Detecção de Drusas em imagens de retinografia - deetc
Detecção de Drusas em imagens de retinografia - deetc
Detecção de Drusas em imagens de retinografia - deetc

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Introdução<br />
<strong>Detecção</strong> <strong>de</strong> <strong>Drusas</strong> <strong>em</strong> <strong>imagens</strong> <strong>de</strong> <strong>retinografia</strong><br />
José Manuel Fonseca André Damas Mora Pedro Manuel Vieira<br />
jmf@uninova.pt atm@uninova.pt pmv@fct.unl.pt<br />
UNINOVA, FCT-UNL<br />
Campus da Faculda<strong>de</strong> <strong>de</strong> Ciências e Tecnologia/UNL, Quinta da Torre, 2829-516 Caparica<br />
PORTUGAL<br />
Telefone: 21 294 83 80, Fax: 21 294 12 53<br />
<strong>Drusas</strong> são indicadores <strong>de</strong> <strong>de</strong>generação macular, uma patologia que se caracteriza por acumulações<br />
<strong>de</strong> materiais extra celulares sob a retina. O estudo automático da evolução quantitativa <strong>de</strong> manchas<br />
<strong>de</strong> <strong>Drusas</strong> ao longo <strong>de</strong> um tratamento médico constitui uma ferramenta <strong>de</strong> gran<strong>de</strong> utilida<strong>de</strong> para<br />
médicos oftalmologistas os quais, até ao momento, efectuam a sua análise <strong>de</strong> forma manual<br />
baseando-se <strong>em</strong> aspectos qualitativos.<br />
Neste artigo é apresentada uma metodologia <strong>de</strong> <strong>de</strong>tecção e quantificação automática <strong>de</strong> manchas <strong>de</strong><br />
<strong>Drusas</strong> <strong>em</strong> <strong>imagens</strong> da retina. A metodologia é dividida <strong>em</strong> três partes: a correcção da não<br />
uniformida<strong>de</strong> da iluminação, a localização <strong>de</strong> manchas e a mo<strong>de</strong>lação das manchas.<br />
Serão também apresentados os resultados da aplicação <strong>de</strong>sta metodologia <strong>em</strong> <strong>imagens</strong> com manchas<br />
<strong>de</strong> <strong>Drusas</strong> e comparados com <strong>imagens</strong> previamente marcadas por médicos oftalmologistas.<br />
Uma das anomalias da retina que são inspeccionadas pelos médicos oftalmologistas durante a examinação <strong>de</strong><br />
um paciente é a presença <strong>de</strong> manchas <strong>de</strong> <strong>Drusas</strong>. Estas são um importante factor <strong>de</strong> risco <strong>de</strong> Degeneração<br />
Macular Relacionada com a Ida<strong>de</strong> (DMRI) que é uma das principais causas <strong>de</strong> cegueira irreversível nos<br />
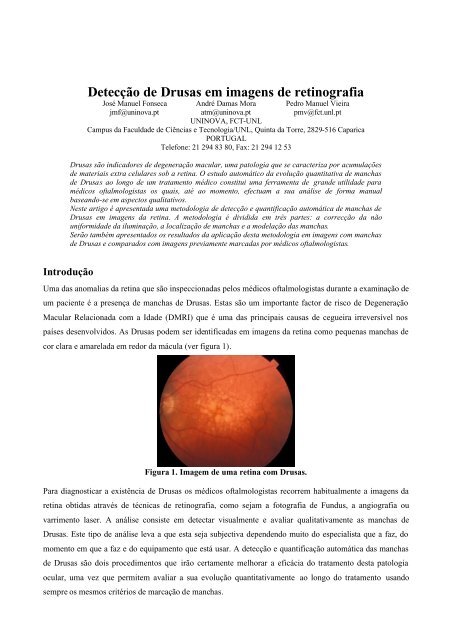
países <strong>de</strong>senvolvidos. As <strong>Drusas</strong> po<strong>de</strong>m ser i<strong>de</strong>ntificadas <strong>em</strong> <strong>imagens</strong> da retina como pequenas manchas <strong>de</strong><br />
cor clara e amarelada <strong>em</strong> redor da mácula (ver figura 1).<br />
Figura 1. Imag<strong>em</strong> <strong>de</strong> uma retina com <strong>Drusas</strong>.<br />
Para diagnosticar a existência <strong>de</strong> <strong>Drusas</strong> os médicos oftalmologistas recorr<strong>em</strong> habitualmente a <strong>imagens</strong> da<br />
retina obtidas através <strong>de</strong> técnicas <strong>de</strong> <strong>retinografia</strong>, como sejam a fotografia <strong>de</strong> Fundus, a angiografia ou<br />
