3. Metoda deplasÄrilor pentru structuri din bare drepte
3. Metoda deplasÄrilor pentru structuri din bare drepte
3. Metoda deplasÄrilor pentru structuri din bare drepte

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2 .<br />
METODA DEPLASĂRILOR<br />
PENTRU STRUCTURI DIN BARE DREPTE<br />
În construcţiile civile, ca şi în cele de maşini, se întâlnesc<br />
numeroase poduri, acoperişuri, dispozitive, instalaţii, “schelete” ale<br />
unor maşini etc care sunt realizate <strong>din</strong> <strong>bare</strong> <strong>drepte</strong> sau curbe.<br />
Materialele folosite sunt, mai ales, ţevi sau profile laminate,<br />
asamblate, de regulă, prin sudură. Configuraţiile acestor <strong>structuri</strong> pot<br />
fi plane sau spaţiale, mai simple sau mai complexe, formate <strong>din</strong><br />
câteva <strong>bare</strong> sau având mii de componente. Calculul lor se poate face<br />
foarte eficient cu metoda deplasărilor, formulată <strong>pentru</strong> <strong>structuri</strong> <strong>din</strong><br />
<strong>bare</strong> <strong>drepte</strong>. Această metodă prezintă interes metodologic şi didactic<br />
deoarece, <strong>pentru</strong> prima dată, la formularea ei s-a introdus conceptul<br />
de matrice de rigiditate, care s-a dovedit deosebit de rodnic. De<br />
asemenea, această metodă este “precursoarea” metodei elementelor<br />
finite, cea mai utilizată metodă de calcul ingineresc, în prezent, care,<br />
este şi ea considerată frecvent, ca o metodă a deplasărilor.<br />
2.1. Formularea metodei<br />
În metoda deplasărilor, necunoscute se consideră deplasările<br />
nodurilor <strong>structuri</strong>i. Formularea matriceală a metodei duce la<br />
utilizarea unor notaţii simple şi unitare, la o mai clară sistematizare şi<br />
etapizare a calculelor şi – mai ales – la simplitatea elaborării unui<br />
program şi a implementării lui pe calculator. <strong>Metoda</strong> se utilizează,<br />
exclusiv, pe calculator, cu programe corespunzătoare, datorită<br />
volumului imens al calculelor.<br />
Structura se consideră schematizată ca o reţea spaţială (în cazuri<br />
particulare, reţeaua poate fi plană) de <strong>bare</strong> <strong>drepte</strong> legate între ele în<br />
noduri. Configuraţia geometrică a <strong>structuri</strong>i se defineşte prin valorile<br />
coordonatelor nodurilor în raport cu un sistem de referinţă global,<br />
cartezian, drept - reper global - ataşat <strong>structuri</strong>i. Barele <strong>structuri</strong>i se<br />
definesc prin nodurile de la capete. Fiecare nod poate avea maximum<br />
62
şase componente ale deplasării: trei componente ale deplasării<br />
lineare şi trei rotiri, definite în raport cu reperul global, al <strong>structuri</strong>i.<br />
Direcţiile după care se pot produce deplasări se numesc grade de<br />
libertate geometrică (degrees of freedom – DOF). Pentru unele<br />
noduri, una sau mai multe componente ale deplasării pot fi<br />
împiedicate, sau blocate (adică au valori nule), dacă nodul respectiv<br />
este reazem. În unele noduri se pot introduce deplasări cu valori<br />
impuse, cunoscute.<br />
Observaţie: În teoria elasticităţii se definesc doar componentele, u, v, w, ale<br />
deplasării liniare. Introducerea şi a rotirilor drept componente ale deplasării, este o<br />
“generalizare inginerească”, a conceptelor, riguroase, ale teoriei elasticităţii, <strong>din</strong><br />
considerente privind unele facilităţi de calcul. Ansamblul deplasărilor liniare şi<br />
rotirilor poartă denumirea de “deplasări generalizate”. De asemenea, eforturile<br />
(forţe şi momente) <strong>din</strong> secţiunile <strong>bare</strong>lor se numesc “forţe generalizate”.<br />
Sarcinile concentrate, forţe şi momente, se consideră aplicate<br />
numai în noduri. Această restricţie este doar metodologică, <strong>pentru</strong> o<br />
formulare mai simplă şi mai accesibilă a metodei. Programele de<br />
calcul au implementate proceduri care permit definirea a două<br />
categorii de sarcini:<br />
- sarcini aplicate <strong>structuri</strong>i, în noduri, care pot fi forţe şi<br />
momente concentrate, definite în raport cu reperul global OXYZ;<br />
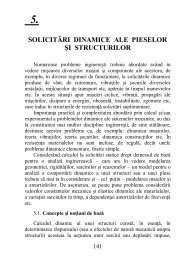
