L - Transportu
L - Transportu
L - Transportu

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ<br />
z. 78 Transport 2011<br />
Marek Szczotka<br />
Wydzia Zarzdzania i Informatyki<br />
Akademia Techniczno-Humanistyczna<br />
MODELOWANIE I ANALIZA UKADU<br />
DO OBSUGI MODUÓW INSTALOWANYCH<br />
NA DNIE MORZA<br />
Rkopis dostarczono, marzec 2011<br />
Streszczenie: W pracy przedstawiono model ukadu przeznaczonego do instalacji offshore moduów<br />
niezbdnych do transportowania ropy i gazu z odwiertów w dnie morskim. System jest montowany na<br />
specjalnych jednostkach pywajcych, wyposaonych w ukady dynamicznego pozycjonowania.<br />
Jednym z istotniejszych elementów ukadu jest system AHC (Active Heave Compensation), który<br />
kompensuje ruchy statku spowodowane falowaniem. Zastosowano uproszczony ukad pneumatycznohydrauliczny,<br />
wraz z odpowiednimi algorytmami sterowania prac wcigarek. adunek jest<br />
opuszczany na dno za pomoc wcigarki z kompensacj. Zamodelowano równie dodatkowe liny<br />
prowadzce adunek. Przedstawiono wyniki przykadowych oblicze numerycznych, dla ukadu<br />
pracujcego w zadanych warunkach, przy wczonym oraz wyczonym ukadzie prowadzenia<br />
moduu w trakcie instalacji.<br />
Sowa kluczowe: urzdzenia offshore, instalacja moduów, modelowanie<br />
1. SYSTEMY DO TRANSPORTU MODUÓW (MHS)<br />
Nieustajcy rozwój gospodarek wielu krajów wiata generuje zwikszone<br />
zapotrzebowanie na surowce energetyczne. Dlatego ju od kilku dekad znaczca cz<br />
energii pochodzi ze róde znajdujcych si pod dnami mórz i oceanów. Ich wydobycie<br />
staje si coraz bardziej kosztowne, poniewa istniejce zasoby w akwenach o maych<br />
gbokociach (do kilkuset metrów) s ju eksploatowane od duszego czasu. Nowe zoa<br />
ropy i gazu ziemnego, dla których powstaje obecnie wikszo infrastruktury zwizanej<br />
z ich eksploatacj, charakteryzuj si wikszymi wymaganiami w stosunku do systemów<br />
budowanych w minionych dekadach: du gbokoci (2000m i wicej), wysokim stanem<br />
mórz i oceanów, przy których prace wydobywcze musz by prowadzone w sposób cigy,<br />
a take silnymi prdami morskimi i niskimi temperaturami (obszary arktyczne). Coraz<br />
bardziej ekstremalne warunki wymagaj coraz wikszych nakadów przy jednoczesnym<br />
skróceniu czasu eksploatacji pól (s one czsto coraz mniejsze i coraz bardziej<br />
rozproszone) oraz obsugujcych ich urzdze. Czynnik ten bdzie w znacznym stopniu
86 Marek Szczotka<br />
wpywa midzy innymi na ceny paliw w nastpnych latach. Z drugiej strony, te trudne<br />
warunki pracy wymuszaj szybki rozwój technologii rodków transportu i maszyn,<br />
niezbdnych do funkcjonowania brany wydobywczej. Bezawaryjna praca tych urzdze,<br />
niejednokrotnie w trudnych warunkach pogodowych (silne falowanie, prdy morskie oraz<br />
wiatr), wymaga specjalnego podejcia do zagadnie niezawodnoci i bezpieczestwa [1-3].<br />
Czstym rozwizaniem przy rónorodnych pracach przeadunkowych jest stosowanie<br />
urawi offshore, montowanych na statkach i platformach. Maszyny te nale do<br />
najbardziej efektywnych i uniwersalnych, charakteryzuj si licznymi zaletami. Jednak nie<br />
