Curso de Dinâmica das Estruturas 1 I – INTRODUÇÃO1 O ... - IME
Curso de Dinâmica das Estruturas 1 I – INTRODUÇÃO1 O ... - IME
Curso de Dinâmica das Estruturas 1 I – INTRODUÇÃO1 O ... - IME

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Curso</strong> <strong>de</strong> <strong>Dinâmica</strong> <strong>das</strong> <strong>Estruturas</strong> 1<br />
I <strong>–</strong> INTRODUÇÃO 1<br />
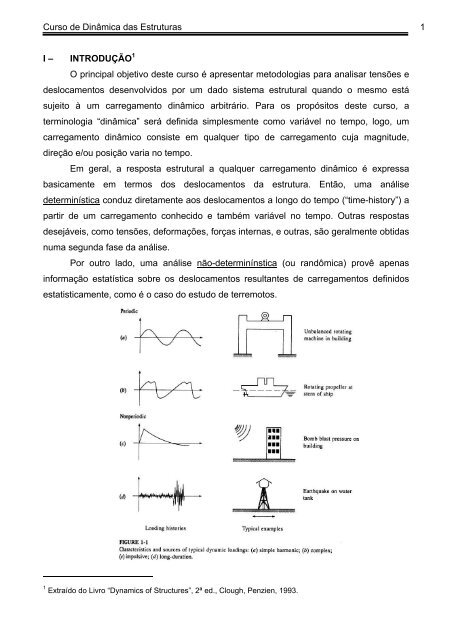
O principal objetivo <strong>de</strong>ste curso é apresentar metodologias para analisar tensões e<br />
<strong>de</strong>slocamentos <strong>de</strong>senvolvidos por um dado sistema estrutural quando o mesmo está<br />
sujeito à um carregamento dinâmico arbitrário. Para os propósitos <strong>de</strong>ste curso, a<br />
terminologia “dinâmica” será <strong>de</strong>finida simplesmente como variável no tempo, logo, um<br />
carregamento dinâmico consiste em qualquer tipo <strong>de</strong> carregamento cuja magnitu<strong>de</strong>,<br />
direção e/ou posição varia no tempo.<br />
Em geral, a resposta estrutural a qualquer carregamento dinâmico é expressa<br />
basicamente em termos dos <strong>de</strong>slocamentos da estrutura. Então, uma análise<br />
<strong>de</strong>terminística conduz diretamente aos <strong>de</strong>slocamentos a longo do tempo (“time-history”) a<br />
partir <strong>de</strong> um carregamento conhecido e também variável no tempo. Outras respostas<br />
<strong>de</strong>sejáveis, como tensões, <strong>de</strong>formações, forças internas, e outras, são geralmente obti<strong>das</strong><br />
numa segunda fase da análise.<br />
Por outro lado, uma análise não-<strong>de</strong>terminínstica (ou randômica) provê apenas<br />
informação estatística sobre os <strong>de</strong>slocamentos resultantes <strong>de</strong> carregamentos <strong>de</strong>finidos<br />
estatisticamente, como é o caso do estudo <strong>de</strong> terremotos.<br />
1 Extraído do Livro “Dynamics of Structures”, 2ª ed., Clough, Penzien, 1993.
2 Notas <strong>de</strong> Aula <strong>–</strong> Prof. Luiz A. C. Moniz <strong>de</strong> Aragão Filho<br />
Na análise <strong>de</strong> uma estrutura linear, é conveniente distinguir entre os componentes<br />
estáticos e dinâmicos <strong>de</strong> um conjunto <strong>de</strong> carregamentos aplicados, e avaliar a resposta a<br />
cada tipo <strong>de</strong> carregamento separadamente, e então superpor os efeitos a fim <strong>de</strong> se obter<br />
a solicitação final.<br />
Um problema estrutural dinâmico difere da sua abordagem <strong>de</strong> carregamento<br />
estático em dois importantes aspectos.<br />
A primeira diferença a ser percebida, trata-se da natureza <strong>de</strong> variação no tempo do<br />
problema dinâmico. Devido ao fato <strong>de</strong> tanto o carregamento quanto a resposta da<br />
estrutura variarem no tempo é evi<strong>de</strong>nte que o problema dinâmico não tem uma única<br />
solução, ao contrário do problema estático. O projetista <strong>de</strong>verá então estabelecer uma<br />
sucessão <strong>de</strong> soluções correspon<strong>de</strong>ntes à todo o período <strong>de</strong> interesse. Logo, uma análise<br />
dinâmica é claramente mais complexa e <strong>de</strong>morada do que uma análise estática.<br />
A segunda e fundamental distinção, refere-se ao fato <strong>de</strong> que em uma estrutura<br />
sujeita a um carregamento estático, os esforços internos e flechas assumi<strong>das</strong> <strong>de</strong>pen<strong>de</strong>m<br />
somente do carregamento imposto e po<strong>de</strong>m ser calculados por equilíbrio <strong>de</strong> forças<br />
elásticas. Por outro lado, se o carregamento é aplicado dinamicamente, os <strong>de</strong>slocamentos<br />
resultantes da estrutura não <strong>de</strong>pen<strong>de</strong>m somente do carregamento, mas também <strong>das</strong><br />
forças inerciais que se opõem às acelerações que as produzem.<br />
Em geral, se as forças inerciais representarem uma porção significativa do<br />
carregamentos total equilibrado pelos esforços internos elásticos da estrutura, então o<br />
caráter dinâmico do problema <strong>de</strong>ve ser consi<strong>de</strong>rado na solução do problema. Entretanto,<br />
se os movimentos são tão lentos que as forças <strong>de</strong> inércia apresentam-se muito pequenas,<br />
a análise da resposta da estrutura para qualquer instante po<strong>de</strong> ser realizada<br />
simplesmente pela análise estática, apesar do carregamento e resposta serem variáveis<br />
no tempo.
