Bacheloroppgave, forprosjekt - Elektra - Linjeforeningen for elektro ...
Bacheloroppgave, forprosjekt - Elektra - Linjeforeningen for elektro ...
Bacheloroppgave, forprosjekt - Elektra - Linjeforeningen for elektro ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
HØGSKOLEN I SØR-TRØNDELAG<br />
Avdeling <strong>for</strong> teknologi<br />
Program <strong>for</strong> <strong>elektro</strong>- og datateknikk<br />
7004 TRONDHEIM<br />
<strong>Bacheloroppgave</strong>, <strong><strong>for</strong>prosjekt</strong><br />
Oppgavens tittel:<br />
Utvikling av R/C helikopter (toveis 2.4GHz)<br />
Project tittel:<br />
RFCopter (RFC) http://hekta.org/~hpe1115<br />
Gruppedeltakere:<br />
Vegard Hella (VH) tlf: 91 81 40 40<br />
sjekk_it@hotmail.com<br />
Øyvind Andre Sandberg (ØAS) tlf: 95 90 58 16<br />
oeasand@gmail.com<br />
Gitt dato: 08.11.10<br />
Innlev.dato: 24.01.11<br />
Antall sider:<br />
19<br />
Veileder:<br />
Valdemar Finanger<br />
valdemar.finanger@hist.no<br />
tlf: 95 08 94 46<br />
Jesper Toftenes (JT) tlf: 99 53 05 63<br />
jesper.toftenes@gmail.com<br />
Christian Wilhelmsen (CW) tlf: 45 45 98 55<br />
christian.wilhelmsen87@gmail.com<br />
Studieretning/program:<br />
Elektronikk/Elektro- og datateknikk<br />
Oppdragsgiver:<br />
Nordic Semiconductor ASA<br />
Prosjektnummer:<br />
E1115<br />
Kontaktperson hos<br />
oppdragsgiver:<br />
Runar Skogstad Kjellhaug<br />
Runar.kjellhaug@nordicsemi.no<br />
tlf: 72 89 89 38<br />
Fritt tilgjengelig<br />
Tilgjengelig etter avtale med oppdragsgiver<br />
Rapporten frigitt etter
1 Sammendrag<br />
Denne rapporten er en innledning til hovedprosjektet vi skal gjennomføre i løpet av våren.<br />
Oppgaven vår er å lage et leketøyshelikopter som skal fjernstyres ved hjelp av 2.4GHz radioteknologi fra<br />
Nordic SemiConductor. Vi skal legge til funksjoner og muligheter som per i dag ikke er mulig å anskae til en<br />
lav pris, og samtidig holde kostnadene lavest mulig. Helikopteret skal kunne bli vist fram til nysgjerrige tilskuere<br />
<strong>for</strong> å vise hva Nordics brikker kan gjøre og å skape en bredere interesse <strong>for</strong> deres produkter.<br />
I denne rapporten har vi vi satt oss delmål, planlagt hvordan vi skal <strong>for</strong>dele arbeidsoppgavene og hvor lang<br />
tid vi kan sette av til hver enkelt oppgave.<br />
Forprosjektet dekker hovedprosjektets gang meget godt, men det vil være rom <strong>for</strong> endringer og <strong>for</strong>bedringer<br />
etterhvert som prosjektet går sin gang.<br />
Trondheim, 24.01.11<br />
Vegard Hella<br />
Øyvind A. Sandberg<br />
Jesper Toftenes<br />
Christian Wilhelmsen<br />
Runar S. Kjellhaug (Oppdragsgiver)<br />
Valdemar Finanger (Veileder)<br />
3
Innhold<br />
1 Sammendrag 3<br />
2 Innledning 6<br />
2.1 Bakgrunn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6<br />
2.2 Oppgaveteksten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6<br />
2.3 Rettigheter og oentliggjøring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6<br />
2.4 Denisjoner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
2.5 Rapportens oppbyggning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
3 Teknisk del 8<br />
3.1 Problemstilling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
3.2 Prosjektmål . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
3.2.1 Eektmål . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
3.2.2 Resultatmål . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
3.2.3 Prosessmål . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
3.3 Prosjektbeskrivelse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
3.4 Spesikasjoner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
3.4.1 Hovedegenskaper: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
3.4.2 Mulige tilleggsegenskaper: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9<br />
3.5 Sensorvurdering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10<br />
3.6 Helikoptervurdering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11<br />
3.7 Problemområder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11<br />
4 Arbeidspakker 12<br />
5 Prosjektorganisering 13<br />
5.1 Prosjektdeltagere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
5.2 Utstyr og ressurser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
5.3 Prosjektleveranser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
5.4 Tids- og kostnadsplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
5.5 Kvalitetssikring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
6 Vedlegg 15<br />
6.1 Blokkskjema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
