

dinamica mecanismelor articulate modelate ca sisteme de puncte ...
dinamica mecanismelor articulate modelate ca sisteme de puncte ...
dinamica mecanismelor articulate modelate ca sisteme de puncte ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
m = diag[m<br />
1<br />
m<br />
1<br />
m<br />
1<br />
m<br />
2<br />
m<br />
2<br />
m<br />
2<br />
...<br />
m<br />
p<br />
m<br />
p<br />
m ]<br />
(21)<br />
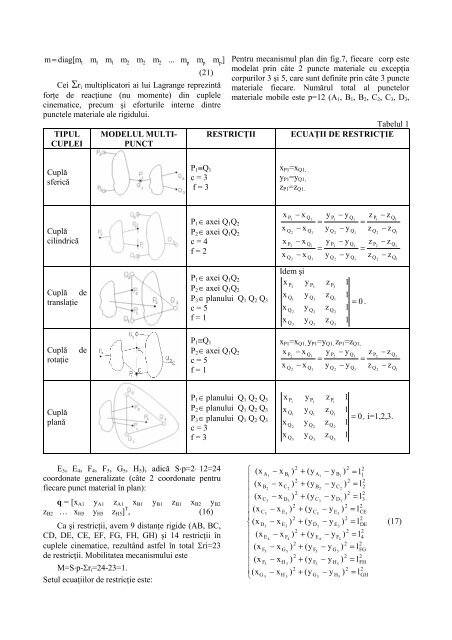
Cei r i multipli<strong>ca</strong>tori ai lui Lagrange reprezint<br />
fore <strong>de</strong> reaciune (nu momente) din cuplele<br />
cinematice, precum i eforturile interne dintre<br />
<strong>puncte</strong>le materiale ale rigidului.<br />
TIPUL<br />
CUPLEI<br />
MODELUL MULTI-<br />
PUNCT<br />
p<br />
Pentru me<strong>ca</strong>nismul plan din fig.7, fie<strong>ca</strong>re corp este<br />
mo<strong>de</strong>lat prin câte 2 <strong>puncte</strong> materiale cu excepia<br />
corpurilor 3 i 5, <strong>ca</strong>re sunt <strong>de</strong>finite prin câte 3 <strong>puncte</strong><br />
materiale fie<strong>ca</strong>re. Numrul total al <strong>puncte</strong>lor<br />
materiale mobile este p=12 (A 1 , B 1 , B 2 , C 2 , C 3 , D 3 ,<br />
RESTRIC5II<br />
Tabelul 1<br />
ECUA5II DE RESTRIC5IE<br />
Cupl<br />
sferic<br />
P 1 Q 1<br />
c = 3<br />
f = 3<br />
x P1 =x Q1,<br />
y P1 =y Q1,<br />
z P1 =z Q1.<br />
Cupl<br />
cilindric<br />
P 1 axei Q 1 Q 2<br />
P 2 axei Q 1 Q 2<br />
c = 4<br />
f = 2<br />
x<br />
x<br />
x<br />
x<br />
P1<br />
Q2<br />
P2<br />
Q2<br />
x<br />
x<br />
x<br />
x<br />
Q1<br />
Q1<br />
Q1<br />
Q1<br />
=<br />
=<br />
y<br />
y<br />
y<br />
y<br />
P1<br />
Q 2<br />
P2<br />
Q 2<br />
y<br />
y<br />
y<br />
y<br />
Q1<br />
Q1<br />
Q1<br />
Q1<br />
z<br />
=<br />
z<br />
z<br />
=<br />
z<br />
P1<br />
Q 2<br />
P2<br />
Q 2<br />
z<br />
z<br />
z<br />
z<br />
Q1<br />
Q1<br />
Q1<br />
Q1<br />
Cupl <strong>de</strong><br />
translaie<br />
P 1 axei Q 1 Q 2<br />
P 2 axei Q 1 Q 2<br />
P 3 planului Q 1 Q 2 Q 3<br />
c = 5<br />
f = 1<br />
I<strong>de</strong>m i<br />
x y<br />
x<br />
x<br />
x<br />
P3<br />
Q1<br />
Q2<br />
Q3<br />
y<br />
y<br />
y<br />
P3<br />
Q1<br />
Q2<br />
Q3<br />
z<br />
z<br />
z<br />
z<br />
P3<br />
Q1<br />
Q2<br />
Q3<br />
1<br />
1<br />
= 0 .<br />
1<br />
1<br />
Cupl<br />
rotaie<br />
<strong>de</strong><br />
P 1 Q 1<br />
P 2 axei Q 1 Q 2<br />
