

(t) +
(t) +
(t) +

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
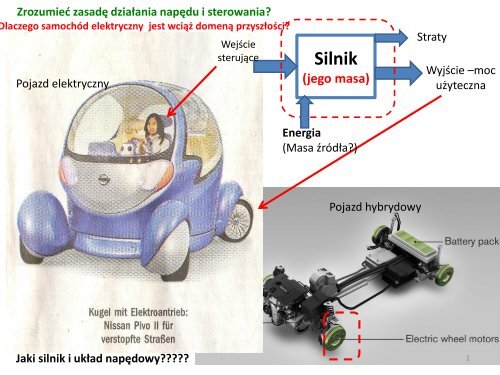
Zrozumieć zasadę działania napędu i sterowania?<br />
laczego samochód elektryczny jest wciąż domeną przyszłości?<br />
Pojazd elektryczny<br />
Wejście<br />
sterujące<br />
Silnik<br />
(jego masa)<br />
Straty<br />
Wyjście –moc<br />
użyteczna<br />
Energia<br />
(Masa źródła?)<br />
Pojazd hybrydowy<br />
Jaki silnik i układ napędowy?????<br />
1
Podstawowe elementy układu napędowego mające wpływ na<br />
konstrukcję układu napędowego o regulowanej prędkości:<br />
Konstrukcja silnika - mamy do wyboru silniki :<br />
• „prądu stałego” –(komutatorowe),<br />
• „prądu przemiennego” (indukcyjne)<br />
• silnik bezszczotkowy silnik prądu stałego „Brushless BLDC”<br />
• lub „bezszczotkowy synchroniczny” (prąd sinusoidalny)<br />
Przekształtniki energoelektroniczne: np.<br />
• o komutacji zewnętrznej („sieciowej”)<br />
• o komutacji własnej<br />
Układy sterowania :<br />
• analogowe<br />
• cyfrowe<br />
Poznajemy właściwości opisane równaniami bez wchodzenia w szczegóły budowy – silnik jako „blok”.<br />
2
Napęd komutatorową maszyną prądu stałego<br />
PE<br />
M<br />
Regulacja prędkości - należy dobrze znać charakterystyki<br />
maszyny i jej zasadę działania ??<br />
Właściwości silnika zasilanego z przekształtnika????<br />
Cechy eksploatacyjne maszyny? i układu?<br />
3
„Pole radialne”<br />
Komutatorowy<br />
Silnik „prądu stałego”<br />
Maszyna synchroniczna<br />
wirujące pole radialne i<br />
wirujący wirnik<br />
Napęd prądu<br />
stałego (DC)<br />
Maszyna obcowzbudna –pole nieruchome – wirujący<br />
twornik DC – przełączanie prądu przez komutator tak<br />
aby przewodnik z prądem był w odpowiednim<br />
miejscu dla wytworzenia momentu napędowego 4
Uproszczony schemat zastępczy komutatorowego<br />
obcowzbudnego silnika prądu stałego<br />
F1<br />
A1<br />
A2<br />
F2<br />
Twornik (Wirnik) cylindryczny<br />
5
Model matematyczny silnika obcowzbudnego prądu stałego<br />
„podejście od strony użytkownika”<br />
Zasada działania silnika obcowzbudnego<br />
I A (t)<br />
L A , R A , J A<br />
T d (t)<br />
(t)<br />
T L (t)<br />
J L<br />
U A (t)<br />
Strumień Ψ F (t)<br />
I F (t)<br />
U F (t)<br />
Ψ A t<br />
Maszyna<br />
robocza<br />
(Load)<br />
Ψ F t<br />
= C F I F t strumień wzbudzenia<br />
Ψ A t<br />
= C A Ψ F t strumień „wchodzący w twornik<br />
Ψ A t<br />
= C A C F I F t<br />
T d = T e – moment elektromagnetyczny maszyny<br />
6
A1<br />
A2<br />
Silnik obcowzbudny – Równania podstawowe<br />
oparte na zasadzie działania maszyny<br />
E A (t) = (t) Ψ A (t)<br />
T d (t) = I A (t) Ψ A (t)<br />
Silnik obcowzbudny<br />
7
Model matematyczny silnika obcowzbudnego prądu stałego<br />
„podejście od strony użytkownika”<br />
Zasada działania silnika obcowzbudnego<br />
i A (t)<br />
L A , R A , J A<br />
T d (t)<br />
(t)<br />
T L (t)<br />
J L<br />
Położenie<br />
szczotek<br />
niewłaściwe<br />
pole Ψ F<br />
U A (t)<br />
I F (t)<br />
U f (t)<br />
α<br />
Ψ A<br />
MR<br />
Prąd twornika w przestrzeni jest<br />
nieoptymalny – moment jest zredukowany<br />
proporcjonalnie do sinα<br />
Ψ A t<br />
= C A Ψ F t sinα<br />
Normalnie α = (/2)<br />
sinα = 1<br />
8
Odpowiedź<br />
Dane maszyny?<br />
Wejście<br />
i A (t)<br />
X 11 X 12 X 13 X 14 X 15<br />
u F (t)<br />
i F (t)<br />
X 21 X 22 X 23 X 24 X 25<br />
u A (t)<br />
T d (t)<br />
