Technomarket Industrie nr. 58

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
mecatronică<br />
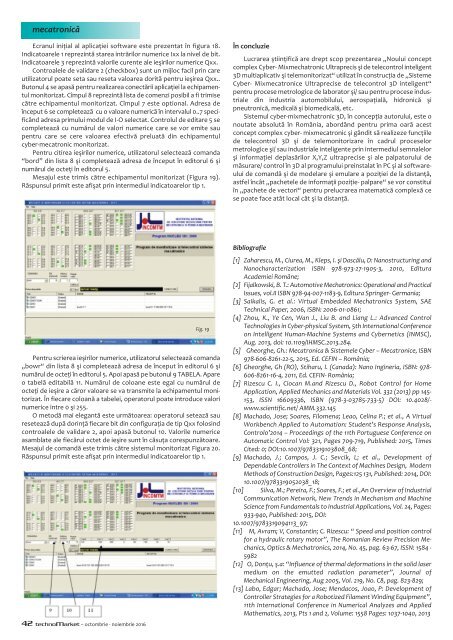
Ecranul iniţial al aplicaţiei software este prezentat în figura 18.<br />
Indicatoarele 1 reprezintă starea intrărilor numerice Ixx la nivel de bit.<br />
Indicatoarele 3 reprezintă valorile curente ale ieşirilor numerice Qxx.<br />
Controalele de validare 2 (checkbox) sunt un mijloc facil prin care<br />
utilizatorul poate seta sau reseta valoarea dorită pentru ieşirea Qxx..<br />
Butonul 4 se apasă pentru realizarea conectării aplicaţiei la echipamentul<br />
monitorizat. Cîmpul 8 reprezintă lista de comenzi posibil a fi trimise<br />
către echipamentul monitorizat. Cîmpul 7 este optional. Adresa de<br />
început 6 se completează cu o valoare numerică în intervalul 0..7 specificând<br />
adresa primului modul de I‐O selectat. Controlul de editare 5 se<br />
completează cu numărul de valori numerice care se vor emite sau<br />
pentru care se cere valoarea efectivă preluată din echipamentul<br />
cyber‐mecatronic monitorizat.<br />
Pentru citirea ieşirilor numerice, utilizatorul selectează comanda<br />
“bord” din lista 8 şi completează adresa de început în editorul 6 şi<br />
numărul de octeţi în editorul 5.<br />
Mesajul este trimis către echipamentul monitorizat (Figura 19).<br />
Răspunsul primit este afişat prin intermediul indicatoarelor tip 1.<br />
În concluzie<br />
Lucrarea ştiinţifică are drept scop prezentarea „Noului concept<br />
complex Cyber‐ Mixmechatronic Ultraprecis şi de telecontrol inteligent<br />
3D multiaplicativ şi telemonitorizat“ utilizat în construcţia de „Sisteme<br />
Cyber‐ Mixmecatronice Ultraprecise de telecontrol 3D inteligent“<br />
pentru procese metrologice de laborator şi/ sau pentru procese industriale<br />
din industria automobilului, aerospaţială, hidronică şi<br />
pneutronică, medicală şi biomedicală, etc.<br />
Sistemul cyber‐mixmechatronic 3D, în concepţia autorului, este o<br />
noutate absolută în România, abordând pentru prima oară acest<br />
concept complex cyber‐ mixmecatronic şi gândit să realizeze funcţiile<br />
de telecontrol 3D şi de telemonitorizare în cadrul proceselor<br />
metrologice şi/ sau industriale inteligente prin intermediul semnalelor<br />
şi informaţiei deplasărilor X,Y,Z ultraprecise şi ale palpatorului de<br />
măsurare/ control în 3D al programului preinstalat în PC şi al softwareului<br />
de comandă şi de modelare şi emulare a poziţiei de la distanţă,<br />
astfel încât „pachetele de informaţii poziţie‐ palpare“ se vor constitui<br />
în „pachete de vectori“ pentru prelucrarea matematică complexă ce<br />
se poate face atât local cât şi la distanţă.<br />
Pentru scrierea ieşirilor numerice, utilizatorul selectează comanda<br />
„bowr“ din lista 8 şi completează adresa de început în editorul 6 şi<br />
numărul de octeţi în editorul 5. Apoi apasă pe butonul 9 TABELA. Apare<br />
o tabelă editabilă 11. Numărul de coloane este egal cu numărul de<br />
octeţi de ieşire a căror valoare se va transmite la echipamentul monitorizat.<br />
În fiecare coloană a tabelei, operatorul poate introduce valori<br />
numerice intre 0 şi 255.<br />
O metodă mai elegantă este următoarea: operatorul setează sau<br />