6.2 Kostnadsdiagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
6.3 Timelister . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
6.4 Forventet tids<strong>for</strong>bruk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18<br />
6.5 Gantt skjema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19<br />
5
2 Innledning<br />
2.1 Bakgrunn<br />
Prosjektet er gitt av Nordic Semiconductor (NS), som holder til i Telenorbygget på Valentinlyst i Trondheim.<br />
NS er verdensledende innen short-range radiokommunikasjon (RC) ved 2.4GHz. NS ønsker å komme sterkere<br />
inn på RC-markedet, da spesielt med tanke på leketøy og andre RC-styrte hobbyenheter. De har allerede laget<br />
et design <strong>for</strong> radiostyrte biler, og ønsker å se på ut<strong>for</strong>dringer og muligheter ved å implementere sine radiobrikker<br />
i radiostyrte helikopter.<br />
På dagens marked nner vi ere 2.4GHz baserte helikoptre i mellomprisklassen, men de støtter kun en-veis<br />
kommunikasjon. Selv ikke de dyreste modellene med kraftige display har implementert to-veis kommunikasjon.<br />
2.2 Oppgaveteksten<br />
Utvikling av R/C helikopter med to-veis 2.4GHz radioteknologi fra Nordic SemiConductor ASA<br />
I ere tiår har fjernstyrte leketøy i lav/middelspris-segmentet vært dominert av enkle en-veis radioløsninger<br />
som opererer på 27MHz/35MHz/40MHz eller IR, og utviklingen på tidette området har vært meget begrenset.<br />
Med dagens fjernstyrte leketøy, hvis man skal operere ere enheter innen<strong>for</strong> et begrenset område, må hver enkelt<br />
aktør bestemme frekvenskanal ved fysisk å plugge inn et krystal med en bestemt frekvens <strong>for</strong> å på denne måten<br />
unngå at leketøyene interfererer med hverandre. I tillegg har hver aktør ofte bare 2-4 kontrollkanaler tilgjengelig.<br />
Med Nordic SemiConductor 2.4GHz to-veis radioteknologi nnes ikke slike begrensninger. Et tilnærmet ubegrenset<br />
antall aktørere kan operere i samme område og antall kontrollkanaler <strong>for</strong> hvert leketøy er mye høyere.<br />
I tillegg åpner to-veis kommunikasjon <strong>for</strong> muligheten <strong>for</strong> feedback fra leketøyet. Dette kan <strong>for</strong> eksempel være<br />
in<strong>for</strong>masjon om batteristatus, fart, høyde og generelle data fra innebygde sensorer.<br />
I denne oppgaven skal studentene lage et leketøyshelikopter som fjernstyres ved hjelp av 2.4GHz radioteknologi<br />
(nRF24LE1) fra Nordic SemiConductor. Det skal tas utgangspunkt i et eksisterende helikopter/fjernkontrollsett<br />
hvor man bytter ut hardwaren med en 2.4GHz radio/mikrokontroller-løsning fra Nordic SemiConductor.<br />
Oppgaven vil omfatte følgende:<br />
ˆ Utvikling av 2.4GHz radio hardware<br />
ˆ Utvikle rmware <strong>for</strong> helikopter og fjernkontroll som gir grunnleggende kontroll av helikopteret<br />
ˆ Implementering av <strong>for</strong> eksempel akselerometer, gyro, kompass og sensor(er) <strong>for</strong> høydemåling<br />
ˆ Implementering av reguleringssløyfe <strong>for</strong> ight assistant<br />
ˆ Mekanisk sammenstilling av helikopter og fjernkontroll<br />
ˆ Uttesting og dokumentasjon av designet<br />
Dette er en oppgave med muligheter <strong>for</strong> både lek og alvor. Her gis studentene muligheter til å utfolde seg i en<br />
verden med R/C-leker, design og utlegg av kretskort, utvikling av rmware og skru litt mekanikk.<br />
2.3 Rettigheter og oentliggjøring<br />
Rettighetene og det ferdige resultatet tilfaller Nordic Semiconductor ASA etter avtale. Alt av materiell kan<br />
gjøres oentlig tilgjengelig.<br />
6
2.4 Denisjoner<br />
NS Nordic Semiconductor<br />
RF Radiofrekvens<br />
RC Radiokontrollert<br />
DAC Digital til Analog Converter<br />
ADC Analog til Digital Converter<br />
µC Mikrokontroller<br />
SPI Serial Peripheral Interface Bus<br />
I2C Inter-Integrated Circuit Bus<br />
Pitch Forover/bakover<br />
Yaw Halerotors bevegelse<br />
Roll Sidelengs tilting<br />
Keil Utviklingsmiljø/Kompilator<br />
ESC Electronic Speed Controller<br />
RPM Rotasjoner Per Minutt<br />
GPS Global Positioning System<br />
2.5 Rapportens oppbyggning<br />
Forprosjektrapporten er delt opp i følgende hovedpunkter<br />
Teknisk del Inneholder all teknisk in<strong>for</strong>masjon <strong>for</strong> å få en <strong>for</strong>ståelse <strong>for</strong> prosjektet, og er delt opp i seksjonene<br />
prosjektmål, prosjektbeskrivelse, spesikasjoner, problemområder, sensorvurderinger og helikoptervurdering.<br />
Arbeidspakker<br />
deltakerne.<br />
Omhandler hvordan vi vil <strong>for</strong>dele prosjektet inn i ulike arbeidsområder på de <strong>for</strong>skjellige<br />