- sarcini aplicate fiecărei <strong>bare</strong>, între nodurile de la capete, care<br />
pot fi de orice tip, concentrate sau distribuite, definite în raport cu un<br />
reper local ox o y o z o , ataşat fiecărei <strong>bare</strong>, ca în figura 2.1.<br />
Figura 2.1<br />
63
Pentru un nod oarecare, i, se definesc vectorul deplasărilor<br />
nodale, {u i } şi vectorul sarcinilor nodale, {R i }, sub forma (2.1), care,<br />
în cazul cel mai general, au câte 6 componente.<br />
Numărul total<br />
u1<br />
<br />
R1<br />
<br />
al deplasărilor<br />
<br />
<br />
u<br />
<br />
2 <br />
<br />
R 2 <br />
necunoscute <strong>pentru</strong><br />
u3<br />
<br />
R<br />
3<br />
<br />
întreaga structură, u i<br />
, R i<br />
. (2.1)<br />
reprezintă numărul<br />
total al gradelor de<br />
libertate geometrică<br />
ale <strong>structuri</strong>i.<br />
u<br />
u<br />
<br />
u<br />
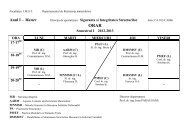
O bară oarecare, definită de nodurile n 1 şi n 2 , având lungimea l,<br />
se consideră raportată la un sistem de coordonate local, x 0 y 0 z 0 , care<br />
conţine direcţiile principale de inerţie ale secţiunii <strong>bare</strong>i, ca în figura<br />
2.2, în care s-au figurat sensurile pozitive ale deplasărilor şi<br />
eforturilor la cele două capete ale <strong>bare</strong>i. În figura 2.2 s-au scris şi<br />
notaţiile obişnuite <strong>din</strong> rezistenţa materialelor <strong>pentru</strong> componentele<br />
vectorilor {u} şi {R}. De obicei, <strong>pentru</strong> fiecare bară se utilizează şi<br />
un nod n 3 , <strong>pentru</strong> a defini direcţia planului x 0 y 0 în spaţiu (care este<br />
plan de inerţie principal al secţiunii <strong>bare</strong>i respective).<br />
4<br />
5<br />
6<br />
<br />
<br />
<br />
<br />
R<br />
R<br />
<br />
R<br />
4<br />
5<br />
6<br />
<br />
<br />
<br />
<br />
a<br />
Figura 2.2<br />
Cele 12 componente ale deplasărilor capetelor <strong>bare</strong>i sunt<br />
independente, dar <strong>din</strong> cele 12 eforturi care acţionează asupra <strong>bare</strong>i,<br />
numai şase sunt independente, deoarece trebuie satisfăcute ecuaţiile<br />
de echilibru, în număr de şase:<br />
N 1 + N 2 = 0 ; T T 0 ; T T 0; M M 0 ;<br />
y<br />
1 y 2<br />
M iy1 iy2<br />
z 1<br />
64<br />
z1 z 2<br />
x<br />
b<br />
1 x 2<br />
M T 0 ; M M T 0.<br />
iz1 iz 2 y1<br />
(2.2)
2.2. Matricea de rigiditate a <strong>bare</strong>i <strong>drepte</strong><br />
Între deplasări şi eforturi există relaţiile de dependenţă,<br />
cunoscute <strong>din</strong> rezistenţa materialelor. Pentru bara considerată, aceste<br />
relaţii pot fi scrise condensat sub forma<br />
EA<br />
<br />
<br />
<br />
<br />
<br />
<br />
R<br />
1 <br />
<br />
R<br />
<br />
2<br />
S<br />
R<br />
<br />
3 <br />
<br />
<br />
R<br />
4<br />
<br />
R<br />
<br />
5<br />
<br />
<br />
R<br />
6<br />
<br />
R<br />
<br />
<br />
7<br />
<br />
<br />
R<br />
8<br />
<br />
<br />
R<br />
<br />
<br />
9<br />
<br />
<br />
R<br />
10<br />
<br />
<br />
R<br />
<br />
<br />
11<br />
<br />
<br />
R<br />
12<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
0<br />
12EI<br />
3<br />
<br />
I<br />
z<br />
0<br />
0<br />
12EI<br />
3<br />
<br />
M<br />
y<br />
0<br />
0<br />
0<br />
GI<br />
<br />
E<br />
r<br />
0<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
4EI<br />
<br />
T<br />
y<br />
y<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
0<br />
0<br />
4EI<br />
<br />
R<br />
z<br />
z<br />
EA<br />
<br />
0<br />
0<br />
0<br />
0<br />
0<br />
EA<br />
<br />
I<br />
0<br />
12EI<br />
3<br />
<br />
0<br />
0<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
12EI<br />
3<br />
<br />
C<br />
z<br />
z<br />
z<br />
0<br />
0<br />
12EI<br />
3<br />
<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
0<br />
0<br />
12EI<br />
3<br />
<br />
y<br />
y<br />
y<br />
0<br />
0<br />
0<br />
GI<br />
<br />
0<br />
0<br />
0<br />
0<br />
0<br />
GI<br />
<br />
r<br />
r<br />
0<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
2EI<br />
<br />
0<br />
0<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
4EI<br />
<br />
y<br />
y<br />