<strong>Curso</strong> <strong>de</strong> <strong>Dinâmica</strong> <strong>das</strong> <strong>Estruturas</strong> 3<br />
II <strong>–</strong> SISTEMAS DE UM GRAU DE LIBERDADE<br />
II.1 <strong>–</strong> VIBRAÇÕES LIVRES<br />
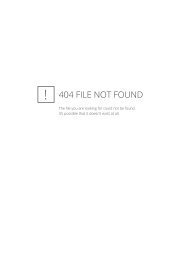
II.1.1 - Equação do Equilíbrio Dinâmico <strong>–</strong> Equação do Movimento<br />
• Gran<strong>de</strong>zas físicas envolvi<strong>das</strong>:<br />
MASSA (m)<br />
PROPRIEDADES ELÁSTICAS (k)<br />
AMORTEC<strong>IME</strong>NTO (c)<br />
FORÇA EXTERNA DINÂMICA (p(t))<br />
• Princípio <strong>de</strong> d’Alembert:<br />
• Equação <strong>de</strong> equilíbrio:<br />
“A massa m <strong>de</strong>senvolve uma força <strong>de</strong> inércia proporcional<br />
a sua aceleração e oposta a ela.”<br />
() t − mx&<br />
& ( t ) 0<br />
p =<br />
() t + f () t + f () t = p()<br />
t<br />
fI D S<br />
FORÇAS DE INÉRCIA: fI () t = m ⋅ x&<br />
& () t<br />
FORÇAS DE AMORTEC<strong>IME</strong>NTO: fD () t c ⋅ x&<br />
() t<br />
FORÇAS ELÁSTICAS: () t = k ⋅ x()<br />
t<br />
f S<br />
() t + c ⋅ x&<br />
() t + k ⋅ x()<br />
t p()<br />
t<br />
m ⋅ x&<br />
&<br />
=<br />
= (Viscoso)
4 Notas <strong>de</strong> Aula <strong>–</strong> Prof. Luiz A. C. Moniz <strong>de</strong> Aragão Filho<br />
• Influência da força gravitacional:<br />
() t + c ⋅ x&<br />
() t + k ⋅ x()<br />
t = p()<br />
t W<br />
m ⋅ x&<br />
&<br />
+<br />
FORÇA PESO: W = m ⋅ g<br />
DEFORMAÇÃO DA MOLA:<br />
DESLOCAMENTO TOTAL:<br />
FORÇAS ELÁSTICAS:<br />
∆st<br />
= W / k<br />
x() t = x()<br />
t + ∆st<br />
fS () t = k ⋅ x()<br />
t + k ⋅ ∆st<br />
() t + c ⋅ x&<br />
() t + k ⋅ x()<br />
t + k ⋅ ∆ = p()<br />
t W<br />
m ⋅ x&<br />
&<br />
st +<br />
() t + c ⋅ x&<br />
() t + k ⋅ x()<br />
t p()<br />
t<br />
⇒ m ⋅ x&<br />
&<br />
=<br />
A equação <strong>de</strong> movimento expressa em relação à posição do equilíbrio estático do sistema<br />
dinâmico não é afetada por forças gravitacionais.<br />
Logo, as flechas totais, tensões máximas, etc, serão obti<strong>das</strong> pela adição <strong>das</strong> respostas<br />
estáticas aos resultados obtidos da análise dinâmica.