(t)<br />
e a (t)<br />
=<br />
X 31 X 32 X 33 X 34 X 35<br />
X 41 X 42 X 43 X 44 X 45<br />
X 51 X 52 X 53 X 54 X 55<br />
*<br />
T L (t)<br />
H ain (t)<br />
T aou (t)<br />
X 61 X 62 X 63 X 64 X 65<br />
T ain (t)<br />
9
A1<br />
A2<br />
Silnik obcowzbudny – Równania podstawowe<br />
oparte na zasadzie działania maszyny<br />
E A (t) = (t) Ψ A (t)<br />
T d (t) = I A (t) Ψ A (t)<br />
Silnik obcowzbudny<br />
(t) = m (t)<br />
10
A1<br />
DC maszyna<br />
obcowzbudna<br />
komutatorowa<br />
A2<br />
Podstawowe równania obcowzbudnego silnika prądu stałego<br />
U A (t) = E A (t) + R A I A (t) + L A [dI A (t)/dt)]<br />
E A (t) = (t) Ψ A (t)<br />
U A (t) = (t) Ψ A (t) + R A I A (t) + L A [dI A (t)/dt)]<br />
(t) = [U A (t)/Ψ A (t)] - [R A I A (t) / Ψ A (t)]- L A [dI A (t)/dt)] / Ψ A (t)<br />
T d (t) = I A (t) Ψ A (t) = - T L (t) + (J A +J L )d/dt<br />
I A (t) =[-T L (t)]/ Ψ A (t) + (J A +J L )d/dt]/ Ψ A (t)<br />
11
Obcowzbudna<br />
maszyna prądu<br />
stałego<br />
Równania silnika obcowzbudnego w stanie ustalonym<br />
L A [dI A (t)/dt)] = 0 ; (J A +J L )d (t)/dt = 0 ; T d + T L = 0<br />
U A =Ψ A + R A I A<br />
(t) = m (t)<br />
= U A /Ψ A - R A I A /Ψ A<br />
T d = I A Ψ A = - T L<br />
I A = -T L / Ψ A<br />
= U A /Ψ A - R A [-T L / Ψ 2 A ]<br />
12
Obcowzbudny silnik prądu stałego zasilany napięciem o stałej wartości - stany ustalone<br />
U A =Ψ A + R A I A<br />
= (U A - R A I A )/ Ψ A = U A / Ψ A - R A I A / Ψ A<br />
T d = I A Ψ A = - T L<br />
I A = -T L / Ψ A<br />
= U A /Ψ A - R A [-T L / Ψ 2 A ]<br />
U A<br />
E A<br />
<br />
1/ Ψ A<br />
R A<br />
T L<br />
-1<br />
T d<br />
1/Ψ A<br />
I A = T d /Ψ A = -T L /Ψ A<br />
I A<br />
Schemat zastępczy obcowzbudnego silnika prądu stałego w stanie ustalonym<br />
13
U A<br />
E A<br />
1/ Ψ A<br />
<br />
Wielkości<br />
wejściowe<br />
T L<br />
-1<br />
T d<br />
1/Ψ A<br />
R A<br />
I A = T d /Ψ A =- T L /Ψ A<br />
I A<br />
Wielkości<br />
wyjściowe<br />
<br />
=<br />
-R A /Ψ A<br />
2<br />
1/ Ψ A<br />
I A 0 1/ Ψ A<br />
U A<br />
-T L<br />
Dane maszyny -<br />
konstrukcja<br />
14
Stan ustalony prac maszyny<br />
U A<br />
E A<br />
1/ Ψ A<br />
<br />
Wielkości<br />
wejściowe<br />
R A<br />
Ω 0 =U a / Ψ<br />
Wielkości<br />
wyjściowe<br />
T L<br />
-1<br />
T d<br />
1/Ψ A<br />
I A = T d /Ψ A =- T L /Ψ A<br />
I A<br />
<br />
=<br />
1/ Ψ A<br />
-R A /Ψ A<br />
2<br />
U A<br />
0 =U A / Ψ A<br />
I A<br />
= 0 + Δ, Δ
Uproszczony opis obcowzbudnej maszyny prądu stałego –<br />
stany ustalone<br />
I A<br />
0 =U A / Ψ<br />
I A<br />
= 0 + Δ, Δ
= U A /Ψ A - R A [-T L / Ψ 2 A ]<br />
Wpływ dodatkowej rezystancji dołączonej szeregowo z<br />
uzwojeniem twornika – stałe (niezmienne) napięcie twornika<br />
= U A /Ψ A – (R A +R R )[-T L / Ψ 2 A ]<br />
0 =U A / Ψ<br />
I A<br />
R R3 > R R2 >R R1<br />
Ax<br />
A<br />
AR1<br />
R A<br />
Metoda „historyczna”<br />
obecnie niezalecana<br />
Ax1<br />
R A +R R1<br />
Ax2<br />
AR2<br />
R A +R R2<br />
Ax3<br />
AR3<br />
I A<br />
17<br />
T d = -T L<br />
I A = T d /Ψ A = -T L /Ψ A<br />
T dx<br />
R A +R R3
Podsumowanie i wnioski:<br />
Moc dostarczona do wału P = T d = - T L<br />
= U A (1/ Ψ A ) + T L R A (1/Ψ A2 )<br />
Moc dostarczona do wału P W = U A (-T L / Ψ A ) – T L<br />
2<br />
R A (1/Ψ A2 )<br />
Moc dostarczona przez źródło P źródła = U A (-T L / Ψ A )<br />
Straty elektryczne mocy w tworniku ΔP s = T L<br />
2<br />
R A (1/Ψ A2 )<br />