y<br />
y<br />
0<br />
6EI<br />
2<br />
<br />
0<br />
0<br />
0<br />
2EI<br />
<br />
0<br />
z<br />
z<br />
6EI<br />
2<br />
<br />
0<br />
0<br />
0<br />
4EI<br />
<br />
z<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
u<br />
1 <br />
<br />
u<br />
<br />
2<br />
<br />
u<br />
<br />
3<br />
<br />
<br />
u<br />
4<br />
<br />
u<br />
<br />
5<br />
<br />
u<br />
6<br />
<br />
<br />
<br />
u<br />
7 <br />
<br />
<br />
<br />
u<br />
8<br />
<br />
z <br />
u<br />
9 <br />
<br />
<br />
u<br />
10<br />
<br />
<br />
u<br />
11<br />
<br />
<br />
u<br />
12<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
sau şi mai simplu<br />
{R} = [k]{u}, (2.4)<br />
în care [k] este matricea de rigiditate a <strong>bare</strong>i.<br />
Proprietăţile matricei de rigiditate a <strong>bare</strong>i <strong>drepte</strong>.<br />
- Rigiditatea unei <strong>bare</strong> <strong>drepte</strong> este definită de o matrice pătrată,<br />
[k], care leagă cele 12 eforturi, {R}, de cele 12 deplasări, {u},<br />
corespunzătoare celor 12 grade de libertate geometrică ale celor două<br />
noduri de la capetele <strong>bare</strong>i.<br />
Observaţie: Aceasta este situaţia cea mai generală. În practică se<br />
întâlnesc numeroase cazuri particulare, ca, de exemplu, cele în care<br />
<strong>bare</strong>le sunt articulate şi deci nu pot prelua decât eforturi axiale şi /<br />
sau structura este plană. În aceste cazuri numărul componentelor<br />
vectorilor {R} şi {u} precum şi dimensiunile matricei [k] vor fi mai<br />
mici decât 12. Numărul minim al componentelor vectorilor {R} şi<br />
{u} este 1, iar dimensiunea minimă a matricei [k] este 2x2.<br />
65
i<br />
Gradul de libertate <strong>pentru</strong> care<br />
u i = 1<br />
la capătul <strong>bare</strong>i, <strong>pentru</strong><br />
X 0 = 0<br />
Tabelul 2.1<br />
i<br />
Gradul de libertate <strong>pentru</strong> care<br />
u i = 1<br />
la capătul <strong>bare</strong>i, <strong>pentru</strong><br />
X 0 = l<br />
i =1 i = 7<br />
i =2 i = 8<br />
i =3 i = 9<br />
i =4 i =10<br />
i =5 i =11<br />
i =6 i =12<br />
- Un element oarecare, k ij , al matricei de rigiditate, [k], de pe<br />
linia i şi coloana j, are următoarea semnificaţie: este efortul R i ,<br />
produs de o deplasare u i = 1, celelalte deplasări fiind nule. Expresiile<br />
analitice de calcul ale elementelor matricei [k] se stabilesc cu<br />
66
metodele clasice <strong>pentru</strong> calculul deplasărilor <strong>bare</strong>lor <strong>din</strong> rezistenţa<br />
materialelor, ca, de exemplu, metoda „parametrilor iniţiali”, sau o<br />
metodă energetică.<br />
- Pentru a defini mai clar semnificaţiile elementelor k ij ale<br />
matricei de rigiditate a <strong>bare</strong>i, în tabelul 2.1 se prezintă schemele de<br />
solicitare ale <strong>bare</strong>i, <strong>pentru</strong> cele 12 componente, u i = 1, ale deplasării<br />
şi cele 12 componente, R i , ale eforturilor produse în aceste condiţii.<br />
- Matricea [k] este simetrică, adică k ij = k ji , ca urmare a teoremei<br />
reciprocităţii forţelor.<br />
- De asemenea, matricea [k] este singulară, rangul ei fiind - în<br />
cazul cel mai general - 6, deoarece bara poate avea şase deplasări de<br />
corp rigid, acestea fiind fără efect asupra valorilor eforturilor. Deci<br />
matricea nu poate fi inversată, aceasta şi datorită faptului că ea<br />
„leagă” 12 deplasări independente de 12 eforturi, între care există<br />
cele şase relaţii (2.2), adică numai şase eforturi sunt independente.<br />
Un alt mod de a privi această situaţie se referă la sistemul de ecuaţii<br />
(2.4), care nu poate fi rezolvat, fiind nedeterminat, ceea ce presupune<br />
că o singură bară nu poate fi rezolvată (cel puţin în contextul<br />
prezent).<br />
- Matricea [k] este pozitiv definită, deoarece toate elementele, k ii<br />
, de pe diagonala principală sunt „strict pozitive”, adică ele nu pot fi<br />
niciodată negative sau nule. Această proprietate este o consecinţă a<br />
faptului că deplasarea u i = 1 produce totdeauna un efort R i , cu<br />
acelaşi sens şi pe aceeaşi direcţie cu u i .<br />
Transformarea matricei de rigiditate.<br />