c = 5<br />
f = 1<br />
x P1 =x Q1, y P1 =y Q1, z P1 =z Q1,<br />
x P x<br />
2 Q y<br />
1 P y<br />
2 Q z<br />
1<br />
= =<br />
x x y y z<br />
Q2<br />
Q1<br />
Q 2<br />
Q1<br />
P2<br />
Q 2<br />
z<br />
z<br />
Q1<br />
Q1<br />
Cupl<br />
plan<br />
P 1 planului Q 1 Q 2 Q 3<br />
P 2 planului Q 1 Q 2 Q 3<br />
P 3 planului Q 1 Q 2 Q 3<br />
c = 3<br />
f = 3<br />
x<br />
x<br />
x<br />
x<br />
Pi<br />
Q1<br />
Q2<br />
Q3<br />
y<br />
y<br />
y<br />
y<br />
Pi<br />
Q1<br />
Q2<br />
Q3<br />
z<br />
z<br />
z<br />
z<br />
Pi<br />
Q1<br />
Q2<br />
Q3<br />
1<br />
1<br />
= 0 , i=1,2,3.<br />
1<br />
1<br />
E 3 , E 4 , F 4 , F 5 , G 5 , H 5 ), adic Sp=2×12=24<br />
coordonate generalizate (câte 2 coordonate pentru<br />
fie<strong>ca</strong>re punct material în plan):<br />
q = [x A1 y A1 z A1 x B1 y B1 z B1 x B2 y B2<br />
z B2 … x H5 y H5 z H5 ] T , (16)<br />
Ca i restricii, avem 9 distane rigi<strong>de</strong> (AB, BC,<br />
CD, DE, CE, EF, FG, FH, GH) i 14 restricii în<br />
cuplele cinematice, rezultând astfel în total ri=23<br />
<strong>de</strong> restricii. Mobilitatea me<strong>ca</strong>nismului este<br />
M=Sp-r i =24-23=1.<br />
Setul ecuaiilor <strong>de</strong> restricie este:<br />
2<br />
B )<br />
1<br />
2<br />
C )<br />
2<br />
2<br />
D )<br />
3<br />
2<br />
(x A x<br />
1<br />
<br />
(x B x<br />
2<br />
(x C x<br />
3<br />
<br />
(x C x E )<br />
3 3<br />
2<br />
(x<br />
D x E )<br />
3 3<br />
<br />
(x <br />
<br />
E x F )<br />
4 4<br />
2<br />
(x F x G )<br />
5<br />
5<br />
<br />
2<br />
(x F xH<br />
)<br />
5<br />
5<br />
<br />
2<br />
<br />
(xG<br />
xH<br />
)<br />
5<br />
5<br />
2<br />
+ (y<br />
+ (y<br />
+ (y<br />
+ (y<br />
+ (y<br />
+ (y<br />
+ (y<br />
+ (y<br />
+ (y<br />
A1<br />
B2<br />
C3<br />
C3<br />
D3<br />
E4<br />
F5<br />
F5<br />
G5<br />
y<br />
y<br />
y<br />
y<br />
y<br />
y<br />
y<br />
y<br />
y<br />
2<br />
B )<br />
1<br />
2<br />
C )<br />
2<br />
2<br />
D )<br />
3<br />
2<br />
E )<br />
3<br />
2<br />
E )<br />
3<br />
2<br />
F )<br />
4<br />
2<br />
G )<br />
5<br />
2<br />
H )<br />
5<br />
2<br />
H )<br />
5<br />
= l<br />
= l<br />
= l<br />
= l<br />
= l<br />
= l<br />
= l<br />
= l<br />
= l<br />
2<br />
1<br />
2<br />
2<br />
2<br />
3<br />
2<br />
CE<br />
2<br />
DE<br />
2<br />
4<br />
2<br />
FG<br />
2<br />
FH<br />
2<br />
GH<br />
(17)