Wnioski: Aby otrzymać napęd o małych stratach (wysokiej sprawności) należy<br />
realizować pracę silnika przy wysokim strumieniu Ψ A i niskiej rezystancji twornika R A<br />
t.zn. w przypadku pracy z osłabianiem strumienia straty rosną<br />
Straty mocy gdy dodatkowa rezystancja jest włączona w obwodzie twornika<br />
ΔP s = T L<br />
2<br />
(R A +R R ) (1/Ψ A2 )<br />
18
Moc?<br />
P doodbio<br />
I A<br />
rnika<br />
T d<br />
<br />
T L<br />
P źródła<br />
U A<br />
U F<br />
E A<br />
W praktyce<br />
należy też<br />
uwzględnić straty<br />
mechaniczne<br />
Moc dostarczona do wału silnika P = T d = - T L<br />
= U A (1/ Ψ A ) + T L R A (1/Ψ A2 )<br />
I A = - T L / Ψ A<br />
Moc dostarczona do wału silnika P w = U A (-T L / Ψ A ) – T L<br />
2<br />
R A (1/Ψ A2 )<br />
Moc dostarczona przez źródło (U A I A )<br />
P źródła = U A (-T L / Ψ A )<br />
Straty elektryczne mocy w tworniku<br />
ΔP s = – T L<br />
2<br />
R A (1/Ψ A2 )<br />
19
Zastosowanie przekształtnika energoelektronicznego PTW do wytwarzania<br />
regulowanego napięcia dostarczanego do silnika<br />
Przekształtnik energoelektroniczny jako wzmacniacz mocy<br />
PTW<br />
I APTW<br />
Sygnał sterujący<br />
λ S<br />
U APTW<br />
U APTWmax<br />
P źródła<br />
k P<br />
U APTW<br />
k P = U APTW / λ S dla λ S < λ SS<br />
Charakterystyka dla stanu<br />
ustalonego bez obciążenia<br />
U APTWmax<br />
Przekształtnik tyrystorowy AC/DC,<br />
przekształtnik tranzystorowy AC/DC<br />
lub DC/DC<br />
λ S<br />
λ SS<br />
λ Sx<br />
20
Zastosowanie przekształtnika energoelektronicznego PTW do wytwarzania<br />
regulowanego napięcia dostarczanego do silnika w celu regulacji prędkości<br />
PTW<br />
I A<br />
P obciążenia<br />
T d<br />
<br />
T L<br />
λ S<br />
U APTW<br />
U A<br />
E A<br />
U F<br />
k P<br />
P source<br />
U APTWmax<br />
U APTW<br />
Zależność sygnału wyjściowego od sygnału<br />
sterującego w stanie bez obciążenia<br />
Przykład charakterystyki sterowania<br />
wzmacniaczem mocy U APTW = f(λ S )<br />
k P = U APTW / λ S<br />
λ S<br />
λ SS<br />
λ Sx<br />
21
Przekształtnik jako wzmacniacz mocy o dynamicznej rezystancji R PTW<br />
Zwykle przekształtniki cechują się małą rezystancja dynamiczną i dużym prądem zwarcia.<br />
Mała wartość rezystancji dynamicznej zapewnia niewielki spadek<br />
napięcia podczas obciążenia<br />
P źródła<br />
U APTW = U A<br />
U PTW = E PTW -I PTW R PTW = k p λ S - I PTW R PTW<br />
I PTW<br />
I A<br />
λ S<br />
Wzmacniacz<br />
napięcia<br />
(wzmacniacz<br />
mocy)<br />
k p , R PTW<br />
U PTW<br />
U F<br />
E A<br />
T d<br />
<br />
T L<br />
λ E<br />
S<br />
PTW<br />
k p<br />
R PTW<br />
I PTW<br />
U PTW<br />
Wzmacniacz mocy jako źródło napięcia o regulowanej wartości<br />
k p = E PTW /λ S<br />
22
Schemat blokowy wzmacniacza mocy – stany ustalone<br />
λ E<br />
S<br />
PTW<br />
k p<br />
R PTW<br />
U PTW<br />
E PTW<br />
λ S<br />
Charakterystyka<br />
statyczna<br />
wejście -wyjście<br />
I PTW<br />
k p = (E PTW /λ S )<br />
U PTW<br />
k p λ S1<br />
I PTW R PTW<br />
k p λ S2<br />
Charakterystyka prądowonapięciowa<br />
źródła mocy<br />
(”voltage regulation” -idiom)<br />
I PTW<br />
23
P źródła<br />
U APTW = U A<br />
Schemat blokowy – źródło -silnik<br />
I PTW<br />
I A<br />
λ S<br />
T L<br />
-1<br />
λ S<br />
T d<br />
Wzmacniacz<br />
mocy<br />
k p , R PTW<br />
E A<br />
E PTW<br />
1/ Ψ A<br />
k p<br />
U PTW<br />
U F<br />