Relaţia (2.4) a fost scrisă <strong>pentru</strong> o bară oarecare a <strong>structuri</strong>i,<br />
raportată la reperul local ox o y o z o . Dacă structura este raportată la<br />
reperul global OXYZ, atunci între cele două sisteme de coordonate<br />
există relaţiile<br />
x0<br />
l11<br />
l12<br />
l13<br />
X<br />
<br />
y0<br />
<br />
<br />
l21<br />
l22<br />
l23<br />
Y, sau {x 0 } = [L 1 ] {X}, (2.5)<br />
<br />
z0<br />
l31<br />
l32<br />
l33<br />
Z<br />
<br />
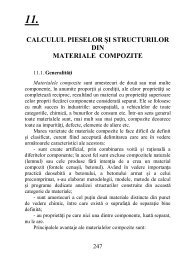
în care [L 1 ], este matricea cosinusurilor directoare ale direcţiilor ox o ,<br />
oy o , oz o , în raport cu direcţiile OX, OY, OZ (fig. 2.3), adică l 11 = cos<br />
α 1 , l 12 = cos β 1 , l 13 = cos γ 1 , ş.a.m.d.<br />
67
Figura 2.3<br />
[L], de 12x12<br />
Dacă se are în vedere că ambele sisteme de<br />
coordonate sunt ortogonale, rezultă că există<br />
relaţia [L 1 ] T [L 1 ] = [I], în care, [I], este<br />
matricea unitate de or<strong>din</strong>ul trei.<br />
Pentru întreaga bară, vectorii {R} şi {u} şi<br />
matricea [k] au câte 12 componente, deci<br />
trebuie definită o „matricea de transformare”,<br />
<br />
L1<br />
0 0 0 <br />
<br />
<br />
0 L1<br />
0 0<br />
L <br />
, (2.6)<br />
0 0 L1<br />
0<br />
<br />
0 0 0 L<br />
1 <br />
în care [0] este matricea zero de or<strong>din</strong>ul trei.<br />
Calculul deplasărilor şi eforturilor în sistemul local de<br />
coordonate (mărimile definite în sistemul local vor avea indicele 0)<br />
în funcţie de valorile lor <strong>din</strong> sistemul global, se face cu relaţiile<br />
{u 0 } = [L]{u}, {R 0 } = [L]{R}. (2.7)<br />
Ca urmare a notaţiei adoptate, relaţia (2.4) trebuie scrisă sub<br />
forma {R 0 } = [k 0 ]{u 0 }, care devine, înlocuind relaţiile de<br />
transformare (2.7),<br />
[L]{R} = [k 0 ] [L] {u}. (2.8)<br />
Deoarece [L] -1 = [L] T , însemnă că relaţia (2.8) devine<br />
{R} = [L] T [k 0 ] [L] {u}, (2.9)<br />
în care se notează<br />
[k] = [L] T [k 0 ] [L], (2.10)<br />
relaţie ce permite calculul matricei [k] în sistemul de coordonate<br />
global, funcţie de matricea [k 0 ], <strong>din</strong> sistemul local, operaţie ce se<br />
numeşte uzual “rotirea matricei de rigiditate” sau “transformarea<br />
matricei de rigiditate”. Acesta este efectul rotirii sistemului de<br />
coordonate asupra matricei de rigiditate a <strong>bare</strong>i. Translaţiile nu au<br />
nici un efect asupra matricei [k]. În acest mod, se obţine o relaţie<br />
similară cu (2.4), <strong>pentru</strong> bara raportată la reperul global, al <strong>structuri</strong>i.<br />
Observaţie: Nu este necesar să se introducă notaţii speciale<br />
<strong>pentru</strong> mărimile <strong>din</strong> cele două sisteme de coordonate, deoarece<br />
rezultă <strong>din</strong> context la care sistem se face referire la un moment dat.<br />
68
2.<strong>3.</strong> Asamblarea. Matricea de rigiditate a <strong>structuri</strong>i<br />
Pentru calculul întregii <strong>structuri</strong>i, care se consideră că are n n<br />
noduri şi n b <strong>bare</strong>, metoda deplasărilor presupune că se poate scrie o<br />
relaţie similară cu (2.4), <strong>pentru</strong> întreaga structură, raportată la un<br />
reper global OXYZ şi anume<br />
{R} = [K]{u}, (2.11)<br />
în care: [K] este matricea de rigiditate a <strong>structuri</strong>i, {R} – vectorul<br />
sarcinilor <strong>din</strong> noduri (nodale), {u} – vectorul deplasărilor nodurilor<br />
(nodale), ale <strong>structuri</strong>i.<br />
Matricea de rigiditate, [K], se obţine prin „expandarea” şi<br />
însumarea algebrică a matricelor de rigiditate ale <strong>bare</strong>lor (calculate în<br />
raport cu reperul global), pe nodurile şi gradele de libertate ale<br />
acestora, definite <strong>pentru</strong> întreaga structură. Această operaţie poartă<br />
denumirea de asamblare.<br />
Figura 2.4<br />
În figura 2.4 se prezintă modul în care matricea de rigiditate,<br />
[k], a unei <strong>bare</strong>, definită între nodurile i şi j, poate fi descompusă în<br />
patru submatrice [k ii ], [k ij ], [k ji ], [k jj ], corespunzătore gradelor de<br />
libertate geometrică (DOF) ale nodurilor de la capetele <strong>bare</strong>i. Aceste<br />