varrimento laser. A análise consiste <strong>em</strong> <strong>de</strong>tectar visualmente e avaliar qualitativamente as manchas <strong>de</strong><br />
<strong>Drusas</strong>. Este tipo <strong>de</strong> análise leva a que esta seja subjectiva <strong>de</strong>pen<strong>de</strong>ndo muito do especialista que a faz, do<br />
momento <strong>em</strong> que a faz e do equipamento que está usar. A <strong>de</strong>tecção e quantificação automática das manchas<br />
<strong>de</strong> <strong>Drusas</strong> são dois procedimentos que irão certamente melhorar a eficácia do tratamento <strong>de</strong>sta patologia<br />
ocular, uma vez que permit<strong>em</strong> avaliar a sua evolução quantitativamente ao longo do tratamento usando<br />
s<strong>em</strong>pre os mesmos critérios <strong>de</strong> marcação <strong>de</strong> manchas.
A complexida<strong>de</strong> das <strong>imagens</strong> da retina, que inclu<strong>em</strong> o nervo óptico, as veias e eventuais anomalias,<br />
associada ao pouco contraste e à não uniformida<strong>de</strong> da iluminação da imag<strong>em</strong> faz<strong>em</strong> do <strong>de</strong>senvolvimento <strong>de</strong><br />
algoritmos <strong>de</strong> <strong>de</strong>tecção <strong>de</strong> manchas <strong>de</strong> <strong>Drusas</strong> uma tarefa complexa e difícil. Diversas experiências têm sido<br />
levadas a cabo usando técnicas <strong>de</strong> compensação da não uniformida<strong>de</strong> da iluminação [1, 2] e <strong>de</strong><br />
melhoramento do contraste combinadas com algoritmos <strong>de</strong> segmentação <strong>de</strong> imag<strong>em</strong> (local, global, difusa,<br />
etc.) [3, 4]. No entanto, a maioria das aplicações apresenta tendência para produzir falsos positivos.<br />
Neste artigo é apresentada uma metodologia <strong>de</strong> <strong>de</strong>tecção automática <strong>de</strong> <strong>Drusas</strong> <strong>em</strong> <strong>imagens</strong> <strong>de</strong> <strong>retinografia</strong><br />
que po<strong>de</strong> ser divida <strong>em</strong> três fases: a localização das manchas, a sua mo<strong>de</strong>lação e a rejeição <strong>de</strong> manchas não<br />
relacionadas com <strong>Drusas</strong>. Para a localização das manchas foi <strong>de</strong>senvolvido um algoritmo <strong>de</strong> <strong>de</strong>tecção <strong>de</strong><br />
máximos [5] que recorre ao gradiente da imag<strong>em</strong> para fazer uma etiquetag<strong>em</strong> da imag<strong>em</strong> e posteriormente<br />
proce<strong>de</strong>r à sua segmentação. A segunda parte da metodologia [1] consiste <strong>em</strong> caracterizar cada uma das<br />
manchas e <strong>de</strong>finir o seu contorno. Nesta fase é utilizada a intensida<strong>de</strong> da imag<strong>em</strong> como informação<br />
tridimensional da imag<strong>em</strong>, permitindo mo<strong>de</strong>lar não só o contorno da mancha como também a sua forma<br />
tridimensional. A última fase consiste num pós-processamento recorrendo a técnicas <strong>de</strong> apoio à <strong>de</strong>cisão com<br />
vista a rejeitar as manchas que não estão relacionadas com <strong>Drusas</strong>. Este passo está ainda <strong>em</strong> fase <strong>de</strong><br />
<strong>de</strong>senvolvimento pelo que não será apresentado neste artigo.<br />
Estado da arte<br />