Prosjektorganisering Beskriver alle <strong>for</strong>hold som omhandler organiseringen av prosjektet, og er delt opp i<br />
seksjonene prosjektdeltakere, utstyr og ressurser, prosjektleveranser, tids- og kostnadsplan og kvalitetssikring.<br />
Vedlegg Materiell som ikke passer å legge inn i selve <strong><strong>for</strong>prosjekt</strong>et, består av 6.1 blokkskjema, 6.2 kostnadsdiagram,<br />
6.3 timelister, 6.4 tidsestimat og 6.5 Gantt-skjema.<br />
7
3 Teknisk del<br />
3.1 Problemstilling<br />
Det skal konstrueres et leketøyshelikopter basert på 2.4GHz trådløs kommunikasjon. Flere helikoptere på markedet<br />
bruker 2.4GHz teknologi, men det mangler toveis kommunikasjon. Det vil si at helikopteret samler in<strong>for</strong>masjon(fart,<br />
retning osv. ) og sender tilbake til datamaskin eller display på kontroller. Selv toppmodeller som<br />
koster over 10 000kr baserer sin verdi i børsteløse motorer og high-per<strong>for</strong>mance servo/motor styring frem<strong>for</strong><br />
sensorer og ight-assistant. Der<strong>for</strong> blir det viktig <strong>for</strong> oss å konstruere helikopteret med det utstyret og sensorer<br />
som ikke nnes på markedet enda. Samtidig som dette gjøres skal vi fokusere på at produktet blir billig og at<br />
det er strømbesparende.<br />
Dermed har vi følgende problemstilling: Å konstruere et helikopter som utnytter Nordic Semiconductor sin<br />
2.4GHz trådløse kommunikasjon og utnytte muligheten <strong>for</strong> toveis kommunikasjon ved å implementere sensorer<br />
og display/PC-interface <strong>for</strong> oppsamling av data.<br />
3.2 Prosjektmål<br />
3.2.1 Eektmål<br />
ˆ Lage et fungerende radiostyrt helikopter som styres med Nordic Semiconductors 2.4GHz NRF24LE1+<br />
mikrokontrollere.<br />
ˆ Minimalisert batteri<strong>for</strong>bruk.<br />
ˆ Lavest mulig pris.<br />
ˆ Morsomt og enkelt å bruke.<br />
3.2.2 Resultatmål<br />
ˆ Opprette kommunikasjon til/fra helikopteret<br />
Styre helikopteret via kontrolleren ved å endre servo og motorverdier.<br />
Lage utlegg <strong>for</strong> krets på helikopteret og til kontrolleren.<br />
ˆ Batteristatus og andre sensorer til transmitter.<br />
Sende gyroskop-, akselerometer- og kompass-avlesninger tilbake til kontroller.<br />
Display eller PC-program <strong>for</strong> avlesning og logging av sensordata in-ight.<br />
ˆ Flight Assistant.<br />
Et automatisert system <strong>for</strong> å gjøre yvningen enklere.<br />
Bruke høydemåler, approksimasjonssensor, gyroskop og akselerometer automatisk i kontrolleren.<br />
ˆ Ca 450 arbeidstimer per person.<br />
ˆ Prosjektet er avsluttet innen 5.Mai 2011.<br />
3.2.3 Prosessmål<br />
Vi <strong>for</strong>venter av oss selv å få et ferdig prototyp av helikopteret yvende. Det må kunne utføre de egenskapene<br />
helikopteret hadde før vi startet arbeidet på det. I tillegg ønsker vi selv å få på så mye av sensorer og tilleggsutstyr<br />
som mulig <strong>for</strong> å ytterligere øke underholdningsverdien og yveegenskapene til helikopteret. Personlig utbytte av<br />
prosjektet vil være faglige kunnskaper, praktiske erfaringer av prosjektarbeid, en god karakter og selvfølgelig at<br />
vi har det gøy under prosjektet.<br />
8
3.3 Prosjektbeskrivelse<br />
I oppstartsfasen har vi allerede møtt oppdragsgiver, fått litt kursing i nRF GO, og opprettet en hjemmeside.<br />
Under <strong><strong>for</strong>prosjekt</strong>et skal vi evaluere ulike helikoptertyper. I hovedsak eksisterer det to hovedtyper, koaksielle<br />
rotorblader eller halerotor. Vi skal vurdere aktuelle sensorer feks. gyro, akselerometer, høydemåler og approksimasjonssensor.<br />
Vi må også sette opp fullstendig kontaktin<strong>for</strong>masjon, Ganttskjema og et kostnadsskjema. Vi<br />
har også <strong>for</strong>delt de ulike enhetene vi skal gjennomføre etter prioritering.<br />
Først i hovedprosjektet må vi konstruere den grunnleggende styringen av helikopteret. Det vil si input<br />
fra styrestikkene, trådløs sending til helikopteret og styring av servoer og ESCer. Her bruker vi servoene og<br />
joystickene som følger med helikopteret hvis det lar seg gjøre. Her tar vi også <strong>for</strong> oss paring mellom fjernkontroll<br />
og helikopter.<br />
I annen runde skal vi lage to batteristatusindikatorer, en <strong>for</strong> helikopteret og en <strong>for</strong> fjernkontrollen. For<br />
å vise statusene bruker vi to LED-barer med en oppløsning på 4-5 LEDs, montert på fjernkontrollen. Dette<br />
er det første steget der vi viser toveiskommunikasjon og følger opp tråden rundt lavt strøm<strong>for</strong>bruk. Parallelt<br />