matrice sunt pătrate ( [k ii ], [k jj ] ) sau dreptunghiulare ( [k ij ] = [k ji ] T –<br />
când numerele DOF-urilor nodurilor de la capetele <strong>bare</strong>i nu sunt<br />
egale) şi au dimensiunile egale cu numerele DOF ale nodurilor la<br />
care se referă, adică între 1 şi 6.<br />
Pentru obţinerea matricei de rigiditate [K] a <strong>structuri</strong>i se<br />
procedează astfel:<br />
- se numerotează, succesiv, toate cele n n noduri ale <strong>structuri</strong>i;<br />
69
- se determină numărul N, al DOF-urilor <strong>pentru</strong> întreaga<br />
structură, care este suma DOF ale tuturor nodurilor (de regulă, toate<br />
nodurile <strong>structuri</strong>i au aceleaşi DOF, dar este posibil ca acestea să fie<br />
diferite, <strong>pentru</strong> diverse noduri);<br />
- se defineşte matricea [K], pătrată, cu dimensiunile NxN,<br />
considerându-se că succesiunea coloanelor şi a liniilor este cea a<br />
nodurilor, iar <strong>pentru</strong> fiecare nod este cea a DOF, ca în vectorii (2.1),<br />
deoarece matricea este simetrică;<br />
- matricea [K] se iniţializează<br />
(se “umple”) cu valoarea 0;<br />
- se “expandează” matricea de<br />
rigiditate a fiecărei <strong>bare</strong> (care a fost<br />
Figura 2.5<br />
calculată în raport cu reperul<br />
global), ca în schema <strong>din</strong> figura 2.4,<br />
însumându-se algebric valorile<br />
elementelor submatricelor cu<br />
valorile aflate deja în matricea<br />
[K],<br />
în locaţiile corespunzătore fiecărui DOF;<br />
- procedura se continuă până când se procesează matricele de<br />
rigiditate ale tuturor celor n b <strong>bare</strong> ale <strong>structuri</strong>i.<br />
În figura 2.5 se prezintă, ca exemplu, o structură relativ simplă,<br />
cu 5 noduri (n n = 5) şi 7 <strong>bare</strong> (n b = 7), a cărei matrice de rigiditate are<br />
configuraţia <strong>din</strong> figura 2.6. În această figură trebuie remarcat modul<br />
70
Figura 2.6<br />
în care s-au “expandat” submatricele <strong>bare</strong>lor în matricea [K] a<br />
<strong>structuri</strong>i. Notaţia folosită <strong>pentru</strong> o submatrice [k b ij] are următoarea<br />
semnificaţie: b este numărul <strong>bare</strong>i, iar i şi j sunt numerele nodurilor<br />
de la capetele <strong>bare</strong>i respective. Dacă într-o locaţie se află mai multe<br />
submatrice, aceasta înseamnă că elementele lor se însumează<br />
algebric, după aceleaşi DOF-uri, corespunzătore nodurilor la care se<br />
referă.<br />
Proprietăţile matricei de rigiditate, [K], a <strong>structuri</strong>i sunt aceleaşi<br />
ca ale matricei de rigiditate a unei <strong>bare</strong>, la care se mai adaugă şi<br />
altele câteva.<br />
- Matricea este pătrată, cu dimensiunile NxN, în care N este<br />
numărul total al DOF-urilor nodurilor întregii <strong>structuri</strong>.<br />
- Un element oarecare, k ij , al matricei de rigiditate, [K], de pe<br />
linia i şi coloana j, are următoarea semnificaţie: este efortul R i ,<br />
produs de o deplasare u i = 1, celelalte deplasări ale <strong>structuri</strong>i fiind<br />
nule.<br />
- Matricea [K] este simetrică, adică k ij = k ji .<br />
- Matricea este singulară, gradul de nedeterminare fiind egal cu<br />
numărul deplasărilor de corp rigid pe care le poate avea structura în<br />
ansamblu (în cazul cel mai general 6, deoarece structura poate avea<br />
şase deplasări de corp rigid). Deci matricea nu poate fi inversată. Un<br />
alt mod de a privi această situaţie se referă la sistemul de ecuaţii<br />
(2.11), care, în aceste condiţii, nu poate fi rezolvat, fiind<br />
nedeterminat.<br />
- Matricea [K] este pozitiv definită, deoarece toate elementele, k ii ,<br />
de pe diagonala principală sunt „strict pozitive”, adică ele nu pot fi<br />
niciodată negative sau nule.<br />
- Matricea este rară, adică un număr relativ mare de elemente<br />
„rămân” nule (în mod obişnuit între 60 şi 85 % <strong>din</strong> totalul<br />
elementelor matricei).<br />
- Matricea este „bandă”, adică elementele nenule sunt grupate în<br />
jurul diagonalei principale.<br />
Observaţie: Ultimele două proprietăţi ale matricei [K] nu sunt evidente în<br />
