Eletrônica Aplicada - Saber Eletrônica
Eletrônica Aplicada - Saber Eletrônica
Eletrônica Aplicada - Saber Eletrônica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Eletrônica</strong> <strong>Aplicada</strong><br />
O Microcontrolador<br />
Para controlar o Kit foi necessário a<br />
utilização de um poderoso microcontrolador<br />
e outros periféricos. Estes componentes<br />
contêm os seguintes elementos:<br />
O poderoso TC1767: É um microcontrolador<br />
de 32 bits da família AUDO<br />
FUTURE, da empresa Infineon Technologies,<br />
e que foi projetado exclusivamente<br />
para aplicações automotivas. Sua<br />
arquitetura baseada na CPU TRICORE<br />
16 I SABER ELETRÔNICA 455 I 2011<br />
tem uma alta performance que, combinada<br />
com sofisticadas capacidades de<br />
um DSP, o transforma numa unidade<br />
microcontroladora única no mercado.<br />
Mais informações no datasheet: http://<br />
migre.me/5N8FQ<br />
Filtro de Entrada<br />
Filtro passivo para sinais analógicos<br />
e digitais e divisores de tensão resistivos<br />
para adaptação de tensões elétricas.<br />
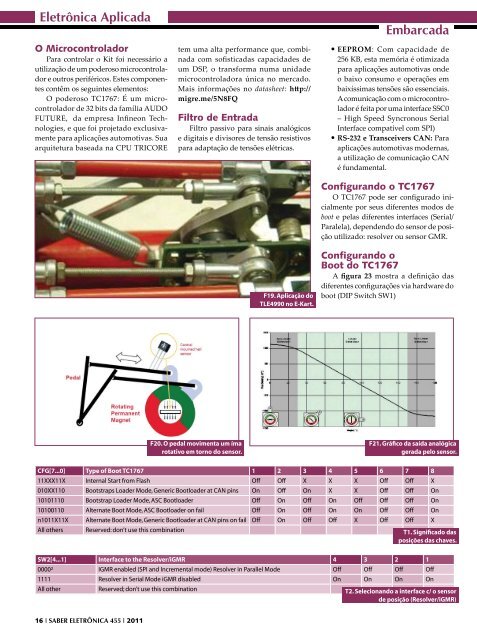
F20. O pedal movimenta um íma<br />
rotativo em torno do sensor.<br />
F19. Aplicação do<br />
TLE4990 no E-Kart.<br />
Embarcada<br />
• EEPROM: Com capacidade de<br />
256 KB, esta memória é otimizada<br />
para aplicações automotivas onde<br />
o baixo consumo e operações em<br />
baixíssimas tensões são essenciais.<br />
A comunicação com o microcontrolador<br />
é feita por uma interface SSC0<br />
– High Speed Syncronous Serial<br />
Interface compatível com SPI)<br />
• RS-232 e Transceivers CAN: Para<br />
aplicações automotivas modernas,<br />
a utilização de comunicação CAN<br />
é fundamental.<br />
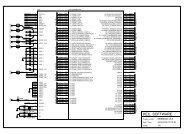
Configurando o TC1767<br />
O TC1767 pode ser configurado inicialmente<br />
por seus diferentes modos de<br />
boot e pelas diferentes interfaces (Serial/<br />
Paralela), dependendo do sensor de posição<br />
utilizado: resolver ou sensor GMR.<br />
Configurando o<br />
Boot do TC1767<br />
A figura 23 mostra a definição das<br />
diferentes configurações via hardware do<br />
boot (DIP Switch SW1)<br />
F21. Gráfico da saída analógica<br />
gerada pelo sensor.<br />
CFG[7...0] Type of Boot TC1767 1 2 3 4 5 6 7 8<br />
11XXX11X Internal Start from Flash Off Off X X X Off Off X<br />
010XX110 Bootstraps Loader Mode, Generic Bootloader at CAN pins On Off On X X Off Off On<br />
10101110 Bootstrap Loader Mode, ASC Bootloader Off On Off On Off Off Off On<br />
10100110 Alternate Boot Mode, ASC Bootloader on fail Off On Off On On Off Off On<br />
n1011X11X Alternate Boot Mode, Generic Bootloader at CAN pins on fail Off On Off Off X Off Off X<br />
All others Reserved: don’t use this combination<br />
T1. Significado das<br />
posições das chaves.<br />
SW2[4...1] Interface to the Resolver/iGMR 4 3 2 1<br />
0000² IGMR enabled (SPI and Incremental mode) Resolver in Parallel Mode Off Off Off Off<br />
1111 Resolver in Serial Mode iGMR disabled On On On On<br />
All other Reserved; don’t use this combination<br />
T2. Selecionando a interface c/ o sensor<br />
de posição (Resolver/iGMR)