Tentamen i Mekanik för F, del 2 - Ftek - Chalmers tekniska högskola
Tentamen i Mekanik för F, del 2 - Ftek - Chalmers tekniska högskola
Tentamen i Mekanik för F, del 2 - Ftek - Chalmers tekniska högskola

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
a<br />
I = Tr − F ρ<br />
r<br />
där I är tröghetsmomentet m.a.p. masscentrum. Ur dessa tre ekvationer kan vi<br />
bestämma a, N och T. Resultatet <strong>för</strong> a är<br />
r cosα<br />
− ρ<br />
a = rF<br />
2 <br />
Mr + I <br />
Vi noterar att tecknet på a stämmer med vad som sades inledningsvis om rullningens<br />
riktning. Nu återstår bara att uttrycka M och I i de givna storheterna µ, m, ρ och r:<br />
M = µ + 2m<br />
1 2 1 2<br />
I = µρ + 2mr<br />
2 2<br />
Efter lite algebra fås svaret.<br />
r cosα<br />
− ρ <br />
a = 2r<br />
F med positiv riktning åt höger.<br />
2µ r + 6mr<br />
+ µρ <br />
Svar: 2 2 2<br />
Uppgift 4<br />
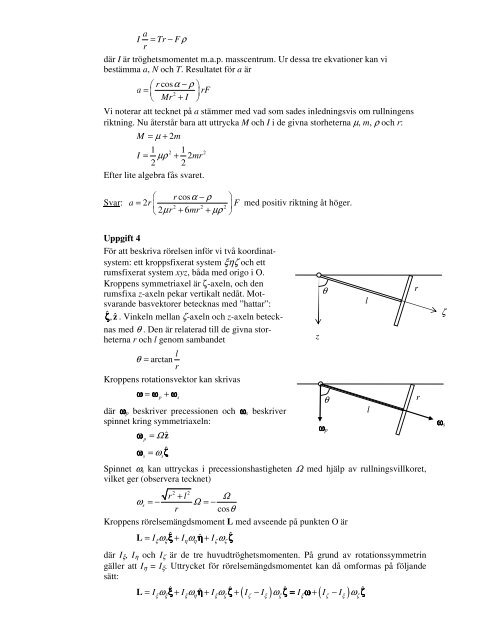
För att beskriva rörelsen in<strong>för</strong> vi två koordinatsystem:<br />
ett kroppsfixerat system ξηζ och ett<br />
rumsfixerat system xyz, båda med origo i O.<br />
Kroppens symmetriaxel är ζ-axeln, och den<br />
rumsfixa z-axeln pekar vertikalt nedåt. Motsvarande<br />
basvektorer betecknas med ”hattar”:<br />
ζ ˆ,zˆ . Vinkeln mellan ζ-axeln och z-axeln betecknas<br />
med θ . Den är relaterad till de givna storheterna<br />
r och l genom sambandet<br />
arctan l<br />
θ =<br />
r<br />
Kroppens rotationsvektor kan skrivas<br />
ω ω = ω ω + ωω<br />
ω<br />
p s<br />
där ωp beskriver precessionen och ωs beskriver<br />
spinnet kring symmetriaxeln:<br />
ω<br />
p<br />
= Ω zˆ<br />
ω ω = ω ζ<br />
ζˆ<br />
s s<br />
Spinnet ωs kan uttryckas i precessionshastigheten Ω med hjälp av rullningsvillkoret,<br />
vilket ger (observera tecknet)<br />
2 2<br />
r + l Ω<br />
ωs = − Ω = −<br />
r cosθ<br />
Kroppens rörelsemängdsmoment L med avseende på punkten O är<br />
L = I ω ξ ξˆ + I ω ηη η ηˆ + I ω ζ<br />
ζˆ<br />
ξ ξ η η ζ ζ<br />
där Iξ, Iη och Iζ är de tre huvudtröghetsmomenten. På grund av rotationssymmetrin<br />
gäller att Iη = Iξ. Uttrycket <strong>för</strong> rörelsemängdsmomentet kan då omformas på följande<br />
sätt:<br />
z<br />
θ<br />
θ<br />
ωp<br />
( ) ( )<br />
L = I ω ξ ξˆ + I ω η ηˆ + I ω ζ ζˆ + I − I ω ζ ζ ˆ = = I ω ω + I − I ω ζ<br />
ζˆ<br />
ξ ξ ξ η ξ ζ ζ ξ ζ ξ ζ ξ ζ<br />
l<br />
l<br />
r<br />
r<br />
ζ<br />
ωs