R PTW<br />
U PTW =U A<br />
T d<br />
E A<br />
E A<br />
R A<br />
<br />
T L<br />
1/ Ψ A<br />
I A = T d /Ψ A =- T L /Ψ A<br />
<br />
I A<br />
24
λ S<br />
k p<br />
E PTW<br />
U PTW =U A<br />
E A<br />
1/ Ψ A<br />
<br />
R PTW<br />
R A<br />
T L<br />
-1<br />
T d<br />
1/ Ψ A<br />
I A = T d /Ψ A =- T L /Ψ A<br />
I A<br />
Charakterystyka mechaniczna?<br />
<br />
I A<br />
=<br />
k p /Ψ A<br />
0<br />
-(R PTW +R A )/Ψ A<br />
2<br />
1/ Ψ A<br />
λ S<br />
-T L<br />
01 = k p λ S1 /Ψ A<br />
02 = k p λ S2 /Ψ A<br />
, I A = 0 + Δ <br />
1<br />
2<br />
1 Przypadek niezmiennego napięcia 03 = k p λ S3 /Ψ A<br />
2 I A<br />
(wartość stała np. znamionowa<br />
2 Napięcie regulowane – wyjście przekształtnika<br />
= 0 + Δ = k p λ S / Ψ A + T L (R PTW +R a )/Ψ A2 )<br />
3<br />
25<br />
2<br />
1<br />
Td
Uproszczony model silnika obcowzbudnego – skutki<br />
odwzbudzania - przypomnienie<br />
I A<br />
T d<br />
<br />
T L<br />
0 =U A / Ψ<br />
I A<br />
= 0 + Δ, Δ
Realizacja dwóch zakresów pracy silnika:<br />
1. Regulacja napięcia twornika przy stałym strumieniu („przy stałym momencie”)<br />
2. Regulacja napięcia wzbudzenia przy stałym napięciu twornika („przy stałej mocy”)<br />
λ S<br />
PTW<br />
U APTW<br />
U A<br />
I A<br />
T d<br />
E<br />
I A<br />
F<br />
U F<br />
<br />
T L<br />
P źródłaA<br />
PTF<br />
P źródłaF<br />
Ψ A t = C A C F I F t<br />
27
Przekształtnik – wzmacniacz mocy<br />
Praca silnikowa<br />
E A = ωψ A ≈ U A<br />
U A osiągalne<br />
napięcie<br />
wzmacniacza mocy<br />
E A = ωψ A sem dla stałego wzbudzenia<br />
U A max<br />
U A<br />
Czy jest możliwe<br />
uzyskanie prędkości<br />
większej niż?<br />
ω max ≈ U Amax / ψ An ?<br />
λ S<br />
λ S1<br />
Stany ustalone<br />
28
T d -Moment, E A -sem., Prąd twornika I A<br />
T d<br />
„Praca ze stałym<br />
momentem”<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = const<br />
I A = const<br />
E A = ωψ A = var<br />
„Praca ze stałą mocą”<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = var (I F =var)<br />
I A = const<br />
E Amax = ωψ A = const<br />
Praca silnikowa<br />
maszyna obcowzbudna<br />
ma dwa „wejścia”<br />
E Amax = ω ψ A = const<br />
ψ A<br />
ω<br />
I A = const<br />
ω e<br />
W wyniku zmniejszenia<br />
strumienie ψ A prędkość<br />
wzrasta<br />
ωψ A ≈ U A<br />
Stany pracy ustalonej<br />
ω prędkość<br />
29
P Moc<br />
„Praca ze stałym<br />
momentem”<br />
„Praca ze stałą mocą”<br />
Praca silnikowa<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = const<br />
E A = ωψ A = var<br />
P 2<br />
T d = ψ A I A<br />
P = ωψ A I<br />
ψ A = var<br />
E A = ωψ A = const<br />
P 1<br />
I 2A > I A1<br />
I A2 = const<br />
I A1 < I A2<br />
I A1 = const<br />
ω e<br />
ω speed<br />
ωψ A ≈ U A<br />
Praca ze stałym momentem i ze stała mocą – popularne wyrażenia<br />
– skróty – dla opisu stanów pracy ustalonej<br />
30
z<br />
P moc , T - moment<br />
Praca silnikowa<br />
T d1<br />
„Praca ze stałym<br />
momentem”<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = const<br />
E A = ωψ A = var<br />
T d2<br />
„Praca ze stałą mocą”<br />
P 2 = ωψ A I 2<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = var<br />
E A = ωψ = const<br />
P 1 = ωψ A I 1<br />
I A2 > I A1<br />
I A2 = const<br />
I A1 < I A2<br />
I A1 = const<br />
I A1<br />
I A2<br />
31<br />
ωψ A ≈ U<br />
ω prędkość<br />
Stany pracy ustalonej - podsumowanie - maksymalne wartości<br />