begynner vi på implementering av gyro og akselerometer. Her kan vi allerede begynne å tenke ight-assistant<br />
og motvirke spinn, ekstrem tilt og høydedropp via input fra de to sensorene.<br />
Deretter har vi tenkt å implementere høydesensor og et kompass sammen med et display. Vi har også tenkt<br />
på approksimasjonssensing, noe lignende en ryggesensor til bil. Dette via IR-sensorer, enten en som spinner i<br />
rotoren eller ere fastmonterte IR-sensorer. I førsteomgang lager vi kun en indikasjon på om noe er i nærheten<br />
av helikopteret, deretter en indikasjon på retningen. Dette kan indikeres vha. en beep-speaker eller displayet.<br />
Skulle vi implementere en liten høytaler kan denne også brukes til å signalisere lav batteristatus m.m.<br />
Mot slutten av prosjektet ser vi på USB-donglen som følger nRF-brikkesettet, <strong>for</strong> deretter å lage et brukergrensesnitt<br />
som viser de aktuelle målingene, logging og grang.<br />
Hvis vi får tid på slutten har vi tankeeksperimentert med ideer om laser-tag, rumble-pack, kamera og<br />
GPS. Laser-tag enten med laser på bakken og mottaker på y eller omvendt, og indikasjon ved rumblepack i<br />
fjernkontrollen. Siden vi har toveis kommunikasjon kan vi også sende stillbilder eller lavoppløst video til en PC.<br />
3.4 Spesikasjoner<br />
3.4.1 Hovedegenskaper:<br />
ˆ Low-power toveis 2.4GHz trådløs kommunikasjon<br />
ˆ Middels prisklasse<br />
ˆ Fjernkontroll med display<br />
ˆ Paring av sender/mottaker<br />
ˆ Tilnærmet ubegrenset antall aktører i samme område.<br />
ˆ Rekkevidde 50m<br />
ˆ Flight-assistant (stabilitetskontroller)<br />
ˆ 3-akse gyroskop<br />
ˆ 3-akse akselerometer<br />
ˆ Kompass<br />
ˆ Approksimasjonssensor<br />
ˆ Høydemåler (Barometer eller Ultrasonic Range Finder)<br />
3.4.2 Mulige tilleggsegenskaper:<br />
ˆ GPS<br />
ˆ Laser-tag (Dogght)<br />
ˆ Kamera (Foto eller video)<br />
9
3.5 Sensorvurdering<br />
Når det kommer til sensorer på helikopteret begynner det <strong>for</strong>t å bli snakk om mye tilleggsutstyr. Det er vanskelig<br />
å sette prioriteringer på de <strong>for</strong>skjellige sensorene, da helikopteret kan holde seg stabilt kun ved hjelp av gyro.<br />
SparkFun har en ott guide til akselerometre og gyroskop, det er tatt utgangspunkt i. 1<br />
Akselerometer kan plasseres i hver av retningene (x,y,z) og registrerer endringer. Kan også hjelpe til <strong>for</strong> å<br />
holde helikopteret i riktig høyde i lufta. Akselerometre nnes i ere <strong>for</strong>mater; Scale-Range, Interface og<br />
antall akser målt.<br />
-Scale-range beskriver rekkevidden og maksimalverdi det kan måle. Sparkfun har alt fra ±1G til ±250G.<br />
Helikopteret vil nok ikke trenge verdier større enn 2-3G maksimalt, tror vi. Flere akselerometre kan justere<br />
rekkevidde etter krav vs. oppløsning.<br />
-Interface går ut på output fra sensoren. Letteste å bruke er analog spenning proposjonal med målt verdi.<br />
Akselerometeret gir ut analog verdi som må via ADC på kontrolleren <strong>for</strong> sensor input. Vil helst slippe å<br />
måtte bruke en ADC-port på kontrolleren, og ønsker selv å bruke digital interface på vanlig I/O port.<br />
-Antall akser er selv<strong>for</strong>klarende. 1, 2 eller 3 akser <strong>for</strong> målingen. X- og y-retning vil gi oss bevegelse i<br />
retningene, og z-retning kan ha free-fall detection og akselerasjon opp/ned. Det er også mulig å plassere<br />
en i halen <strong>for</strong> å måle rotasjon rundt egen akse.<br />
SparkFun anbefaler BMA-1803-akse digitalt (4-Wire SPI eller I2C) med variabel oppløsning m.m. <strong>for</strong> ca<br />
$30.<br />
Gyroskop måler vinkelhastigheter, altså hvor raskt det spinner rundt sin akse. I motsetning til akselerometer<br />
blir den ikke påvirket av tyngdekraften. Vanligvis er signalet enten RPM eller Grader/Sekund. Da det<br />
er fullt mulig å måle rotasjon i alle akser(x,y,z); Roll, Pitch og Yaw, selv om 3-akse enda ikke er veldig<br />
vanlig. Output er mulig å få i digitalt eller analogt <strong>for</strong>mat. SparkFun anbefaler IGT-3200 3-akse gyroskop<br />
med I2C til $50.<br />
Høydemåler vil ansees som lavere prioritering. Dette er ikke nødvendig <strong>for</strong> å y helikopteret, men vil kunne gi<br />
nyttig in<strong>for</strong>masjon om helikopteret. Her nnes det ere teknologier, og alle har sine <strong>for</strong>deler og ulemper.<br />
Det nnes barometriske trykkmålere med presisjon opptil 9cm trykk;SCP-1000 D01, men disse kan få <strong>for</strong><br />