zawsze tego typu urzdzenie jest najodpowiedniejsze do wykonania pewnych prac, poza<br />
tym ich cena jest bardzo wysoka. Ponadto urawie czsto w tym samym czasie wykonuj<br />
inne zadania, wic zachodzi potrzeba uycia drugiego dwigu. W artykule przedstawiono<br />
dedykowany system do opuszczania i podnoszenia moduów uywanych przy eksploatacji<br />
morskich rurocigów na polach naftowych i gazowych. Moe on stanowi alternatyw dla<br />
urawi, dziki dostosowaniu konstrukcji do specyfiki prac instalacyjnych. W szczególnoci<br />
moe umoliwia prowadzenie adunku za pomoc ukadów dodatkowych lin i wcigarek,<br />
co jest trudne stosujc klasyczny uraw.<br />
W pracy krótko omówiono model systemu MHS (Multi-purpose Handling System),<br />
który jest wyposaony w ukad wcigarek z systemami AHC, a take zawiera wcigarki<br />
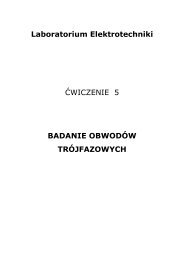
pomocnicze, stosowane do prowadzenia adunku. Poniej na Rys. 1 przedstawiono widok<br />
urzdzenia.<br />
wcigarki<br />
kabinasterowania<br />
moonpool<br />
wózektransportowy<br />
Rys. 1. Widok systemu MHS od strony torowiska umoliwiajcego poziomy transport moduów<br />
(urzdzenie zaprojektowane i wyprodukowane przez AXTech AS)<br />
Struktura nona („wiea”) stanowi rodzaj konstrukcji ramowej, na której zamocowano<br />
wcigarki dla lin prowadzcych, gówn wcigark z ukadem AHC, kabin sterownicz<br />
oraz wiele innych komponentów dodatkowych (krki, szyny mechanizmu jazdy ramy<br />
prowadzcej adunek, cigi komunikacyjne, oprzyrzdowanie sterujce). MHS zosta
Modelowanie i analiza ukadu do obsugi moduów instalowanych na dnie morza 87<br />
zamontowany na statku uczestniczcym w pracach instalacyjnych i obsudze wydobycia<br />
ropy i gazu, przy czym do stosowania omawianego systemu niezbdny jest specjalny kana<br />
w kadubie statku (moonpool). Moduy s opuszczane i podnoszone z dna przez ten kana,<br />
posiadajcy midzy innymi waciwoci eliminujce efekty dynamiczne pojawiajce si<br />
podczas przechodzenia adunku przez lustro wody. Wykonanie podobnej operacji za<br />
pomoc klasycznego urawia offshore (a wic w przypadku kiedy adunek jest opuszczany<br />
przez lustro wody poza obrysem kaduba), wymaga znacznie wikszego zapasu udwigu<br />
urawia, poniewa operacje takie cechuj si znacznie wikszymi siami dynamicznymi.<br />
Zatem, przy tych samych warunkach pogodowych, prezentowany MHS wymaga<br />
mniejszych nonoci ni wymagaby uraw pokadowy. Moduy s transportowane po<br />
pokadzie statku z hangaru (znajdujcego si w innej czci pokadu) do wiey,<br />
wykorzystujc specjalne wózki i system szyn.<br />
wcigarkaAHC35t<br />
HPU<br />
Rys. 2. MHS od strony generatora i wcigarki z ukadem automatycznej kompensacji<br />
Przedstawiony w pracy ukad jest przeznaczony do opuszczania moduów o wymiarach<br />
6.5m x 6.5m x 8m, na gboko do 1500m. Maksymalna zdolno kompensacji falowania<br />
zostaje osignita przy wysokoci fal 5.0m. Cakowita masa wasna urzdzenia to 120t<br />
(wraz z osprztem i linami). Centraln czci systemu jest specjalnie zaprojektowany<br />
ukad napdowy dla wcigarek (Rys. 2): gównej z ukadem AHC o udwigu nominalnym<br />