O primeiro trabalho importante <strong>de</strong> <strong>de</strong>tecção automática não supervisionada <strong>de</strong> manchas <strong>de</strong> <strong>Drusas</strong> <strong>em</strong><br />
<strong>imagens</strong> <strong>de</strong> <strong>retinografia</strong> foi publicado <strong>em</strong> 1986 por Peli and Lahav [3] e foi posteriormente <strong>de</strong>senvolvido por<br />
Sebag et al. [6] do New England Medical Center e da Tufts University School of Medicine. O trabalho<br />
consistiu <strong>em</strong> dividir a imag<strong>em</strong> <strong>em</strong> janelas <strong>de</strong> 8x8 pixeis, calculando <strong>em</strong> cada janela um valor <strong>de</strong> binarização<br />
que é posteriormente interpolado usando uma interpolação bilinear e usado na binarização da janela. Os<br />
resultados obtidos foram consi<strong>de</strong>rados aceitáveis, mas revelando uma tendência para classificar pequenas<br />
irregularida<strong>de</strong>s na imag<strong>em</strong> como <strong>Drusas</strong> (falsos positivos).<br />
Em 1991, Philips et al. [7] da Universida<strong>de</strong> <strong>de</strong> Aber<strong>de</strong>en <strong>de</strong>monstraram que a combinação <strong>de</strong> binarizações<br />
locais e globais <strong>em</strong> <strong>imagens</strong> <strong>de</strong> funduscopia po<strong>de</strong>m ser utilizadas para <strong>de</strong>tectar <strong>Drusas</strong>. Mais tar<strong>de</strong>, <strong>em</strong> 1995,<br />
Kirkpatrick et al. [4] do mesmo grupo <strong>de</strong> investigação propôs a utilização <strong>de</strong> um algoritmo <strong>de</strong> region<br />
growing para <strong>de</strong>tectar <strong>Drusas</strong> <strong>em</strong> <strong>imagens</strong> obtidas por oftalmoscopia <strong>de</strong> varrimento Laser. Embora ambos<br />
tenham produzido resultados idênticos <strong>em</strong> <strong>imagens</strong> do mesmo paciente, ambos os algoritmos não efectuam<br />
nenhum pós processamento dos resultados levando a que sejam gerados muitos falsos positivos.<br />
Uma aproximação ao probl<strong>em</strong>a da <strong>de</strong>tecção <strong>de</strong> <strong>Drusas</strong> usando Lógica Difusa foi apresentada <strong>em</strong> 2000 por<br />
Thdibaoui et al. [8] da Universida<strong>de</strong> <strong>de</strong> Paris. O passo inicial do algoritmo consiste <strong>em</strong> dividir os pixeis <strong>em</strong><br />
três classes: fundo, <strong>Drusas</strong> e ambíguos, <strong>de</strong> acordo com a sua intensida<strong>de</strong>. O último passo consiste <strong>em</strong><br />
classificar iterativamente os pixeis ambíguos numa das outras duas classes usando Lógica Difusa.<br />
Uma segmentação <strong>de</strong> <strong>Drusas</strong> baseada numa reconstrução geodésica da imag<strong>em</strong> foi proposta <strong>em</strong> 2001 por<br />
Sbeh et al. da Universida<strong>de</strong> Paris-Dauphine [9, 10]. O algoritmo, após aplicar um pré-processamento para o<br />
realce <strong>de</strong> contornos, <strong>de</strong>tecta máximos locais e juntamente os seus pixeis vizinhos (vizinhos geodésicos)
extrai o fundo. Este último passo é efectuado subtraindo um valor pré-<strong>de</strong>terminado ao máximo local. Os<br />
resultados obtidos po<strong>de</strong>m ser consi<strong>de</strong>rados bons, mas este algoritmo po<strong>de</strong> ser classificado como uma técnica<br />