momentu i mocy przy stałej wartości prądu twornika
P moc , T - moment<br />
„Praca ze stałym<br />
momentem”<br />
„Praca ze stałą mocą”<br />
Praca silnikowa<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = const<br />
E A = ωψ A = var<br />
T d2<br />
P 2 = ωψ A I 2<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = var<br />
E A = ωψ = const<br />
I A2 = const<br />
I A2<br />
32<br />
ωψ A ≈ U<br />
ω prędkość<br />
Stany pracy ustalonej podsumowanie – jeśli np. prąd ma wartość<br />
dopuszczalną to całe pole pod liniami prądu, momentu, mocy są do<br />
dyspozycji – pojęcie „stałej mocy” jest tu tylko symbolem stanu pracy
P moc , T - moment<br />
„Praca ze stałym<br />
momentem”<br />
„Praca ze stałą mocą”<br />
Praca silnikowa<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = const<br />
E A = ωψ A = var<br />
T d2<br />
P 2 = ωψ A I 2<br />
T d = ψ A I A<br />
P = ωψ A I A<br />
ψ A = var<br />
E A = ωψ = const<br />
I A2 = const<br />
Moc odbiornika –np. moc<br />
pompy<br />
I A2<br />
T L Moment obciążenia<br />
ωψ A ≈ U<br />
ω prędkość<br />
Stany pracy ustalonej podsumowanie – jeśli np. prąd ma wartość<br />
dopuszczalną to całe pole pod liniami prądu, momentu, mocy są do<br />
33<br />
dyspozycji – pojęcie „stałej mocy” jest tu tylko symbolem stanu pracy
Sterowanie napędu ze wzmacniacza operacyjnego – (analogowego lub cyfrowego)<br />
ε IAr<br />
Wzmacniacz<br />
sygnału<br />
k I<br />
λ S<br />
Wzmacniacz<br />
mocy<br />
k p , R p<br />
U A<br />
U F<br />
E A<br />
T d<br />
<br />
T L<br />
k I = λ S / ε IAr<br />
I A<br />
ε IAr<br />
k I<br />
λ S<br />
k p<br />
E PTW<br />
U PTW =U A<br />
E A<br />
1/ Ψ A<br />
<br />
R PTW<br />
R A<br />
T L<br />
-1<br />
T d<br />
1/ Ψ A<br />
I A = T d /Ψ A =- T L /Ψ A<br />
I A<br />
34
Charakterystyka<br />
(statyczna)<br />
wzmocnienia w<br />
stanach<br />
ustalonych<br />
λ S<br />
ε IAr<br />
k I = λ S /ε IAr<br />
w zakresie<br />
liniowym<br />
Wzmacniacz mocy ma dużą rezystancję<br />
wejściową – zatem nie ma wpływu na<br />
obciążenie wzmacniacza sygnału .<br />
Zwykle wzmacniacz sygnału jest wykonany w<br />
programie mikroprocesora DSP<br />
DSP – Digital Signal Processor<br />
Np. k I = 10 000<br />
Wzmacniacz<br />
sygnału<br />
Wzmacniacz<br />
mocy<br />
Silnik<br />
ε IAr<br />
k I<br />
λ S<br />
k p<br />
E PTW<br />
U PTW =U A<br />
E A<br />
1/ Ψ A<br />
<br />
DSP<br />
R PTW<br />
R A<br />
T L<br />
-1<br />
T d<br />
1/ Ψ A<br />
I A = T d /Ψ A =- T L /Ψ A<br />
I A<br />
35
Podstawowe układy regulacji w napędzie<br />
1.układ regulacji prądu silnika elektrycznego<br />
zadana<br />
prędkość<br />
zadany<br />
prąd<br />
Charakterystyka<br />
dynamiczna<br />
pomiar prądu<br />
sensor<br />
PI<br />
Regulator<br />
prędkości<br />
PI<br />
Regulator<br />
prądu –<br />
(momentu)<br />
λ S<br />
silnik<br />
Maszyna<br />
robocza<br />
sygnał prądu<br />
Podczas projektowania napędu dobiera się wszystkie elementy układu dla uzyskania<br />
zadanych właściwości statycznych i dynamicznych<br />
Układ z dobrze działającym regulatorem prądu zapewnia bezawaryjną pracę napędu –<br />
również w stanach przejściowych<br />
36
ε IAr<br />
WZMACNIACZ<br />
SYGNAŁU<br />
(REGULATOR)<br />
k I<br />
λ S<br />
λ S = k I ε IAr<br />
37<br />
k I = λ S / ε IAr<br />
λ S<br />
Charakterystyki dla stanu<br />
ustalonego – nastawianie<br />
wartości maksymalnej<br />
λ S1max<br />
λ S2max<br />