35t, dwóch specjalnych dla utrzymania staego nacigu lin prowadzcych modu w trakcie<br />
podnoszenia, obsugujcej ram prowadzc modu przez kadub statku (zabezpieczenie<br />
przez uderzeniami o ciany boczne) oraz pomocnicze dla obsugi pomostu zamykajcego<br />
moonpool i kurtyn bocznych. Podstawow funkcj napdu wcigarki z systemem AHC jest<br />
zapobieganie przed uderzeniem adunku o dno w czasie jego podnoszenia i opuszczania.<br />
Wcigarka kompensuje ruchy nurzania i koysania statku spowodowane falowaniem,<br />
poprzez odpowiedni dobór dugoci liny. Klasyczny ukad AHC wcigarki z napdem<br />
elektrycznym opisano midzy innymi w pracy [4].<br />
W niniejszej pracy przedstawiono model matematyczny umoliwiajcy symulacj<br />
jednej z moliwych operacji wykonywanych za pomoc MHS. Skupiono si na operacji<br />
podnoszenia i opuszczania adunku przy dodatkowym istnieniu lin prowadzcych.
88 Marek Szczotka<br />
W analizie uwzgldniono efekty dynamiczne wywoane zarówno ruchem unoszenia statku<br />
w wyniku jego ruchu podczas falowania morza, ale take oddziaywania lin. Wymuszenia<br />
pochodz take od si hydrodynamicznych spowodowanych prdkociami czsteczek<br />
wody (od falowania i prdów morskich).<br />
2. PODSTAWOWE ZAOENIA I OPIS MODELU UKADU<br />
Model matematyczny, umoliwiajcy symulacj pracy ukadu i ocen wpywu<br />
wybranych parametrów na zachowanie si adunku i powstajce w ukadzie siy<br />
dynamiczne, zbudowano uwzgldniajc ponisze zaoenia:<br />
ruch statku powstay w wyniku falowania morskiego traktuje si jako znany<br />
i opisany dowoln funkcj zalen od czasu i parametrów stanu morza<br />
i jednostki pywajcej,<br />
nie uwzgldnia si podatnoci struktury nonej wiey oraz pokadu statku,<br />
napd wcigarek lin prowadzcych zapewnia wzgldnie stay nacig lin,<br />
realizowany przez dostarczenie staego cinienia oleju do silników,<br />
wcigarka gówna posiada hybrydowy ukad napdowy (hydro-pneumatyczny),<br />
natomiast prdko obrotowa bbna jest wymuszana kinematycznie,<br />
uwzgldnia si podatno lin prowadzcych oraz podatno gównej liny nonej,<br />
poprzez jej dyskretyzacj metod sztywnych elementów skoczonych (SES),<br />
adunek traktuje si jako bry sztywn o szeciu stopniach swobody,<br />
prowadnice adunku mog by traktowane jako elementy sprysto-tumice<br />
o dowolnie definiowalnych charakterystykach.<br />
Ruch statku, na którym zamontowane jest urzdzenie, jest okrelony jeli znane s<br />
skadowe wektora q D , bdce wspórzdnymi uogólnionymi statku:<br />
D<br />
<br />
<br />
s<br />
z<br />
<br />
q f t ,RAO H , T<br />
(1)<br />
gdzie:<br />
H S , T z - charakterystyczna wysoko i okres fali,<br />
q <br />
T<br />
D xD<br />
yD<br />
zD<br />
D D D<br />
- wspórzdne okrelajce ruch statku,<br />
xD<br />
xD<br />
t ,..., D<br />
D<br />
t , gdzie x D, yD,<br />
zD<br />
s przemieszczeniami jednostki<br />
wzdu osi ukadu bezwadnociowego, natomiast kty D , D , D<br />
s<br />
ktami obrotu Eulera ZYX wzgldem tego ukadu,<br />
RAO - funkcje przejcia statku (Response Amplitude Operators).<br />
Schemat ukadu przedstawiono na rysunku 3.