svak oppløsning og må kalibreres før hver yvning. SparkFun har en rekke UltraSonic sensorer <strong>for</strong> bruk, <strong>for</strong><br />
ca $30 som er små og enkle å implementere;Ultrasonic Range Finder, men disse har riktig nok kun 6-7 meter<br />
rekkevidde. En tredje mulighet er IR-måling som har samme teknologi som approksimasjonssensoren, men<br />
her er det også uvisst om rekkevidden. Mulig en kraftig laser og presis fotodiode kan gjøre jobben, men<br />
dette må vi gjøre mer <strong>for</strong>skning på fra vår side. Det kan godt hende at trykkmåler vil gi det beste<br />
resultatet, selv med 9cm oppløsning.<br />
GPS er strømkrevende tillegg, som vil få laveste prioritet. Krever datatrakk fra helikopteret, og vil også<br />
trenge kartprogram på maskin <strong>for</strong> plotting av reise. Dette vil være en stor jobb og kreve mye tid av<br />
gruppa. Siden helikopteret i hovedsak skal være lite og low-power blir GPS et tillegg som må brukes lite<br />
under ight. Ved suksessfull implementering av GPS kan helikopteret også lære å y til koordinater på<br />
egenhånd og Autopilot.<br />
Kompass er en liten komponent, koster ca $30 og kommuniserer oftest via I2C. HMC6352 har 0.5 grad oppløsning,<br />
trenger 2.7 -> 5.2V spenning og trekker 1mA ved 3V. Kompass kan, ved ferdig PC-interface,<br />
enkelt implementeres i kretsen og vise retningen i to akser på datamaskin.<br />
Termometer kan være praktisk å plassere ved kretskort og motorer som er kjent <strong>for</strong> å bli varme. Ved intensiv<br />
yvning kan disse bli veldig varme, og en infokapsel om motortemperatur kan advare pilot om å måtte y<br />
<strong>for</strong>siktigere. DS18B20<br />
Approksimasjonssensor blir praktisk sett som en ryggesensor i bil. IR-diode og fotosensitiv diode måler<br />
avstand og piping-/lysing-/rumblepack-indikasjon ved nær måling. En teknologi vi har observert brukte<br />
en diode fastmontert på rotorblad og ved rotasjoner fungerte som en radar. Helikopteret dette var på<br />
holdt seg da unna vegger og personer automatisk.<br />
1 Alle sensorer fra Sparkfun kommer på breakout board med punkter <strong>for</strong> lodding eller header-pins. Sensorer er betydelig mindre<br />
uten kretskortet det kommer på. Accelerometer and Gyro Buying Guide - http://www.sparkfun.com/tutorials/167<br />
10
3.6 Helikoptervurdering<br />
Kontraroterende rotor vs. halerotor Ved første inntrykk virker det som at det er lettere å justere og<br />
kalibrere et kontraroterende helikopter (KRH). Erfaringer innad i gruppen viser at halerotorhelikopter (HRH)<br />
krever mye arbeid <strong>for</strong> å bli njustert, og likevel ganske vanskelig å holde stabilt i luften. Dette er selvfølgelig<br />
kun førstegangsproblemer, ved nytt helikopter, og skal ikke være noe problem så <strong>for</strong>t helikopteret er justert og<br />
kalibrert korrekt.<br />
Ved respons virker det som et KRH svarer tregere og muligens også mindre ved justeringer fra kontroller/joystick.<br />
HRH har mye raskerere respons, noe som gjør det mer sensitivt til korrekte justeringer. Dersom<br />
en gir <strong>for</strong> mye input til yvemaskinen er du raskt ute av kurs, og det blir vanskelig å få helikopteret tilbake<br />
i kontroll. Det kontraroterende helikopteret er mindre sensitivt. Dette gir det en viss treghet, men også en<br />
stabilitet. Det skal mer input til <strong>for</strong> å utføre de samme bevegelsene.<br />
Alt i alt virker kontraroterende helikopter til å være lettest å starte med. Det må gjøres større feil bak<br />
spakene <strong>for</strong> å få helikopteret ut av kontroll. Halerotorhelikopteret er såpass sensitivt at en må konstant passe<br />
på posisjon og være veldig n på input.<br />
3.7 Problemområder<br />
ˆ Oppnå stabile ygninger<br />
ˆ Uegnete sensorer<br />
ˆ EMC<br />
ˆ Ødelagte komponenter ved krasjlandinger<br />
ˆ Batterikapasitet<br />
ˆ Sykdom og u<strong>for</strong>utsette hendelser<br />
Det blir viktig å ha et godt supplement med reservedeler og ere batterier. Vi burde teste ere ulike sensorer.<br />
EMC relaterte problemer kan oppstå, feks mellom <strong>elektro</strong>motor og sensor. Batterikapasitet kan medføre at<br />
enheter må droppes, feks GSP. Den antatt største ut<strong>for</strong>dringen blir å lage ight-assistant, da dette er antatt<br />
å være en spesielt tidkrevende oppgave. Noen rent programeringstekniske problemer må vi også ta høyde <strong>for</strong>.<br />
Heldigvis har vi gode ressurser blandt lærere på HiST og ansatte ved Nordic Semiconductor, både når det<br />
gjelder reguleringsteknikk, programmering og nRF24LE1 brikkesettet.<br />
11
4 Arbeidspakker<br />