<strong>de</strong> segmentação adaptativa e consequent<strong>em</strong>ente t<strong>em</strong> os mesmos probl<strong>em</strong>as <strong>de</strong> <strong>de</strong>tecção <strong>de</strong> falsos positivos<br />
que apresentaram os trabalhos prece<strong>de</strong>ntes.<br />
Com esta pequena apresentação <strong>de</strong> trabalhos relacionados po<strong>de</strong>-se concluir que outras técnicas que não <strong>de</strong><br />
segmentação não foram ainda aplicadas a este probl<strong>em</strong>a. É importante fazer notar que todos estes métodos <strong>de</strong><br />
segmentação têm a mesma tendência <strong>de</strong> produzir falsos positivos, especialmente quando a imag<strong>em</strong> t<strong>em</strong><br />
pequenas irregularida<strong>de</strong>s e que não é efectuado um pós-processamento para eliminação <strong>de</strong> manchas que não<br />
estejam relacionadas com <strong>Drusas</strong>.<br />
Localização <strong>de</strong> Manchas<br />
O algoritmo <strong>de</strong> <strong>de</strong>tecção e quantificação <strong>de</strong> <strong>Drusas</strong> proposto é baseado na mo<strong>de</strong>lação das manchas para<br />
assegurar que a segmentação da imag<strong>em</strong> seja consistente com formas geométricas pré-<strong>de</strong>finidas. Para obter<br />
melhores resultados do processo <strong>de</strong> mo<strong>de</strong>lação é conveniente fornecer ao algoritmo a localização<br />
aproximada do centro das manchas <strong>de</strong> <strong>Drusas</strong>.<br />
Neste artigo é proposto um algoritmo <strong>de</strong> <strong>de</strong>tecção <strong>de</strong> máximos locais que t<strong>em</strong> como característica principal<br />
uma boa imunida<strong>de</strong> ao ruído. É um algoritmo <strong>de</strong> segmentação <strong>de</strong> imag<strong>em</strong> que recorre ao gradiente da<br />
imag<strong>em</strong> para efectuar uma etiquetag<strong>em</strong> da mesma. Em <strong>imagens</strong> <strong>de</strong> média resolução existe certamente mais<br />
do que um pixel cujo gradiente esteja na direcção <strong>de</strong> um máximo local e seguindo este mesmo gradiente,<br />
pixel a pixel, um máximo local será encontrado. Este será o princípio <strong>de</strong> funcionamento do algoritmo<br />
proposto que é similar aos algoritmos <strong>de</strong> etiquetag<strong>em</strong> <strong>de</strong> componentes ligados e transformada <strong>de</strong> Watershed.<br />
O algoritmo <strong>de</strong> localização <strong>de</strong> <strong>Drusas</strong> t<strong>em</strong> quatro fases distintas: a <strong>de</strong>terminação do gradiente, a propagação<br />
<strong>de</strong> etiquetas, a compatibilização <strong>de</strong> etiquetas e finalmente a junção <strong>de</strong> etiquetas que pelas suas características<br />
po<strong>de</strong>m ser consi<strong>de</strong>radas como pertencentes ao mesmo máximo local. Para ilustrar o algoritmo este será<br />
aplicado à imag<strong>em</strong> apresentada na figura 2.a, um <strong>de</strong>talhe <strong>de</strong> uma imag<strong>em</strong> on<strong>de</strong> são visíveis duas <strong>Drusas</strong>.<br />
O gradiente da imag<strong>em</strong> (figura 2.b) é calculado utilizando o operador <strong>de</strong> Sobel numa janela <strong>de</strong> 3x3 pixeis,<br />