ε IAr<br />
λ S3max<br />
k I = (λ S /ε IAr )<br />
Wzmocnienie dotyczy tylko<br />
części liniowej (bez nasycenia)
ε IAr<br />
WZMACNIACZ<br />
SYGNAŁU<br />
(REGULATOR)<br />
k I<br />
λ S<br />
Odpowiedź statyczna λ S = k I ε IAr<br />
Odpowiedź dynamiczna λ S = f(t, k I ε IAr )<br />
k I = λ S / ε IAr<br />
Odpowiedź dynamiczna regulatora<br />
typu PI<br />
PI Proportional-Integral Controller<br />
λ S<br />
λ S<br />
Charakterystyka dla<br />
stanu ustalonego<br />
regulator typu P<br />
ε IAr<br />
P<br />
I<br />
Integration<br />
całkowanie<br />
Czas t<br />
Odpowiedź<br />
natychmiastowa<br />
k I = (λ S /ε IAr )<br />
P<br />
I<br />
Integration<br />
całkowanie<br />
38
Podstawowe układy regulacji w napędzie<br />
2.Układ regulacji prądu i prędkości silnika<br />
elektrycznego – prąd wytwarza moment<br />
napędowy<br />
zadana<br />
prędkość<br />
zadany<br />
prąd<br />
pomiar<br />
prądu<br />
pomiar<br />
prędkości<br />
PI<br />
Regulator<br />
prędkości<br />
PI<br />
Regulator<br />
prądu –<br />
(momentu)<br />
sygnał prądu<br />
sprzężenia<br />
zwrotne<br />
sygnał prędkości rzeczywistej<br />
Teoria sterowania odnosi się tylko do dynamiki – technika napędu „widzi” obiekty<br />
rzeczywiste a dynamika jest jednym z wielu elementów konstrukcji<br />
39<br />
czwa03.04.08
Prosty układ regulacji silnika prądu stałego<br />
Regulacja prądu i prędkości – szeregowe połączenie<br />
regulatorów R-RI<br />
Zadana<br />
prędkość<br />
PI regulatory – odpowiedź<br />
dynamiczna<br />
R<br />
Zadany<br />
prąd<br />
RI<br />
Czujnik<br />
prądu<br />
Czujnik<br />
prędkości<br />
PI<br />
Regulator<br />
prędkości<br />
PI<br />
Regulator<br />
prądu<br />
n<br />
Maszyna<br />
robocza<br />
Sprzężenie prądowe – sygnał prądu<br />
rzeczywistego (zmierzonego)<br />
Sprzężenie prędkościowe – sygnał<br />
prędkości rzeczywistej<br />
40
Charakterystyki mechaniczne – prędkość w funkcji prądu (momentu napędowego)<br />
Kształtowanie charakterystyk w układzie z szeregowym (”kaskadowym”)<br />
połączeniem regulatorów R and RI<br />
Dokładna stabilizacja prędkości<br />
– efekt działania regulatora<br />
prędkości R<br />
<br />
T d = I A A<br />
<br />
2<br />
I A<br />
I A<br />
-I Amax<br />
I Amax<br />
-I Amax<br />
I Amax3<br />
I Amax2 IAmax1<br />
I Amax<br />
Prąd (moment) ograniczony<br />
przez regulator prądu RI A do<br />
I Amax rezultat maksymalnego<br />
sygnału zadanego prądu<br />
Prąd ograniczony przez działanie regulatora<br />
prądu–RI A jako wynik szeregu wartości<br />
zadanych prądu I Amax<br />
„Nowe stopnie swobody” nastawianie prędkości i<br />
maksymalnego prądu w szerokich granicach.<br />
41
Prosty układ regulacji silnika prądu stałego<br />
Regulacja prądu i prędkości – szeregowe połączenie regulatorów<br />
Korzystne cechy:<br />
Regulacja w szerokim zakresie prędkości<br />
Ograniczenie prądu do zadanej wartości<br />
Korzystne cechy wynikające z regulacji prądu:<br />
Szybka odpowiedź prądu na wartość zadaną i skok obciążenia<br />
Zabezpieczenie źródła energii, przekształtnika, silnika i maszyny roboczej przed przeciążeniem<br />
(zwarciem) oraz nadmiernym momentem w stanach ustalonych i przejściowych<br />
PI regulatory – odpowiedź dynamiczna<br />
Zadana<br />
prędkość<br />
R<br />
Zadany<br />
prąd<br />
RI<br />
Czujnik<br />
prądu<br />
Czujnik<br />
prędkości<br />
PI<br />
PI<br />
n<br />
Maszyna<br />
robocza<br />
Regulator<br />
prędkości<br />