Under følger en <strong>for</strong>deling av oppgavene, et estimat av arbeidsmengden og prioriteringer. Det står også oppgitt<br />
en ansvarlig person <strong>for</strong> de ulike gjøremålene. Totalt har vi ca. 2000 arbeidstimer å investere, <strong>for</strong>delt på re<br />
personer.<br />
Hjemmeside<br />
Tids<strong>for</strong>bruk: 6 timer<br />
ˆ Oppretting av internetthjemmeside <strong>for</strong> prosjektet.<br />
Ansvarlig CW<br />
Forprosjekt<br />
Tids<strong>for</strong>bruk: 150 timer<br />
ˆ Evaluere ulike helikoptertyper, henholdsvis betrakte <strong>for</strong>deler og ulemper ved koaksial- og halerotorteknologi<br />
Ansvarlig: CW<br />
ˆ Vurdere ulike funksjoner, display og sensorer, blant annet gyro og akselerometer.<br />
Ansvarlig: JT<br />
ˆ Prosjektorganisering og kontaktin<strong>for</strong>masjon, Ganttskjema<br />
Ansvarlig: ØAS<br />
Utvikling og simulering<br />
Tids<strong>for</strong>bruk: 900 timer<br />
ˆ Programmere rmware <strong>for</strong> grunnleggende styring (1. prioritet)<br />
Ansvarlig: Alle<br />
ˆ Programmere rmware til sensorer, batteristatus etc. (2. prioritet)<br />
Ansvarlig: ØAS<br />
ˆ Utvikle grensesnitt til pc med målinger (2. prioritering)<br />
Ansvarlig: JT<br />
ˆ Display på fjernkontrollen med sensormålinger (3. prioritet)<br />
ˆ Simulere og programmere "ight-assistant" (3. prioritet)<br />
Ansvarlig: CW<br />
ˆ Konstruere pcb-utlegg til fjernkontroll og helikopter pluss motasje.<br />
Ansvarlig: VH<br />
Testing og justering<br />
Tids<strong>for</strong>bruk: 500 timer<br />
ˆ Testyvning og registrere måledata<br />
Ansvarlig: CW<br />
ˆ Rekongurere rmware, eventuelle endringer på kretskortene.<br />
Ansvarlig: VH<br />
Prosjektrapport<br />
Tids<strong>for</strong>bruk 400 timer<br />
ˆ Kostnadsoversikt, loggføringer, dokumentasjon.<br />
Ansvarlig: ØAS<br />
12
5 Prosjektorganisering<br />
Vi har valgt å <strong>for</strong>dele lederstillingen med en rullerende ordning. Byttet skjer ved hvert 14-dagersmøte i alfabetisk<br />
rekkefølge. Dermed vil første leder være Vegard Hella frem til neste møte.<br />
5.1 Prosjektdeltagere<br />
Vegard Hella<br />
Adresse: Elveveien 23, 7031 Trondheim<br />
Født: 07.04.1989<br />
Vegard jobbet sommeren 2009 og 2010 på Tomra Produksjoner A/S. Der monterte han kamerahus<br />
og hovedkort i panteautomater, testet disse og reparerte ødelagte moduler.<br />
Innen utdanning har han tatt realfag ved Asker Videregående Skole, 3MX, 3FY og 3KJ. Nå går<br />
han siste året på <strong>elektro</strong>nikklinjen ved Høgskolen i Sør-Trøndelag med AutoCAD og Matte 4 som<br />
valgfag.<br />
Ved siden av skolen skrur han <strong>elektro</strong>nikk som bla. <strong>for</strong>sterkere og mikrofoner, og i annen rekke ser<br />
han seg selv som hobbylydteknikker og musikkprodusent.<br />
Øyvind A. Sandberg<br />
Adresse: Lademoens Kirkealle 11C, 7042 Trondheim<br />
Født: 08.03.1984<br />
Øyvind er født og oppvokst i Oslo. Her gikk han GK Elektro og VK1 IKT-driftsoperatør. Lærlingperioden<br />
ble gjort i Oslo Kommune, Vann- og avløpsetaten som IT-support/administrator.<br />
Etter endt militærtjeneste i Bardufoss, yttet han til Trondheim. I Trondheim tok han først generell<br />
studiekompetanse og realfag ved Sonans privat gymnas. Samtidig har han giftet seg og kk i 2008<br />
en liten jente, venter nå barn nr 2. Per dags dato går han bachelor i <strong>elektro</strong>nikk ved Høgskolen i<br />
Sør Trøndelag og jobber deltid i Securitas AS.<br />
Jesper Toftenes<br />
Adresse: Elveveien 23, 7031 Trondheim<br />
Født: 03.08.1989<br />
Jesper gikk ved Asker Videregående Skole med 3MX, 3FY, In<strong>for</strong>masjonsbehandling og Systemkonstruksjon<br />
i 2008. Er nå på sitt 3. år ved Høgskolen i Sør-Trøndelag på Elektronikk med valgfag i<br />
Matematikk 4, Autocad og Fiberoptisk Transmisjon.<br />
Har tidligere konstruert byggeregnskapsdatabase i Filemaker Pro <strong>for</strong> Sohlberg & Toftenes as. Har<br />
på fritiden programmert C og VisualBasic. Har en interesse <strong>for</strong> spill og hi. Har bygd sitt eget<br />
høytalersett.<br />
Christian Wilhelmsen<br />
Adresse: Fotveita 5, 7012 Trondheim<br />
Født: 07.03.1987<br />
Christian er 23 år gammel, er født og oppvokst i Trondheim og har utdannet seg innen sterkstrøm<br />
<strong>elektro</strong> på Brundalen og Ladejarlen VGS. Han gikk deretter på <strong>for</strong>kurs på HiST og er nå på sitt<br />
tredje år på <strong>elektro</strong>- og datateknikk.<br />
Christian har arbeiserfaring som produksjonsassistent ved Alphatron AS der arbeidsoppgavene besto<br />
i å ferdigstille kretskort, montering av kretser i kabinett og generellt loddearbeid. Nå jobber han ved<br />