<strong>de</strong>terminando <strong>em</strong> cada pixel um vector que indica a direcção para próximo pixel <strong>de</strong> intensida<strong>de</strong> superior.<br />
Uma vez que o operador analisa a vizinhança <strong>em</strong> redor <strong>de</strong> cada pixel, muitos efeitos <strong>de</strong>vido a ruído po<strong>de</strong>m<br />
ser eliminados.<br />
A segunda fase (figura 2.c) consiste <strong>em</strong> analisar a imag<strong>em</strong> sequencialmente da esquerda para a direita e <strong>de</strong><br />
1 2 3 4 5 6 7 8<br />
9 1 4 5 6 7 10 11<br />
1 12 6 6 7 10 11 13<br />
14 15 16 7 17 10 13 18<br />
19 20 21 7 7 10 18 22<br />
23 24 25 25 25 7 22 26<br />
27 28 29 30 7 31 32 33<br />
1 1 1 1 1 1 7 7<br />
1 1 1 1 1 7 7 7<br />
1 1 1 1 7 7 7 7<br />
1 1 1 7 7 7 7 7<br />
1 1 7 7 7 7 7 7<br />
1 7 7 7 7 7 7 7<br />
1 7 7 7 7 7 7 7<br />
34 35 36 37 37 38 39 40 1 7 7 7 7 7 7 7<br />
(a) (b) (c) (d)<br />
Figura. 2 - Ex<strong>em</strong>plo do algoritmo <strong>de</strong> localização <strong>de</strong> <strong>Drusas</strong> (a) Imag<strong>em</strong> original; (b) Gradiente da<br />
imag<strong>em</strong>; (c) Propagar etiquetas; (d) Compatibilização <strong>de</strong> etiquetas.
cima para baixo, atribuindo a cada pixel não analisado uma nova etiqueta e propagando-a na direcção do<br />
gradiente até que este indique um pixel já analisado. S<strong>em</strong>pre que esta última situação ocorra e que a etiqueta<br />
a propagar seja diferente da etiqueta seguinte, estas serão <strong>de</strong>finidas t<strong>em</strong>porariamente como compatíveis.<br />
A terceira fase correspon<strong>de</strong> a compatibilizar todas as etiquetas que foram i<strong>de</strong>ntificadas no passo anterior<br />
criando uma imag<strong>em</strong> segmentada <strong>em</strong> zonas que contribu<strong>em</strong> para um máximo local. O pixel <strong>de</strong> maior<br />
intensida<strong>de</strong> <strong>de</strong> cada etiqueta é <strong>de</strong>finido como o máximo local.<br />
Após esta fase e <strong>de</strong>pen<strong>de</strong>ndo do tipo e quantida<strong>de</strong> <strong>de</strong> ruído presente na imag<strong>em</strong>, o algoritmo po<strong>de</strong> gerar uma<br />
imag<strong>em</strong> <strong>de</strong>masiado segmentada. Nestes casos é aplicado um passo <strong>de</strong> junção <strong>de</strong> zonas vizinhas que<br />
pertençam ao mesmo máximo local, sendo a condição <strong>de</strong> junção que entre os dois máximos locais das zonas<br />
a unir seja possível percorrer um caminho s<strong>em</strong> que a intensida<strong>de</strong> da imag<strong>em</strong> não <strong>de</strong>sça abaixo <strong>de</strong> um nível<br />
pré-<strong>de</strong>terminado.<br />
Mo<strong>de</strong>lação <strong>de</strong> Manchas<br />
O próximo passo na <strong>de</strong>tecção e quantificação <strong>de</strong> <strong>Drusas</strong> consiste <strong>em</strong> mo<strong>de</strong>lar cada uma das manchas<br />
<strong>de</strong>tectadas. Para criar o mo<strong>de</strong>lo <strong>de</strong> uma mancha é importante ter <strong>em</strong> conta que a génese das manchas <strong>de</strong><br />
<strong>Drusas</strong> é uma elevação suave da superfície da retina <strong>de</strong>vido a acumulação <strong>de</strong> materiais extra-celulares<br />