figura 2.6 deoarece structura căreia în corespunde (fig. 2.5) are un număr prea mic<br />
de noduri.<br />
Componentele vectorului sarcinilor nodale, {R} au aceeaşi<br />
succesiune ca şi elementele unei coloane a matricei de rigiditate a<br />
71
<strong>structuri</strong>i, [K]. Pentru structura <strong>din</strong> figura 2.5, componenta R 3 2 = -P,<br />
este plasată în locaţia corespunzătore DOF=2, a nodului 3 (relaţia<br />
(2.1)), aşa cum rezultă <strong>din</strong> figura 2.5. Celelalte componente ale<br />
vectorului {R} sunt nule.<br />
2.4. Introducerea condiţiilor de rezemare<br />
Pentru ca sistemul de ecuaţii (2.11) să poată fi rezolvat, trebuie<br />
ca structura să nu aibă deplasări de corp rigid (translaţii sau rotiri) în<br />
spaţiu. În acest scop trebuie introduse condiţiile în “legături” (de<br />
rezemare) ale <strong>structuri</strong>i, care înseamnă, de fapt, deplasări cunoscute<br />
(nule sau de valoare dată), într-un număr oarecare de noduri. Aceste<br />
legături pot fi oricâte, structura putând fi static determinată sau static<br />
nedeterminată, adică metoda nu face o astfel de distincţie. Prin<br />
urmare, în sistemul de ecuaţii (2.11) se elimină liniile şi coloanele<br />
corespunzătoare deplasărilor cunoscute (se are în vedere că fiecare<br />
linie corespunde unui anumit DOF, al unui anumit nod), obţinânduse<br />
un sistem de ecuaţii algebrice compatibil şi determinat, care se<br />
poate rezolva prin diverse metode numerice.<br />
2.5. Rezolvarea sistemului de ecuaţii<br />
Alegerea metodei de rezolvare a sistemului (2.11) trebuie să aibă<br />
în vedere cel puţin următoarele aspecte:<br />
- Într-un program de calcul destinat analizei unei <strong>structuri</strong> <strong>din</strong><br />
<strong>bare</strong> <strong>drepte</strong> folosind metoda deplasărilor, rezolvarea sistemului (2.11)<br />
este etapa cea mai importantă sub aspectul volumului de calcul, al<br />
preciziei rezultatelor obţinute şi al performanţelor programului, în<br />
ansamblu.<br />
- Numărul de ecuaţii al sistemului poate fi foarte mare, adică de<br />
or<strong>din</strong>ul miilor sau sutelor de mii, ceea ce înseamnă că, în general,<br />
sistemul nu poate fi rezolvat în memoria de lucru a calculatorului ci<br />
trebuie “partiţionat” adică descompus în blocuri sau subsisteme.<br />
- Sistemul este simetric, bandă (cu lăţimea variabilă a benzii) şi<br />
rar.<br />
Programele care se utilizează în inginerie au implementate<br />
module <strong>pentru</strong> rezolvarea sistemului (2.11) bazate pe următoarele<br />
metode şi algoritmi (detalii în manualele algebră şi metode numerice de<br />
72
calcul): metoda orizontului (sky – line), metoda matricelor rare<br />
(sparse), metode iterative.<br />
Metodele enumerate conţin tehnici de rearanjare a ecuaţiilor, de<br />
eliminare, triunghiularizare Gauss sau descompunere. În algoritmii<br />
implementaţi în programe, foarte importante sunt procedurile care<br />
asigură neefectuarea operaţiilor aritmetice cu zero, deoarece acestea<br />
sunt „majoritare” şi pot irosi efortul de calcul. Metodele iterative sunt<br />
destinate rezolvării sistemelor cu peste 200000 de ecuaţii şi au scopul<br />
asigurării, în aceste condiţii, a unei precizii bune a soluţiei.<br />
2.6. Rezultatele calculului<br />
- Prin rezolvarea sistemului (2.11) se obţin valorile deplasărilor<br />
nodale, {u}, în raport cu reperul global (al <strong>structuri</strong>i).<br />
- În ecuaţiile <strong>din</strong> sistemul {R} = [K]{u}, corespunzătoare<br />
gradelor de libertate blocate ({u}=0) sau cu deplasări cunoscute<br />
(date), se înlocuiesc valorile deplasărilor, {u} şi se obţin valorile,<br />
{R}, ale reacţiunilor respective, în raport cu reperul global.<br />
Observaţie. O linie <strong>din</strong> sistemul {R} = [K]{u} este ecuaţia de echilibru a<br />
forţelor generalizate <strong>din</strong> nodul şi pe direcţia DOF-ului respectiv.<br />
- Cu relaţiile (2.7) se pot determina deplasările nodale, {u 0 } şi<br />
eforturile nodale {R 0 }, în raport cu reperul local (al <strong>bare</strong>i).<br />
- Cu relaţia {R 0 } = [k 0 ]{u 0 } se pot calcula eforturile care<br />
acţionează la capetele fiecărei <strong>bare</strong> (fig. 2.2.b) cu care se pot calcula<br />