utviklingsavdelingen på Autronica Fire&Security der han tegner kretsskjema, setter opp testrigger<br />
<strong>for</strong> test av rmware til brannalarmsentraler og lodder testkort.<br />
På fritiden går det i diverse datateknikk, hobby<strong>elektro</strong>nikk og noe spill.<br />
13
5.2 Utstyr og ressurser<br />
Liste over utstyr som vi har behov <strong>for</strong> til prosjektet. Omfatter ikke måleinstrumenter, strøm<strong>for</strong>syninger og<br />
småmatriell. Til utvikling har vi lånt 3 nRF Go StarterKit fra <strong>Elektra</strong> (linje<strong>for</strong>eningen), mulig vi må høre med<br />
Nordic Semiconductor om ere til egen disposisjon.<br />
ˆ 4 stk PC<br />
ˆ 3 nRF Go Starter Kit<br />
ˆ R/C helikopter<br />
ˆ Software: Gazelle / Keil<br />
5.3 Prosjektleveranser<br />
Rapporter som skal komme i løpet av prosjektet:<br />
ˆ Forprosjektrapport (denne rapporten)<br />
ˆ 2-ukers rapporter, hver 2. uke<br />
ˆ Prototype<br />
ˆ Prosjektrapport<br />
5.4 Tids- og kostnadsplan<br />
Se vedlegg: 6.2 kostnadsdiagram og 6.3 tidsplan.<br />
5.5 Kvalitetssikring<br />
Dokumentasjon er viktig når man skal sikre kvaliteten i et prosjekt, noe gruppen vil gjøre ved hjelp av en<br />
journal. Fungerende prosjektleder vil følge opp tidsfrister og møteinnkallelser og referat. Prosjektgruppen vil<br />
ha møter hver uke hvor planlagt og faktisk fremgang blir sammenlignet.<br />
Statusrapportering: Studentene skal rapportere hva som har blitt gjort og hvordan de ligger ann i <strong>for</strong>hold<br />
til fremdriftsplanen før 14-dagersmøte(ne) og timer vil føres i S-diagram. Ved hvert 14-dagersmøte vil gruppen<br />
in<strong>for</strong>mere oppdragsgiver og eventuelt veileder om tingenes tilstand.<br />
Hver gruppedeltaker er ansvarlig <strong>for</strong> å føre enhver fremgang og dokumentere sitt arbeid, dette vil være leder<br />
sitt ansvar og påse at deltaker følger. Gruppens deltagere vil være ansvarlig <strong>for</strong> hver sine deldokumenter <strong>for</strong> å<br />
hindre overskriving, og enhver endring må gjøres av ansvarlig.<br />
Backup av nettsider og dokumenter skal hindre tapt in<strong>for</strong>masjon.<br />
14
6 Vedlegg<br />
6.1 Blokkskjema<br />
Rotormotor 1<br />
(Opp og ned)<br />
Rotormotor 2<br />
(Spinn egenakse)<br />
Servo 1<br />
(Venstre og høyre, tilt)<br />
Servo 2<br />
(Fram- og bakover, tilt)<br />
ESC 1 ESC 2<br />
PWM/pulstimer<br />
Kompass<br />
Approksimasjonssensor<br />
Akselerometer<br />
(3 akser)<br />
I2C/SPI<br />
Høydesensor<br />
Gyro<br />
(3 akser)<br />
Hovedkontroller helikopter<br />
(nRF24LE1)<br />
Batteristatusindikator<br />
Helikopter<br />
Fjernkontroll<br />
Trådløs (2,4GHz)<br />
Datamaskin<br />
Styrestikke 1<br />
(opp, ned, spinn)<br />
Hovedkontroller fjernkontroll<br />
(nRF24LE1)<br />
Trådløs (2.4GHz)<br />
USB dongle<br />
Styrestikke 2<br />
(tilt)<br />
Brukergrensesnitt<br />
”Beep-Speaker”<br />
Display<br />
Batteristatusindikator<br />
RFCopter<br />
E1115<br />
14.01.11<br />
Nordic Semiconductor ASA<br />
Forklaring:<br />
1. Prioritet<br />
2. Prioritet<br />
3. Prioritet<br />
Styresignal<br />
Periferesignaler<br />
15
Kroner<br />
6.2 Kostnadsdiagram<br />
9000<br />
Kostnadsdiagram (akkumulert)<br />
8000<br />
7000<br />
6000<br />
5000<br />
4000<br />
3000<br />
2000<br />
1000<br />
0<br />
Dato<br />
Dato Utgifter [kr] Hva Pris<br />
14.jan 0<br />
01.feb 2300 2 stk Helikopter, diverse sensorer 2300<br />
14.feb 3000 reservedeler helikopter 700<br />
01.mar 3150 div IC 150<br />
14.mar 3350 div komponenter 200<br />
01.apr 6350 PCB - testkort 3000<br />
14.apr 6350<br />
01.mai 7850 PCB - sluttprodukt 1500<br />
16
6.3 Timelister<br />
Resource Usage as of Wed 19.01.11<br />
<strong><strong>for</strong>prosjekt</strong>cal<br />
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19<br />
Total<br />
VH 4,8 hrs 8 hrs 20,8 hrs 48 hrs 24 hrs 8 hrs 88 hrs 48 hrs 8 hrs 8 hrs 32 hrs 48 hrs 48 hrs 32 hrs 8 hrs 8 hrs 6,4 hrs 448 hrs<br />
Forprosjekt 4,8 hrs 8 hrs 4,8 hrs 17,6 hrs<br />
Lære å programmere nRF GO 16 hrs 40 hrs 16 hrs 72 hrs<br />
Electronic Speed Control 40 hrs 40 hrs<br />
Aproksimasjonssensor 24 hrs 24 hrs 48 hrs<br />
Utlegg 16 hrs 24 hrs 40 hrs<br />
Joystick 40 hrs 40 hrs 80 hrs<br />
Utlegg 16 hrs 24 hrs 40 hrs<br />
Rapportskriving 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 6,4 hrs 110,4 hrs<br />
ØAS 4,8 hrs 8 hrs 36,8 hrs 72 hrs 24 hrs 8 hrs 92,4 hrs 18,4 hrs 63,4 hrs 84,4 hrs 74,4 hrs 9,4 hrs 496 hrs<br />
Forprosjekt 4,8 hrs 8 hrs 4,8 hrs 17,6 hrs<br />
Lære å programmere nRF GO 16 hrs 40 hrs 16 hrs 72 hrs<br />