Regulator<br />
prądu)<br />
Prędkość<br />
zmierzona<br />
Prąd zmierzony<br />
DSP<br />
42
Podstawowe układy regulacji w napędzie<br />
3. Napęd elektryczny -układ regulacji drogi (położenia),<br />
prędkości i prądu - szeregowe połączenie regulatorów<br />
Realizacja mikroprocesorwa<br />
zadana<br />
prędkość<br />
zadany<br />
prąd<br />
pomiar<br />
prądu<br />
pomiar<br />
prędkości<br />
pomiar<br />
drogi<br />
PI(P)<br />
PI<br />
PI<br />
n<br />
Regulator<br />
położenia<br />
Regulator<br />
prędkości<br />
Regulator<br />
prądu-<br />
(momentu)<br />
sygnał prądu<br />
zadana<br />
droga -<br />
położenie<br />
sygnał prędkości<br />
sygnał drogi<br />
SERWOMECHANIZM<br />
43
STEROWANIE<br />
45
Napęd nawrotny - czteroćwiartkowy<br />
46
AC maszyny – wirujące wirniki i pola<br />
Maszyna indukcyjna<br />
wirnik i stojan uzwojone<br />
Wirnik np. klatkowy lub<br />
dostęp do wirnika przez<br />
pierścienie trójazowe<br />
Maszyna synchroniczna<br />
Wirnik i stojan uzwojone<br />
dostęp do wirnika przez<br />
pierścienie – wzbudzenie<br />
prądem stałym<br />
47
Jeżeli N-S bieguny zbudowane z magnesów trwałych – to niepotrzebne<br />
pierścienie do zasilania wzbudzenie bo brak uzwojenia wzbudzenia<br />
wówczas wirnik jest bardzo lekki<br />
48
Bezszczotkowa trójfazowa maszyna z magnesami<br />
trwałymi zamiast uzwojeń - magnesy<br />
V<br />
W<br />
N<br />
S<br />
U, V, W –<br />
uzwojenia<br />
stojana<br />
Magnesy wirujące<br />
U<br />
49
Musi być zachowana odpowiednia kolejność i czas<br />
włączenia zaworów sterujących prądem stojana<br />
Łącznik „statyczny” – jako łącznik i regulator prądu<br />
(modulacja szerokości impulsów)<br />
Stojan<br />
N<br />
S<br />
Wirnik z<br />
magnesami<br />
trwałymi<br />
Komutator<br />
statyczny<br />
Bezszczotkowy silnik<br />
„prądu stałego”<br />
BLDC<br />
50
„Brushless DC motor”- silnik bezszczotkowy prądu stałego<br />
– prąd tylko w dwóch fazach<br />
„Prąd stały”<br />
Łącznik „statyczny” – jako łącznik i regulator prądu (modulacja<br />
szerokości impulsów)<br />
stojan<br />
N<br />
S<br />
Wirnik z<br />
magnesami<br />
trwałymi<br />
Komutator<br />
statyczny -<br />
tranzystorowy<br />
Bezszczotkowy silnik<br />
„prądu stałego”<br />
BLDC<br />
51
Musi być zachowana odpowiednia kolejność faz i czas<br />
włączenia zaworów sterujących prądem stojana<br />
”The static system is a switch and controller”<br />
stojan<br />
N<br />
S<br />
Komutator<br />
Bezszczotkowy silnik<br />
„prądu stałego”<br />
BLDC<br />
52
Schemat ideowo-blokowy napędu silnikiem bezszczotkowym o<br />
magnesach trwałych („BLDC”)<br />
Źródło<br />
napięcia<br />
stałego –<br />
Źródło<br />
energii<br />
Pomiar<br />
położenia<br />
biegunów<br />
ENCODer<br />
Przekształtnik PT pełni dwie role:<br />
a) jest komutatorem przełączającym prąd w stojanie<br />
b) Jest wzmacniaczem mocy regulującym napięcie doprowadzone do stojana<br />
Pomiar położenia biegunów pozwala na wyznaczenie chwil włączenia tranzystorów tak<br />
aby moment silnika był największy<br />
53
Analogia do maszyny obcowzbudnej prądu stałego<br />
Jeżeli w bezszczotkowym silniku będzie przełączanie prądu nie we właściwej chwili<br />
to będzie malał moment napędowy przy tym samym prądzie<br />
i A (t)<br />
L A , R A , J A<br />
U A (t)<br />
I F (t)<br />
Field Ψ F<br />
U f (t)<br />
α<br />
Ψ A<br />
T d (t)<br />
(t)<br />
T L (t)<br />
J L<br />
MR<br />
Położenie<br />
