Órteses e/ou próteses eletromecânicas e esportivas - Engenharia ...
Órteses e/ou próteses eletromecânicas e esportivas - Engenharia ...
Órteses e/ou próteses eletromecânicas e esportivas - Engenharia ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
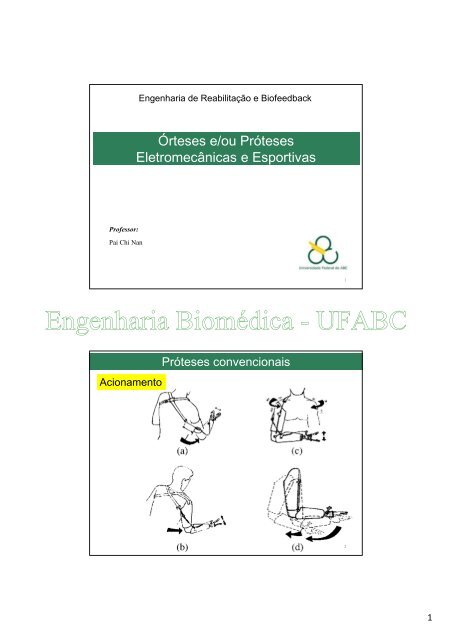
<strong>Engenharia</strong> de Reabilitação e Biofeedback<strong>Órteses</strong> e/<strong>ou</strong> PrótesesEletromecânicas e EsportivasProfessor:Pai Chi Nan1<strong>Engenharia</strong> Biomédica - UFABCAcionamentoPróteses convencionais21
Próteses <strong>eletromecânicas</strong>Fonte de energiabateriasCaracterísticas das principais baterias tamanho AANiCd NiMH Li-ion LiMVoltagem 1.2 1.25 3.6 3.0Densidade de energia (Wh/L) 45 55 100 140Densidade de energia (Wh/Kg) 150 180 225 300Custo ($/Wh) 0.75 - 1.5 1.5 – 3.0 2.5 – 3.5 1.4 – 3.0Ciclos de carga / descarga 1000 800 1000 1000Efeito memória Sim Não Não NãoPoluição ambiental SIm Não Não Não3<strong>Engenharia</strong> Biomédica - UFABCMotores DCCom escovasPróteses <strong>eletromecânicas</strong>Principais atuadores das <strong>próteses</strong>RotorComutatorEscovasÍmã permanenteEnrolamentosEstatorTerminais42
Motores DCCom escovasPróteses <strong>eletromecânicas</strong>Principais atuadores das <strong>próteses</strong>RotorComutatorEscovasNÍmã permanente_+EnrolamentosSSEstator_+Terminais5<strong>Engenharia</strong> Biomédica - UFABCMotores DCSem escovasPróteses <strong>eletromecânicas</strong>Principais atuadores das <strong>próteses</strong>63
Motores DCSem escovasPróteses <strong>eletromecânicas</strong>Principais atuadores das <strong>próteses</strong>NSNS7<strong>Engenharia</strong> Biomédica - UFABCPróteses <strong>eletromecânicas</strong>Motores DCCom escova Sem escovaEficiência Menor MaiorTorque por peso Menor MaiorDesgaste mecânico Maior MenorConfiabilidade Menor MaiorControle Simples ComplexaRuído Maior MenorFaíscas Presente Ausente84
Próteses <strong>eletromecânicas</strong>Dimensionamento de motores DCPerformance máximo• Atuadores não são comparáveis com tecidomuscular em termos de velocidade e força (mesmopeso e volume)• Maximizar velocidade e torqueP= T × ω = cte• Material magnético (feito de terra rara: NdFeB)9<strong>Engenharia</strong> Biomédica - UFABCTorque X velocidadePróteses <strong>eletromecânicas</strong>Motor grande com transmissão automática• Abre e fecha com relação força - engrenagem baixa• Mudança de engrenagem para aumentar a força ediminuir a velocidadeMotor DCEngrenagem105
Próteses <strong>eletromecânicas</strong>Torque X velocidadePreensão sinérgicaAbre e fechaMotor 1: alta velocidade com baixo torqueForça de preensãoMotor 2: baixa velocidade com alto torque11<strong>Engenharia</strong> Biomédica - UFABCControleCérebroPróteses <strong>eletromecânicas</strong>Sinal EMGSNCMúsculoAmplificadorControladorMotor126
Próteses <strong>eletromecânicas</strong>ExemploMecanismo da mãocom luva cosméticaMioeletrodosBateriaSoquete prostético13<strong>Engenharia</strong> Biomédica - UFABCPara-OlimpíadaPróteses <strong>esportivas</strong>• Primeira vez: 1960 em Roma, Itália• Após a segunda guerra• Esporte como parte do programa de reabilitação• Atletas com deficiências de mobilidade Amputações Cegueira Paralisia cerebral• Classificação dos atletas pelo aspecto funcional,específica para cada esporte147
Para-OlimpíadaModalidadesEsqui alpino15<strong>Engenharia</strong> Biomédica - UFABCModalidadesAtletismoPara-Olimpíada168
Para-OlimpíadaModalidadesAtletismo17<strong>Engenharia</strong> Biomédica - UFABCModalidadesAtletismoPara-Olimpíada189
Para-OlimpíadaModalidadesBiatlon• Resistência física + Acurácia no tiro19<strong>Engenharia</strong> Biomédica - UFABCModalidadesHockey sobre geloPara-Olimpíada2010
Para-OlimpíadaModalidadesNatação21<strong>Engenharia</strong> Biomédica - UFABCModalidadesPara-OlimpíadaDança esportiva sobre rodas2211
Para-OlimpíadaModalidadesBocha23<strong>Engenharia</strong> Biomédica - UFABCModalidadesFutebol de cincoPara-Olimpíada2412
Para-OlimpíadaModalidadesGolbol• Arremesso de bola contra o gol adversário• 3 X 3 (todos de olhos vendados)25<strong>Engenharia</strong> Biomédica - UFABCPara-OlimpíadaModalidadesCiclismo• Atletas com deficiência visual, paralisia cerebral, etcBicicleta em tandem2613
Para-OlimpíadaModalidadesRugby27<strong>Engenharia</strong> Biomédica - UFABCBibliografia• WEIR, R.F. and SENSINGER, J.W. The Design of artificial arms andhands for prosthetic applications. In: KUTZ, M. BiomedicalEngineering and Design Handbook. 2ed. McGraw-Hill Professional.2009. p.537 - 598• BUNING, M.E., RICE, I.M., COOPER, R.E., and FITZGERALD, G.Adaptive sports and recreation technology. In: COOPER, R.A.;OHNABE, H.; HOBSON, D.A. An Introduction to RehabilitationEngineering. Series in Medical Physics and Biomedical Engineering.Boca Raton: Taylor&Francis, 2007. p.385 – 4122814