resetează după dorinţă fiecare bit din configuraţia de tip Qxx folosind<br />
controalele de validare 2, apoi apasă butonul 10. Valorile numerice<br />
asamblate ale fiecărui octet de ieşire sunt în căsuţa corespunzătoare.<br />
Mesajul de comandă este trimis către sistemul monitorizat Figura 20.<br />
Răspunsul primit este afişat prin intermediul indicatoarelor tip 1.<br />
42 technomarket – octombrie ‐ noiembrie 2016<br />
Fig. 19<br />
Bibliografie<br />
[1] Zaharescu, M., Ciurea, M., Kleps, I. şi Dascălu, D: Nanostructuring and<br />
Nanocharacterization ISBN 978‐973‐27‐1905‐3, 2010, Editura<br />
Academiei Române;<br />
[2] Fijalkowski, B. T.: Automotive Mechatronics: Operational and Practical<br />
Issues, vol.II ISBN 978‐94‐007‐1183‐9, Editura Springer‐ Germania;<br />
[3] Saikalis, G. et al.: Virtual Embedded Mechatronics System, SAE<br />
Technical Paper, 2006, ISBN: 2006‐01‐0861;<br />
[4] Zhou, K., Ye Cen, Wan J., Liu B. and Liang L.: Advanced Control<br />
Technologies in Cyber‐physical System, 5th International Conference<br />
on Intelligent Human‐Machine Systems and Cybernetics (INMSC),<br />
Aug. 2013, doi: 10.1109/IHMSC.2013.284.<br />
[5] Gheorghe, Gh.: Mecatronica & Sistemele Cyber – Mecatronice, ISBN<br />
978‐606‐8261‐22‐5, 2015, Ed. CEFIN – România;<br />
[6] Gheorghe, Gh (RO), Stiharu, I. (Canada): Nano Ingineria, ISBN: 978‐<br />
606‐8261‐16‐4, 2011, Ed. CEFIN‐ România;<br />
[7] Rizescu C. I., Ciocan M.and Rizescu D., Robot Control for Home<br />
Application, Applied Mechanics and Materials Vol. 332 (2013) pp 145‐<br />
153, ISSN 16609336, ISBN (978‐3‐03785‐733‐5) DOI: 10.4028/ ‐<br />
www.scientific.net/ AMM.332.145<br />
[8] Machado, Jose; Soares, Filomena; Leao, Celina P.; et al., A Virtual<br />
Workbench Applied to Automation: Student’s Response Analysis,<br />
Controlo’2014 – Proceedings of the 11th Portuguese Conference on<br />
Automatic Control Vol: 321, Pages 709‐719, Published: 2015, Times<br />
Cited: 0; DOI:10.1007/9783319103808_68;<br />
[9] Machado, J.; Campos, J. C.; Sevcik, L; et al., Development of<br />
Dependable Controllers in The Context of Machines Design, Modern<br />
Methods of Construction Design, Pages:125 131, Published: 2014, DOI:<br />
10.1007/9783319052038_18;<br />
[10] Silva, M.; Pereira, F.; Soares, F.; et al.,An Overview of Industrial<br />
Communication Network, New Trends in Mechanism and Machine<br />
Science from Fundamentals to Industrial Applications, Vol. 24, Pages:<br />
933‐940, Published: 2015, DOI:<br />
10.1007/9783319094113_97;<br />
[11] M, Avram; V, Constantin; C. Rizescu: “ Speed and position control<br />
for a hydraulic rotary motor”, The Romanian Review Precision Mechanics,<br />
Optics & Mechatronics, 2014, No. 45, pag. 63‐67, ISSN: 1<strong>58</strong>4 ‐<br />
5982<br />
[12] O, Donţu, ş.a: “Influence of thermal deformations in the solid laser<br />
medium on the emutted radiation parameter”, Journal of<br />
Mechanical Engineering, Aug 2005, Vol. 219, No. C8, pag. 823‐829;<br />
[13] Labo, Edgar; Machado, Jose; Mendacos, Joao, P: Development of<br />
Controller Strategies for a Robotized Filament Winding Equipment”,<br />
11th International Conference in Numerical Analyzes and Applied<br />
Mathematics, 2013, Pts 1 and 2, Volume: 15<strong>58</strong> Pages: 1037‐1040, 2013