szczotek<br />
niewłaściwe<br />
Prąd twornika w przestrzeni jest<br />
nieoptymalny – moment jest zredukowany<br />
proporcjonalnie do sinα<br />
Ψ A t<br />
= C A Ψ F t sinα<br />
Normalnie α = (/2)<br />
sinα = 1<br />
54
Maszyna z komutatorem mechanicznym to technika z początków 20 wieku<br />
Maszyna z komutatorem elektronicznym - regulatorem to technika 21 wieku<br />
BLDC<br />
ENCODer<br />
Sterowanie silnika z magnesami trwałymi „Materiał” poza programem<br />
55
BLDC<br />
V dc<br />
n ref<br />
-<br />
Θ<br />
Regulator<br />
Prędkości<br />
PI<br />
i sdref<br />
i sqref<br />
-<br />
-<br />
Regulator<br />
Prądu<br />
PI<br />
Regulator<br />
Prądu<br />
PI<br />
V sqref<br />
d,q<br />
α,β<br />
V sαref<br />
V sβref<br />
SVPWM<br />
Sa<br />
Sb<br />
Sc<br />
Przekształtnik<br />
3 fazowy<br />
n<br />
i sq<br />
d,q<br />
V sdref<br />
Va Vb Vc<br />
i sα<br />
α,β<br />
ia<br />
i sd<br />
i sβ<br />
ib<br />
α,β<br />
a,b,c<br />
Czujnik położenia i<br />
prędkości<br />
MS<br />
Sterowanie napędem elektrycznym pojazdu z silnikiem o<br />
magnesach trwałych – (przykład z pracy dyplomowej)<br />
Sterowanie silnika z magnesami trwałymi „Materiał” poza programem<br />
56
N<br />
S<br />
BLDC – Brushless DC („bezszczotkowy”)<br />
57
Nowoczesne regulowane<br />
elektronarzędzia – napęd z<br />
maszyną typu BLDC<br />
N<br />
S<br />
58
Przykład nowoczesnej maszyna z magnesami trwałymi o polu osiowym<br />
Stator<br />
Airgap<br />
N<br />
N<br />
S<br />
S<br />
N<br />
N<br />
Magnets<br />
Magnets<br />
S<br />
9cm<br />
S<br />
Stator windings<br />
i<br />
s<br />
s<br />
40kW<br />
60
Maszyna o<br />
podwyższonej<br />
częstotliwości – duża<br />
liczba biegunów –<br />
łatwość konstrukcji<br />
– podwyższona<br />
częstotliwość<br />
indukowanego<br />
napięcia<br />
61
Przekształtnik może pracować z dużą częstotliwością – nie ma<br />
problemów komutatora mechanicznego<br />
U DC<br />
Silnik bezwałowy z magnesami trwałymi o polu osiowym<br />
1. Czujnik położenia wirnika np. enkoder<br />
Jak sterować przekształtnikiem?<br />
Wymagana informacja o<br />
położeniu wirnika.<br />
2. Metody bezczujnikowe<br />
62
31-0<br />
czwa<br />
rotor<br />
rotor<br />
stojan<br />
ermanent<br />
permanent<br />
magnets<br />
magnets<br />
stator<br />
windings<br />
stator<br />
Przykład maszyny z magnesami<br />
trwałymi – pracującej jak generator lub<br />
jako silnik - moc 40 kW – masa<br />
wielokrotnie mniejsza od generatora<br />
synchronicznego<br />
63
Źródło<br />
napięcia<br />
stałego –<br />
Źródło<br />
energii<br />
REGULATOR<br />
KOMUTATOR<br />
& REGULATOR<br />
KOMUTATOR<br />
/twornik<br />
Różnica pomiędzy konstrukcjami<br />
napędów:<br />
W napędzie z maszyną<br />
komutatorową występuje<br />
komutator mechaniczny a<br />
przekształtnik jest tylko<br />
regulatorem<br />
W maszynie bezszczotkowej<br />
przekształtnik jest<br />
komutatorem i regulatorem<br />
64
Aby taki napęd elektryczny mógł być zastosowany musi być bardzo lekki i sprawny<br />
Jaki napęd jest odpowiedni?<br />
(jeśli dostępne będą materiały na magnesy trwałe to<br />
silniki z magnesami trwałymi wkrótce zdominują rynek)<br />
65
”From mind to market”<br />
Zrealizuj pracę dyplomową wg pomysłu, który w<br />
przyszłości wdrożysz !!<br />
Wydział Elektryczny ma bardzo liczną kadrę o<br />
zróżnicowanych specjalizacjach<br />
66













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