<strong>de</strong>baixo da retina. Usando a intensida<strong>de</strong> da imag<strong>em</strong> como informação tridimensional (coor<strong>de</strong>nada z) para<br />
estimar a elevação da superfície da retina é possível estimar a forma tridimensional <strong>de</strong> uma mancha <strong>de</strong> Drusa<br />
(ver figura 3.a). Como é possível observar, o gráfico po<strong>de</strong> ass<strong>em</strong>elhar-se a uma função gaussiana (figura 3.b)<br />
sobre um fundo com ruído. Estas observações motivaram a utilização <strong>de</strong> funções gaussianas para mo<strong>de</strong>lar as<br />
manchas <strong>de</strong> <strong>Drusas</strong>. A função utilizada é obtida através da seguinte equação:<br />
sendo:<br />
⎛ X<br />
−⎜<br />
⎜ s<br />
2<br />
Y<br />
+<br />
s<br />
2<br />
2<br />
⎞<br />
⎟ d<br />
⎟<br />
⎠<br />
⎝ x y<br />
G ( x,<br />
y)<br />
= A * e + Z on<strong>de</strong>,<br />
0<br />
X =<br />
Y =<br />
s<br />
y<br />
( x − x0<br />
) ⋅ cos(<br />
θ ) + ( y − y0<br />
) ⋅ sin(<br />
θ )<br />
−(<br />
x − x ) ⋅ sin(<br />
θ ) + ( y − y ) ⋅ cos(<br />
θ )<br />
= s<br />
A – amplitu<strong>de</strong> θ - rotação<br />
(x0, y0) – coor<strong>de</strong>nadas do centro sF – factor <strong>de</strong> forma entre sx e sy<br />
d – Factor <strong>de</strong> forma sx – factor <strong>de</strong> forma no plano x<br />
Z0 – valor <strong>de</strong> fundo<br />
(a) (b) (c)<br />
Figura 3. (a) Forma tridimensional <strong>de</strong> uma mancha <strong>de</strong> Drusa; (b) Função gaussiana;<br />
(c) Mo<strong>de</strong>lação <strong>de</strong> uma imag<strong>em</strong> com manchas <strong>de</strong> <strong>Drusas</strong>.<br />
F<br />
⋅ s<br />
x<br />
0<br />
0<br />
(2)
Esta é uma versão modificada da função gaussiana que acrescenta o factor <strong>de</strong> forma d possibilitando mais<br />
um grau <strong>de</strong> liberda<strong>de</strong> à função, permitindo que esta se torne mais suave ou com arestas mais pronunciadas.<br />
Para a pesquisa dos parâmetros das funções gaussianas que melhor mo<strong>de</strong>lam as manchas <strong>de</strong> <strong>Drusas</strong>, foi<br />
utilizado o algoritmo <strong>de</strong> optimização <strong>de</strong> funções Levenberg-Marquardt [11]. O resultado da mo<strong>de</strong>lação <strong>de</strong><br />
uma imag<strong>em</strong> <strong>de</strong> retina encontra-se apresentado na figura 3.c, on<strong>de</strong> sobre a imag<strong>em</strong> original (malha) foi<br />
sobreposto a imag<strong>em</strong> estimada. O contorno das manchas po<strong>de</strong> ser obtido marcando o contorno das funções a<br />
uma percentag<strong>em</strong> da sua amplitu<strong>de</strong>.<br />
Apresentação <strong>de</strong> Resultados<br />
Neste capítulo será apresentada a aplicação da metodologia <strong>de</strong> <strong>de</strong>tecção <strong>de</strong> <strong>Drusas</strong> a uma imag<strong>em</strong> (figura 4.c)<br />
e comparada quantitativamente com <strong>imagens</strong> marcadas por médicos oftalmologistas. A comparação será<br />
efectuada com base no número <strong>de</strong> manchas <strong>de</strong>tectadas e na área das manchas. As <strong>imagens</strong> são marcadas<br />
manualmente <strong>em</strong> fotografia com caneta (figura 4.a) e também <strong>em</strong> computador <strong>de</strong> forma assistida (figura 4.b)<br />
numa aplicação <strong>de</strong>senvolvida especificamente para o efeito, MD3RI [12].<br />