(folosind formulele şi metodologiile <strong>pentru</strong> solicitări simple şi<br />
compuse), tensiunile produse de solicitările simple <strong>din</strong> <strong>bare</strong>,<br />
tensiunile echivalente maxime şi deplasările <strong>din</strong> fiecare secţiune a<br />
fiecărei <strong>bare</strong>.<br />
- De asemenea, se oferă informaţii privind greutatea totală a<br />
<strong>structuri</strong>i, poziţia centrului de greutate, condiţiile în care s-a rezolvat<br />
sistemul de ecuaţii etc.<br />
2.7. Etapele principale ale calculului unei <strong>structuri</strong> <strong>din</strong> <strong>bare</strong><br />
<strong>drepte</strong> cu metoda deplasărilor<br />
Preprocesarea.<br />
- Se elaborează modelul „conceptual” de calcul, adică se<br />
stabilesc care sunt <strong>bare</strong>le care se iau în considerare (şi care nu),<br />
condiţiile de încărcare (eventuale variante) şi condiţiile de rezemare.<br />
73
- Se numerotează nodurile şi se determină coordonatele lor în<br />
raport cu un reper global al <strong>structuri</strong>i, convenabil ales.<br />
- Se numerotează <strong>bare</strong>le şi se defineşte axa fiecărei <strong>bare</strong>, prin<br />
numerele nodurilor de la capete. Folosind un alt nod (care să nu fie<br />
pe direcţia axei <strong>bare</strong>i) se defineşte direcţia principală de inerţie oy o a<br />
secţiunii.<br />
- Se definesc formele geometrice şi dimensiunile secţiunilor<br />
<strong>bare</strong>lor şi se calculează ariile şi momentele de inerţie principale,<br />
direcţiile principale de inerţie şi momentul de inerţie polar (sau cel<br />
convenţional la răsucire).<br />
- Se definesc sarcinile aplicate în nodurile <strong>structuri</strong>i şi sarcinile<br />
aplicate <strong>bare</strong>lor.<br />
- Se definesc constantele materialului: greutatea volumică γ,<br />
modulele de elasticitate E şi G, coeficientul de contracţie transversală<br />
υ, coeficientul de dilatare termică lineară α etc.<br />
- Se definesc condiţiile de rezemare (legături) ale <strong>structuri</strong>i.<br />
Aceste operaţii se execută de utilizator, cu sau fără ajutorul<br />
calculatorului şi au ca rezultat obţinerea unui fişier „de intrare” care<br />
conţine toate informaţiile care definesc modelul de calcul al<br />
<strong>structuri</strong>i, în forma cerută de programul care se utilizează.<br />
Calculatorul citeşte fişierul de intrare şi face o serie de verificări<br />
ale acestuia (dacă se găsesc greşeli, se scriu mesaje de atenţionare).<br />
De asemenea, se realizează un desen în spaţiu al modelului, cu<br />
reprezentarea încărcărilor şi condiţiilor de rezemare, care permite alte<br />
verificări ale modelului.<br />
Procesarea.<br />
Prin comenzi specifice se activează procesul propriu-zis de<br />
calcul, în varianta aleasă de utilizator (programul are opţiuni<br />
corespunzătoare) parcurgându-se, de obicei, următoarele etape:<br />
- Se calculează matricele de rigiditate, [k 0 ], ale <strong>bare</strong>lor în raport<br />
cu reperul local (vezi relaţia (2.3)).<br />
- Se calculează matricele de rigiditate ale <strong>bare</strong>lor, [k], în raport<br />
cu reperul global, cu relaţia (2.10).<br />
- Se determină matricea de rigiditate, [K], a <strong>structuri</strong>i, prin<br />
asamblarea matricelor de rigiditate ale <strong>bare</strong>lor.<br />
- Se formează vectorul, {R}, al sarcinilor nodale ale <strong>structuri</strong>i.<br />
74
- Se formează sistemul de ecuaţii (2.11) al <strong>structuri</strong>i.<br />
- În sistemul (2.11) se introduc condiţiile de rezemare, prin<br />
eliminarea liniilor şi coloanelor corespunzătoare gradelor de libertate<br />
geometrică blocate (u = 0) sau cu deplasări impuse (cunoscute).<br />
- Se rezolvă sistemul de ecuaţii al <strong>structuri</strong>i, obţinându-se<br />
valorile deplasărilor nodale, {u}.<br />
- Se scriu, într-o formă accesibilă toate informaţiile privind<br />
modelul de calcul şi rezultatele obţinute.<br />
Postprocesarea.<br />
Volumul informaţiilor disponibile în urma calculului este foarte<br />
mare, motiv <strong>pentru</strong> care programul oferă utilizatorului posibilitatea<br />
