumi<br />
1. Kāda<br />
ir datoru nozīme<br />
m ašīnbūves<br />
iekārtu automatizācijā<br />
2. K ā tiek formulēts nozīmīgāko ražošanas iekārtu jēdziens<br />
3. V ai ir iespējams noteikt raž<br />
ošanas iekārtu kvalitātes galveno kritēriju<br />
4. K ādai jābūt modernai ražošanas iekārtai<br />
5. No<br />
kādiem galvenajiem elementiem sastāv materiālu apstrādes<br />
m ašīnbūves<br />
i ekārta<br />
kā sistēma<br />
6. Kāda atšķirība ir starp instrumenta <strong>un</strong> sagataves relatīvām kustībām <strong>un</strong><br />
i zpildel<br />
ementu gājieniem<br />
7. Materiālu apstrādes<br />
8. Materiālu apstrādes<br />
9. K as ir pakāpjveida piedziņa<br />
m ašīnbūves<br />
iekārtas f<strong>un</strong>kcionālās grupas definīcija.<br />
m ašīnbūves<br />
iekārtas piedziņas f<strong>un</strong>kcijas.<br />
10. P akāpjveida piedziņas struktūras varianti.<br />
11. A r ko raksturojas saliktas strukt<br />
ūras piedziņa<br />
12. K as ir pārvadu grupa <strong>un</strong> tās raksturojums<br />
13. B ezpakāpju piedziņas veidi.<br />
14. H idropiedziņas kvalitatīvs raksturojums.<br />
15. K ādam nolūkam kalpo vārsti droseles <strong>un</strong> citi hidropiedziņas elementi<br />
16. Kādas<br />
ir materiālu apstrādes<br />
mašīnbūves<br />
iekārtu vadības sistēma<br />
s galvenās<br />
f <strong>un</strong>kcijas<br />
17. Kā<br />
raksturot<br />
spēkvadību<br />
, komandvadību<br />
<strong>un</strong><br />
datorvadību<br />
18. Materiālu apstrādes<br />
m ašīnbūves<br />
iekārtu automatizācijas koeficienta<br />
n oteikšana.<br />
27
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
19. K as ir automatizācija<br />
20. Ar<br />
ko atšķiras materiālu apstrādes<br />
m ašīnbūves<br />
iekārta ar d atorvadību<br />
no<br />
c itām<br />
m ašīnbūves<br />
iekārtām, kur tādas vadības nav<br />
21. Materiālu apstrādes<br />
m ašīnbūves<br />
iekārtu attīstības perspektīvas.<br />
28
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
P ielikums<br />
Mašīnbūves<br />
iekārtu iedalījums (piedziņa- v adība)<br />
ro<br />
kas<br />
me<br />
hāniska<br />
el<br />
ektriska<br />
hi<br />
drauliska<br />
pn<br />
eimatiska<br />
ci<br />
ta<br />
ar<br />
nerokas<br />
p iedziņu<br />
N P<br />
M ašīnbūves<br />
iekārtas<br />
a r rokas*<br />
p iedziņu<br />
R P<br />
a utomatizētas<br />
n eautomatizētas<br />
datorvadības<br />
D V<br />
n edatorvadības NV<br />
analogvadības<br />
A V<br />
k omandvadības<br />
K V<br />
signālvadības<br />
S V<br />
spēkvadības<br />
P V<br />
<br />
A pzīmējumi: pi<br />
emēram, DV<br />
r,m,<br />
e; RP; NPr,m,e,<br />
h; KV<br />
,m,e, h<br />
r ; SV<br />
r,e,<br />
h; PVr<br />
,m, e<br />
<br />
rokas m anuālā<br />
29
Mašīnbūves<br />
iekārtu<br />
piedziņa <strong>un</strong> vadība<br />
Literatūras<br />
sar<br />
aksts<br />
1. V.<br />
Zars,<br />
K. Pauliņš, E. Riekstiņš, H. Guļevskis, Ē. Prīmanis, G. Bahs.<br />
M etālgriešanas mašīnas. Mācību grāmata Latvijas augstskolu tehnisko<br />
s pecialitāšu studentiem metālgriešanas mašīnu <strong>kursa</strong> apgūšanai. - Rīga:<br />
Z vaigzne,<br />
1977. - 365<br />
lpp.<br />
2. Ē.<br />
Prīmanis. Mašīnbūves iekārtas.<br />
- Rīga:<br />
<strong>RTU</strong>, 2008. - 132<br />
lpp.<br />
3. V . Zars, E. Riekstiņš, K. Pauliņš, P. Lielpēters.<br />
Mašīnbūves iekārtas. Kursa<br />
projektēšana.<br />
- Rīga:<br />
Zvaigzne, 1991. - 326<br />
lpp.<br />
4. J . Avotiņš u.c. Mašīnbūves materiāli <strong>un</strong> to apstrāde.<br />
- Rīga: Zvaigzne, 1985.<br />
- 304<br />
lpp.<br />
5. S.<br />
Kalpakjian, S.R. Schmid. Manufacturing Engineering and Technology.<br />
-<br />
New Jersey: Prentice-<br />
Hall,<br />
2006. - 1295<br />
p.<br />
6. Weck M. Werkzeugmashinen Fertig<strong>un</strong>gssysteme 1. Maschinenarten <strong>un</strong>d<br />
Anwend<strong>un</strong>gsbereiche.<br />
- B erlin: Springer,<br />
1998. - 637<br />
S.<br />
30