Antes <strong>de</strong> analisar os resultados obtidos pela ferramenta automática é <strong>de</strong> salientar a subjectivida<strong>de</strong> <strong>de</strong>sta<br />
análise. Comparando as marcações a caneta e a computador efectuadas pelo mesmo médico oftalmologista<br />
<strong>em</strong> <strong>imagens</strong> da retina verifica-se que <strong>em</strong> média apenas 70% dos pixeis são marcados <strong>em</strong> ambas as <strong>imagens</strong>.<br />
Sendo <strong>de</strong> prever que esta disparida<strong>de</strong> seja ainda mais acentuada comparando análises <strong>de</strong> médicos diferentes.<br />
O objectivo final da <strong>de</strong>tecção automática será obter resultados que sejam aprovados pela maioria dos<br />
médicos oftalmologistas.<br />
Comparando os resultados da <strong>de</strong>tecção automática com uma imag<strong>em</strong> contendo apenas os pixeis marcados<br />
simultaneamente a caneta e a computador é possível verificar que 22% dos máximos locais ficaram por<br />
<strong>de</strong>tectar e que 40% dos máximos locais <strong>de</strong>tectados correspon<strong>de</strong>ram a zonas não assinaladas. Estes são<br />
valores na mesma or<strong>de</strong>m <strong>de</strong> gran<strong>de</strong>za dos verificados noutras <strong>imagens</strong>, pelo que se torna necessário ajustar<br />
os parâmetros do algoritmo <strong>de</strong> <strong>de</strong>tecção para <strong>de</strong>tectar manchas <strong>de</strong> menores dimensões e simultaneamente<br />
efectuar uma selecção dos máximos locais com base nas suas características <strong>de</strong> intensida<strong>de</strong> e dimensão. Os<br />
resultados da mo<strong>de</strong>lação das manchas ainda se encontram um pouco aquém do esperado, havendo cerca <strong>de</strong><br />
(a) (b) (c)<br />
Figura. 4 - (a) Imag<strong>em</strong> marcada a caneta; (b) Imag<strong>em</strong> com marcada assistida;<br />
(c) Imag<strong>em</strong> marcada automaticamente.
20% <strong>de</strong> pixeis falsos positivos e 20% <strong>de</strong> pixeis falsos negativos. Estes valores <strong>de</strong>v<strong>em</strong>-se principalmente à<br />
incapacida<strong>de</strong> da ferramenta Matlab <strong>em</strong> mo<strong>de</strong>lar a imag<strong>em</strong> <strong>de</strong> uma só vez, tendo <strong>de</strong> ser efectuada <strong>em</strong> janela<br />
<strong>de</strong>slizante <strong>de</strong> 100x100 pixeis.<br />
Conclusão<br />
O artigo apresenta uma nova aproximação ao probl<strong>em</strong>a <strong>de</strong> <strong>de</strong>tecção <strong>de</strong> <strong>Drusas</strong> <strong>em</strong> <strong>imagens</strong> <strong>de</strong> <strong>retinografia</strong>. A<br />
metodologia apresentada permite não só <strong>de</strong>finir o contorno <strong>de</strong> manchas, como também caracterizar as<br />
mesmas com vista a uma futura classificação das manchas como <strong>Drusas</strong> ou outra estrutura presente na<br />
imag<strong>em</strong>.<br />
O algoritmo <strong>de</strong> localização <strong>de</strong> manchas <strong>de</strong> <strong>Drusas</strong>, que usa como base o gradiente para fazer etiquetag<strong>em</strong> da<br />
imag<strong>em</strong>, apresentou bons resultados <strong>de</strong>tectando todas as manchas mesmo <strong>em</strong> zonas <strong>de</strong> baixo contraste. A<br />