de a alege ce informaţii doreşte să i se „livreze” şi sub ce formă. În<br />
programe sunt disponibile „meniuri” cu care se pot alege variantele<br />
postprocesării. Se au în vedere două categorii de aspecte:<br />
- Care sunt informaţiile dorite: deplasări, eforturi, tensiuni,<br />
reacţiuni, deformaţii specifice, tensiuni echivalente etc. Aceste<br />
mărimi pot fi definite în raport cu reperul global (al <strong>structuri</strong>i), în<br />
raport cu reperul local (al <strong>bare</strong>i), sau, <strong>pentru</strong> unele <strong>din</strong>tre ele,<br />
utilizatorul poate alege, varianta dorită.<br />
- Sub ce formă să fie „editate” rezultatele solicitate: tabele,<br />
figuri, reprezentări grafice, animaţii, valori maxime etc, fiecare <strong>din</strong><br />
opţiuni având diverse variante disponibile.<br />
2.8. Concluzii<br />
- <strong>Metoda</strong> deplasărilor <strong>pentru</strong> calculul <strong>structuri</strong>lor <strong>din</strong> <strong>bare</strong> <strong>drepte</strong><br />
este foarte eficientă în inginerie, motiv <strong>pentru</strong> care este folosită pe<br />
scară foarte largă, mai ales datorită simplităţii sale şi a utilizării<br />
calculatoarelor, fiind implementată în sisteme de „proiectare<br />
asistată”.<br />
- Din considerente didactice metoda a fost prezentată în varianta<br />
sa de bază. Ea poate fi, relativ simplu, extinsă atât <strong>pentru</strong> <strong>structuri</strong><br />
care conţin şi <strong>bare</strong> curbe, cât şi <strong>pentru</strong> calcule de stabilitate, <strong>din</strong>amice<br />
(în diverse variante) sau <strong>pentru</strong> probleme nelineare.<br />
- <strong>Metoda</strong> este „mai exactă” ca altele, ca, de exemplu, metoda<br />
elementelor finite. Greşit se consideră, de către unii utilizatori, ca<br />
fiind exactă. <strong>Metoda</strong>, în formularea sa de bază, conţine ipoteza de<br />
75
ară, care este o simplificare a realităţii. În consecinţă soluţiile au un<br />
anumit grad de aproximare, de care trebuie să se ţină seama în<br />
practică. Ipoteza de bară (şi ipoteza secţiunii plane a lui Bernoulli),<br />
presupune că lungimea fiecărei <strong>bare</strong> este mult mai mare decât<br />
dimensiunile secţiunii şi ca urmare, structura se consideră definită<br />
prin axele <strong>bare</strong>lor, iar joncţiunile <strong>bare</strong>lor (nodurile <strong>structuri</strong>i) ca<br />
puncte geometrice (fără dimensiuni). Prin urmare, metoda nu poate<br />
oferi informaţii satisfăcătoare privind valorile tensiunilor în zonele<br />
joncţiunilor <strong>structuri</strong>i, ci numai la distanţe suficient de mari de<br />
acestea. Valorile mărimilor care definesc comportarea „globală” a<br />
<strong>structuri</strong>i se obţin cu o precizie „inginerească” bună. Aspectele<br />
„locale” trebuie analizate ulterior, cu modele şi metode de calcul<br />
adecvate, ca, de exemplu, metoda elementelor finite.<br />
Bibliografie<br />
1. Constantinescu, I.N., Gheorghiu, H., Hadăr, A., Stoicescu, C.,<br />
Méthode des éléments finis- Cours et applications, Lytographie de<br />
l'Université "Politehnica" de Bucarest, 199<strong>3.</strong><br />
2. Constantinescu, I.N., Picu, C., Hadăr, A., Gheorghiu, H.,<br />
Rezistenţa materialelor <strong>pentru</strong> ingineria mecanică, Editura BREN,<br />
Bucureşti, 2006.<br />
<strong>3.</strong> Gheorghiu, H., Constantinescu, I.N., Hadăr, A., Petre, C.,<br />
Methodes numeriques pour le calcul des structures de resistance,<br />
Editura BREN, Bucureşti, 1999.<br />
4. Hadăr, A., Marin, C., Petre, C., Voicu, A., Metode numerice<br />
în inginerie, Editura Politehnica Press, Bucureşti, 2005.<br />
5. Hadăr, A., Constantinescu, I.N., Gheorghiu, H., Coteţ, C.E,<br />
Modelare şi modele <strong>pentru</strong> calcule în ingineria mecanică, Editura<br />
Printech, Bucureşti, 2007.<br />
6. Marin, C., Hadăr, A., Fl. Popa, L. Albu, Modelarea cu<br />
elemente finite a <strong>structuri</strong>lor mecanice, Editura Academiei şi Editura<br />
AGIR, Bucureşti, 2002.<br />
7. Sorohan, Şt., Constantinescu, I. N., Practica modelării şi<br />
analizei cu elemente finite, Bucureşti, Editura Politehnica Press,<br />
200<strong>3.</strong><br />
76