<strong>Curso</strong> <strong>de</strong> <strong>Dinâmica</strong> <strong>das</strong> <strong>Estruturas</strong> 5<br />
II.1.2 <strong>–</strong> Vibrações Livres Não-Amorteci<strong>das</strong><br />
• Equação <strong>de</strong> equilíbrio:<br />
VIBRAÇÕES LIVRES: p () t = 0<br />
VIBRAÇÕES NÃO-AMORTECIDAS: c → 0<br />
() t + k ⋅ x()<br />
t 0<br />
m ⋅ x&<br />
& =<br />
k<br />
x & 2<br />
() t + ⋅ x()<br />
t = 0 ⇒ x&<br />
& () t + ω ⋅ x()<br />
t = 0 on<strong>de</strong><br />
m<br />
Substituindo na equação anterior:<br />
⇒ x<br />
() t<br />
() t<br />
⇒ x = A ⋅ e<br />
s<br />
2<br />
= A<br />
+ ω<br />
2<br />
= 0<br />
⇒ s = ± iω<br />
1<br />
⋅ e<br />
iωt<br />
st<br />
+ A<br />
2<br />
⋅ e<br />
−iωt<br />
2 =<br />
ω<br />
On<strong>de</strong> A 1 e A 2 são constantes <strong>de</strong> integração, <strong>de</strong>pen<strong>de</strong>ndo dos valores iniciais <strong>de</strong><br />
<strong>de</strong>slocamento x ( 0)<br />
e velocida<strong>de</strong> x& ( 0)<br />
.<br />
⇒<br />
iωt<br />
⇒ x()<br />
t = A1<br />
⋅ e<br />
−iωt<br />
+ A2<br />
⋅ e<br />
() t = A1<br />
⋅ ( cos ωt<br />
+ i sen ωt<br />
) + A ⋅ ( cos ωt<br />
− i sen ωt<br />
)<br />
() t = cos ωt(<br />
A1<br />
+ A2<br />
) + sen ωt<br />
⋅ i(<br />
A1<br />
A2<br />
)<br />
() t = cos ωt<br />
⋅ ( A ⋅ cos φ)<br />
+ sen ωt<br />
⋅ ( A ⋅ φ)<br />
() t = A ⋅ ( cos ωt<br />
⋅ cos φ + sen ωt<br />
⋅ φ)<br />
x 2<br />
⇒ x −<br />
⇒ x<br />
sen<br />
⇒ x<br />
sen<br />
() t = A ⋅ cos(<br />
ω − φ)<br />
⇒ x<br />
t<br />
AMPLITUDE DO MOV<strong>IME</strong>NTO: = [ x(<br />
0)<br />
]<br />
ÂNGULO FASE:<br />
k<br />
m<br />
( ) 2<br />
0<br />
A<br />
2 ⎡ x&<br />
+ ⎢<br />
⎣ ω<br />
⎤<br />
⎥<br />
⎦<br />
( )<br />
( ) ⎥ ⎡ − x&<br />
0 ⎤<br />
φ = arctg⎢<br />
⎣ω<br />
⋅ x 0 ⎦<br />
O sistema realiza oscilação harmônica simples (OHS ou MHS) com frequência<br />
k<br />
ω = .<br />
m<br />
O termo ω é conhecido como frequência natural, pois, quando colocado em movimento<br />
através <strong>de</strong> condições iniciais não-nulas <strong>de</strong> <strong>de</strong>slocamento e/ou velocida<strong>de</strong>, livre <strong>de</strong><br />
carregamentos e sem amortecimento, sempre oscilará com a mesma frequência ω.
6 Notas <strong>de</strong> Aula <strong>–</strong> Prof. Luiz A. C. Moniz <strong>de</strong> Aragão Filho<br />
• Deslocamento no tempo (item b):<br />
FREQUÊNCIA CIRCULAR: ω ( rad/s)<br />
FREQUÊNCIA CÍCLICA OU DE MOV<strong>IME</strong>NTO:<br />
PERÍODO DE OSCILAÇÃO/VIBRAÇÃO:<br />
f<br />
ω<br />
2π<br />
= ( s Hz)<br />
1 - ≡<br />
1<br />
T = ( s)<br />
f<br />
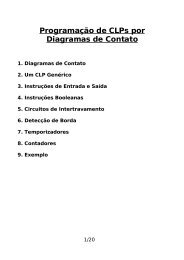
• Representação do movimento no plano imaginário, através <strong>de</strong> um vetor em rotação no<br />
sentido anti-horário com velocida<strong>de</strong> angular ω (item a):<br />
AMPLITUDE: = [ x(<br />
0)<br />
]<br />
ÂNGULO FASE:<br />
( ) 2<br />
0<br />
A<br />
2 ⎡ x&<br />
+ ⎢<br />
⎣ ω<br />
⎤<br />
⎥<br />
⎦<br />
( )<br />
( ) ⎥ ⎡ − x&<br />
0 ⎤<br />
φ = arctg⎢<br />
⎣ω<br />
⋅ x 0 ⎦