Lucrarea nr. 3 Comanda directÄ Åi controlul vitezei la cilindrii cu ...
Lucrarea nr. 3 Comanda directÄ Åi controlul vitezei la cilindrii cu ...
Lucrarea nr. 3 Comanda directÄ Åi controlul vitezei la cilindrii cu ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Lucrarea</strong> <strong>nr</strong>. 3<br />
<strong>Comanda</strong> directă şi <strong>controlul</strong> <strong>vitezei</strong> <strong>la</strong> <strong>cilindrii</strong> <strong>cu</strong> dublă acţiune<br />
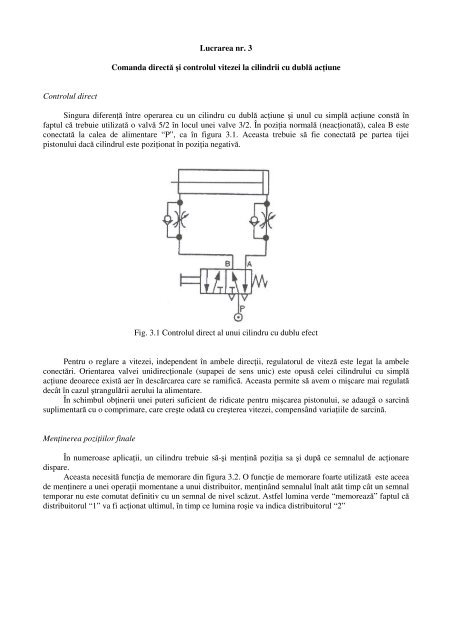
Controlul direct<br />
Singura diferenţă între operarea <strong>cu</strong> un cilindru <strong>cu</strong> dublă acţiune şi unul <strong>cu</strong> simplă acţiune constă în<br />
faptul că trebuie utilizată o valvă 5/2 în lo<strong>cu</strong>l unei valve 3/2. În poziţia normală (neacţionată), calea B este<br />
conectată <strong>la</strong> calea de alimentare “P”, ca în figura 3.1. Aceasta trebuie să fie conectată pe partea tijei<br />
pistonului dacă cilindrul este poziţionat în poziţia negativă.<br />
Fig. 3.1 Controlul direct al unui cilindru <strong>cu</strong> dublu efect<br />
Pentru o reg<strong>la</strong>re a <strong>vitezei</strong>, independent în ambele direcţii, regu<strong>la</strong>torul de viteză este legat <strong>la</strong> ambele<br />
conectări. Orientarea valvei unidirecţionale (supapei de sens unic) este opusă celei cilindrului <strong>cu</strong> simplă<br />
acţiune deoarece există aer în descărcarea care se ramifică. Aceasta permite să avem o mişcare mai regu<strong>la</strong>tă<br />
decât în cazul ştrangulării aerului <strong>la</strong> alimentare.<br />
În schimbul obţinerii unei puteri suficient de ridicate pentru mişcarea pistonului, se adaugă o sarcină<br />
suplimentară <strong>cu</strong> o comprimare, care creşte odată <strong>cu</strong> creşterea <strong>vitezei</strong>, compensând variaţiile de sarcină.<br />
Menţinerea poziţiilor finale<br />
În numeroase aplicaţii, un cilindru trebuie să-şi menţină poziţia sa şi după ce semnalul de acţionare<br />
dispare.<br />
Aceasta necesită funcţia de memorare din figura 3.2. O funcţie de memorare foarte utilizată este aceea<br />
de menţinere a unei operaţii momentane a unui distribuitor, menţinând semnalul înalt atât timp cât un semnal<br />
temporar nu este comutat definitiv <strong>cu</strong> un semnal de nivel scăzut. Astfel lumina verde “memorează” faptul că<br />
distribuitorul “1” va fi acţionat ultimul, în timp ce lumina roşie va indica distribuitorul “2”
Fig. 3.2 Comutarea de <strong>la</strong> roşu <strong>la</strong> verde prin acţionarea distribuitorului “1” şi de <strong>la</strong> verde <strong>la</strong> roşu prin<br />
acţionarea distribuitorului “2”<br />
O valvă bistabilă rămâne în poziţia sa până când este comutată în poziţia opusă.<br />
În figura 3.3 extensia tijei unui cilindru <strong>cu</strong> dublă acţiune este pornită <strong>cu</strong> valva “1” şi este retrasă <strong>cu</strong><br />
valva “2”. Valva “3” menţine poziţia sa şi, în consecinţă, şi pe cea a cilindrului.<br />
Valva “3” va comuta numai când este acţionată una dintre valvele <strong>cu</strong> comandă manuală.<br />
Dacă ambele căi ale pilotului sunt presurizate concomitent, ar<strong>cu</strong>l menţine poziţia iniţială, deoarece o<br />
presiune egală care acţionează asupra celor două suprafeţe egale nu poate schimba semnalul primar.<br />
În practică, acest fenomen este denumit “comanda suprapusă” şi constituie una din problemele majore<br />
ale proiectării cir<strong>cu</strong>itelor.<br />
Fig. 3.3 Conservarea poziţiilor unui cilindru <strong>cu</strong> dublu efect<br />
Specificarea poziţiilor cilindrului. Revenirea automată.<br />
Valva “2” din cir<strong>cu</strong>itul din fig. 3.3 poate fi înlo<strong>cu</strong>ită de o valvă <strong>cu</strong> comandă <strong>cu</strong> pârghie <strong>cu</strong> rolă<br />
acţionată <strong>la</strong> extremitatea pozitivă a <strong>cu</strong>rsei cilindrului. Cilindrul comută atunci valva “3” şi se va întoarce<br />
automat. Se stabileşte astfel mişcarea alternativă a cilindrului, ca în figura 3.4.
Fig. 3.4 Retragerea automată a unui cilindru<br />
Apare o difi<strong>cu</strong>ltate dacă valva “1” nu este eliberată când cilindrul ajunge <strong>la</strong> capătul <strong>cu</strong>rsei sale, aceea<br />
că cilindrul nu revine.<br />
Valva “2” nu este în măsură să comute valva “3” atât timp cât semnalul este în opoziţie <strong>cu</strong> valva “1”.<br />
O valvă bistabilă poate fi comutată numai <strong>cu</strong> o presiune pilot când intrarea opusă a pilotului este descărcată.<br />
Dacă un cilindru trebuie retras necondiţionat înainte de a ajunge <strong>la</strong> capătul <strong>cu</strong>rsei, o soluţie simplă<br />
constă în transformarea semnalului valvei <strong>cu</strong> comandă manuală într-un impuls.<br />
Acest lucru este reprezentat în figura 3.5.<br />
Fig. 3.5 Retragerea automată a unui cilindru şi <strong>cu</strong> un semnal prezent<br />
Temă de <strong>la</strong>borator<br />
Să se simuleze cele cinci scheme prezentate anterior utilizând software-ul FluidSim.