mo<strong>de</strong>lação das manchas através <strong>de</strong> funções gaussianas tridimensionais permitiu efectuar uma segmentação<br />
da imag<strong>em</strong> adaptada à forma típica das manchas <strong>de</strong> <strong>Drusas</strong> eliminando bastantes artefactos da imag<strong>em</strong><br />
<strong>de</strong>vido a ruído e outras irregularida<strong>de</strong>s na superfície da retina.<br />
Como trabalho futuro preten<strong>de</strong>-se aperfeiçoar o processo <strong>de</strong> mo<strong>de</strong>lação das manchas utilizando outras<br />
funções e/ou outros métodos <strong>de</strong> optimização <strong>de</strong> funções e <strong>de</strong>senvolver o último passo <strong>de</strong> pós-processamento<br />
dos resultados, com vista a separar as manchas <strong>de</strong> <strong>Drusas</strong> das restantes.<br />
Agra<strong>de</strong>cimentos<br />
Os autores agra<strong>de</strong>c<strong>em</strong> o apoio da Fundação para a Ciência e Tecnologia através do Programa Operacional<br />
para a Ciência e Inovação POCI-2010 e do Fundo Social Europeu, e também à Universida<strong>de</strong> <strong>de</strong> Aber<strong>de</strong>en e<br />
ao Hospital <strong>de</strong> Santa Maria pela disponibilização das <strong>imagens</strong> e na analise das <strong>imagens</strong> usadas neste estudo.<br />
Referências<br />
[1] A. Mora, J. Fonseca, and P. Vieira. Drusen Deposits Mo<strong>de</strong>lling with Illumination Correction, in<br />
Biomed-2005, Innsbruck, Austria, 2005.<br />
[2] R. T. Smith, et al., A Method of Drusen Measur<strong>em</strong>ent Based on the Geometry of Fundus Reflectance,<br />
BioMedical Engineering OnLine, vol. 2(10), 2003.<br />
[3] E. Peli and M. Lahav, Drusen Measur<strong>em</strong>ent from Fundus Photographs Using Computer Image Analysis,<br />
Ophtalmology, vol. 93, p. 1575-1580, 1986.<br />
[4] J. N. P. Kirkpatrick, et al., Quantitative image analysis of macular drusen from fundus photographs and<br />
scanning laser ophthalmoscope images, Eye (Royal College of Ophthalmologists), vol. 9, p. 48-55, 1995.<br />
[5] A. Mora, P. Vieira, and J. Fonseca. Drusen Deposits on Retina Images: Detection and Mo<strong>de</strong>ling, in<br />
MEDSIP-2004, Malta, 2004.<br />
[6] M. Sebag, E. Peli, and M. Lahav, Image analysis of changes in drusen area, Acta Ophtalmologica, vol.<br />
69, p. 603-610, 1991.<br />
[7] R. P. Phillips, et al., Quantification of diabetic maculopathy by digital imaging of the fundus, Eye, vol. 5 (<br />
Pt 1), p. 130-137, 1991.<br />
[8] A. Thdibaoui, A. Rajn, and P. Bunel. A fuzzy logic approach to drusen <strong>de</strong>tection in retinal angiographic<br />
images, in 15th International Conference on Pattern Recognition, Barcelona, Spain, 2000.<br />
[9] Z. B. Sbeh, et al., A New Approach of Geo<strong>de</strong>sic Reconstruction for Drusen Segmentation in Eye Fundus<br />
Images, IEEE TRANSACTIONS ON MEDICAL IMAGING, vol. 20(12), p. 1321-1333, 2001.<br />
[10] Z. B. Sbeh, et al. An adaptive contrast method for segmentation of drusen, in International Conference<br />
on Image Processing, 1997.<br />
[11] D. W. Marquardt, An algorithm for least-squares estimation of non-linear parameters, Journal of the<br />
Society for Industrial and Applied Math<strong>em</strong>atics, vol. 11(2), p. 431-441, 1963.<br />
[12] Uninova, MD3RI - Manual Drusen Deposits Detection on Retina Images, 2005.