Innkjøp 16 hrs 24 hrs 40 hrs<br />
Batteristatus 77 hrs 3 hrs 80 hrs<br />
Gyroskop 48 hrs 48 hrs<br />
GPS 48 hrs 48 hrs<br />
Batteristatus 69 hrs 11 hrs 80 hrs<br />
Rapportskriving 8 hrs 8 hrs 8 hrs 15,4 hrs 15,4 hrs 15,4 hrs 15,4 hrs 15,4 hrs 9,4 hrs 110,4 hrs<br />
JT 4,8 hrs 8 hrs 20,8 hrs 48 hrs 24 hrs 8 hrs 48 hrs 8 hrs 48 hrs 48 hrs 48 hrs 48 hrs 48 hrs 16 hrs 8 hrs 8 hrs 6,4 hrs 448 hrs<br />
Forprosjekt 4,8 hrs 8 hrs 4,8 hrs 17,6 hrs<br />
Lære å programmere nRF GO 16 hrs 40 hrs 16 hrs 72 hrs<br />
Servostyring 40 hrs 40 hrs<br />
Aksellerometer 40 hrs 8 hrs 48 hrs<br />
Høydemåler 32 hrs 16 hrs 48 hrs<br />
USB Dongle 24 hrs 24 hrs<br />
Brukergrensesnitt 40 hrs 40 hrs 8 hrs 88 hrs<br />
Rapportskriving 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 6,4 hrs 110,4 hrs<br />
CW 4,8 hrs 8 hrs 20,8 hrs 48 hrs 24 hrs 8 hrs 48 hrs 48 hrs 48 hrs 80 hrs 97,6 hrs 72 hrs 70,4 hrs 8 hrs 8 hrs 8 hrs 6,4 hrs 608 hrs<br />
Forprosjekt 4,8 hrs 8 hrs 4,8 hrs 17,6 hrs<br />
Lære å programmere nRF GO 16 hrs 40 hrs 16 hrs 72 hrs<br />
Kompass 40 hrs 8 hrs 48 hrs<br />
Temperatursensor 32 hrs 16 hrs 48 hrs<br />
Joystick 40 hrs 40 hrs 80 hrs<br />
Display 33,6 hrs 56 hrs 22,4 hrs 112 hrs<br />
Flight assistant 40 hrs 40 hrs<br />
Rapportskriving 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 8 hrs 6,4 hrs 110,4 hrs<br />
Alle 1<br />
Total 19,2 hrs 32 hrs 99,2 hrs 216 hrs 96 hrs 32 hrs 276,4 hrs 122,4 hrs 167,4 hrs 220,4 hrs 252 hrs 177,4 hrs 166,4 hrs 56 hrs 24 hrs 24 hrs 19,2 hrs 2 000 hrs<br />
Page 1<br />
17
6.4 Forventet tids<strong>for</strong>bruk<br />
2000<br />
1800<br />
1600<br />
1400<br />
1200<br />
HPE1115 Forventet tids<strong>for</strong>bruk<br />
Timer<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20<br />
Uke<br />
18
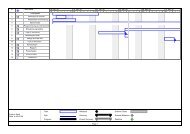
6.5 Gantt skjema<br />
2 4 6 8 10 12 14 16 18<br />
S W S T M F T S W S T M F T S W S T M F T S W S T M F T S W S T<br />
CW[20%];JT[20%];VH[20%];ØAS[20%]<br />
CW;JT;VH;ØAS<br />
ID Task<br />
Mode<br />
Task Name Duration Start Finish<br />
1 Forprosjekt 11 days Wed 12.01.11 Wed 26.01.11<br />
2 Hovedprosjekt 72 days Thu 27.01.11 Fri 06.05.11<br />
3 Lære å programmere nRF GO 9 days Thu 27.01.11 Tue 08.02.11<br />
4 Innkjøp 5 days Thu 27.01.11 Wed 02.02.11<br />
5 Demontering 3 days Thu 03.02.11 Mon 07.02.11<br />
6 Helikopter 30 days Mon 21.02.11 Fri 01.04.11<br />
7 Servostyring 5 days Mon 21.02.11 Fri 25.02.11<br />
8 Electronic Speed Control 5 days Mon 21.02.11 Fri 25.02.11<br />
9 Helikopter kan fly 0 days Mon 28.02.11 Mon 28.02.11<br />
10 Batteristatus 10 days Mon 21.02.11 Mon 28.02.11<br />
11 Studieuke 5 days Mon 28.02.11 Fri 04.03.11<br />
12 Gyroskop 6 days Mon 07.03.11 Mon 14.03.11<br />
13 Aksellerometer 6 days Mon 07.03.11 Mon 14.03.11<br />
14 Kompass 6 days Mon 07.03.11 Mon 14.03.11<br />
15 Sensorkrav ferdig 0 days Tue 15.03.11 Tue 15.03.11<br />
16 Flight assistant 10 days Tue 15.03.11 Mon 28.03.11<br />
17 Høydemåler 6 days Tue 15.03.11 Tue 22.03.11<br />
18 Aproksimasjonssensor 6 days Wed 23.03.11 Wed 30.03.11<br />
19 GPS 6 days Tue 22.03.11 Tue 29.03.11<br />
20 Temperatursensor 6 days Tue 15.03.11 Tue 22.03.11<br />
21 Utlegg 5 days Thu 31.03.11 Wed 06.04.11<br />
22 Laser-tag 3 days Thu 14.04.11 Mon 18.04.11<br />
23 Buffer 7 days Tue 29.03.11 Wed 06.04.11<br />
24 Fjernkontroll 30 days Mon 21.02.11 Fri 01.04.11<br />
25 RFID parring 1 day Mon 21.02.11 Mon 21.02.11<br />
26 Joystick 10 days Mon 21.02.11 Fri 04.03.11<br />
27 Batteristatus 10 days Mon 14.03.11 Mon 21.03.11<br />
28 Utlegg 5 days Thu 07.04.11 Wed 13.04.11<br />
29 Display 10 days Wed 23.03.11 Tue 05.04.11<br />
30 Simulering 5 days Mon 04.04.11 Fri 08.04.11<br />
31 Flight assistant 5 days Mon 04.04.11 Fri 08.04.11<br />
32 PC 14 days Wed 23.03.11 Mon 11.04.11<br />
33 USB Dongle 3 days Wed 23.03.11 Fri 25.03.11<br />
34 Brukergrensesnitt 11 days Mon 28.03.11 Mon 11.04.11<br />
35 Rapportskriving 283,13 days Mon 31.01.11 Thu 05.05.11<br />
Task<br />
ØAS<br />
JT<br />
VH<br />
28.02<br />
ØAS<br />
Alle[1]<br />
ØAS<br />
JT<br />
CW<br />
15.03<br />
CW<br />
JT<br />
VH<br />
ØAS<br />
CW<br />
VH<br />
CW;VH<br />
ØAS<br />
VH<br />
CW[140%]<br />
CW<br />
JT<br />
JT<br />
CW[20%];JT[20%];VH[20%];ØAS[20%]<br />
Finish-only<br />
Manual Task<br />
Deadline<br />
External Tasks<br />
Project: Forprosjekt E1115<br />
Date: Wed 19.01.11<br />
Split<br />
Milestone<br />
Summary<br />
External Milestone<br />
Inactive Task<br />
Inactive Milestone<br />
Project Summary<br />
Inactive Summary<br />
Duration-only<br />
Progress<br />
Manual Summary Rollup<br />
Manual Summary<br />
Start-only<br />
Page 1<br />
19