Modelowanie i analiza ukadu do obsugi moduów instalowanych na dnie morza 89<br />
wiea<br />
kreklinygównej<br />
profilfali<br />
{D}<br />
a <br />
y<br />
moonpool<br />
v <br />
ruchczstekwody<br />
{L}<br />
linagówna<br />
linyprowadzce<br />
modu<br />
z {0}<br />
x<br />
dno<br />
Rys. 3. Schemat ukadu MHS<br />
Poniewa zaoono, e konstrukcja nona („wiea”) jest nieodksztacalna, trajektorie<br />
ruchu krków mona wyznaczy stosujc przeksztacenia jednorodne. Zatem ruch<br />
elementu liny stycznego do krka zamocowanego na wiey mona okreli za pomoc<br />
operacji [5]:<br />
(0)<br />
r T <br />
<br />
(2)<br />
s, l D t rs,<br />
l<br />
(0)<br />
gdzie: r<br />
s,l<br />
- wspórzdne punktu zejcia liny z krka w ukadzie globalnym { 0}<br />
,<br />
r s , l const - znane wspórzdne w ukadzie statku {D}<br />
,<br />
T D - macierz transformacji jednorodnej wspórzdnych z ukadu {D}<br />
do { 0}<br />
.<br />
Macierz transformacji jednorodnych jest zdefiniowana zgodnie z konwencj któw<br />
ZYX Eulera, w sposób podany w [5].<br />
Liny prowadzce adunek, jak równie gówn lin non, dyskretyzowano za pomoc<br />
metody sztywnych elementów skoczonych, która szczegóowo opisana jest w monografii<br />
(l)<br />
[6]. Pojedynczy sztywny element skoczony ses i jest opisany przez wspórzdne<br />
uogólnione (Rys. 4):<br />
i<br />
( l)<br />
i<br />
i<br />
( l)<br />
i<br />
i<br />
( l)<br />
i<br />
~( l)<br />
qi<br />
<br />
<br />
x<br />
( l)<br />
i<br />
y<br />
( l)<br />
i<br />
z<br />
( l)<br />
i<br />
<br />
( l)<br />
i<br />
<br />
( l)<br />
i<br />
<br />
( l)<br />
T<br />
i<br />
( l)<br />
( l)<br />
( l)<br />
gdzie: x , y , z - przemieszczenia elementu i w ukadzie {D}<br />
,<br />
, , - kty obrotu Eulera elementu wzgldem ukadu {D}<br />
,<br />
(3)
90 Marek Szczotka<br />
l - numer liny prowadzcej adunek (w pracy zakadano l 1, 2 ).<br />
a)<br />
( l)<br />
sesi<br />
1<br />
( )<br />
y ˆ l<br />
i<br />
( )<br />
(l)<br />
z ˆ l<br />
i est<br />
( ) i<br />
x ˆ l<br />
i<br />
(l)<br />
ses i<br />
( )<br />
yˆ l<br />
i<br />
( )<br />
{} l<br />
( )<br />
zˆ l i<br />
i<br />
( )<br />
xˆ l<br />
i<br />
( l)<br />
( )<br />
esti<br />
1 yˆ l<br />
i<br />
1<br />
( l)<br />
( )<br />
zˆ l sesi<br />
1<br />
i 1<br />
( )<br />
xˆ l<br />
i<br />
1<br />
b)<br />
( )<br />
zˆ l<br />
i<br />
( )<br />
z ˆ l<br />
i<br />
~ ( l)<br />
r<br />
L,<br />
i<br />
( )<br />
xˆ l<br />
i<br />
( l)<br />
sesi<br />
1<br />
~ ( l)<br />
r i<br />
x<br />
i<br />
( )<br />
{} l<br />
i<br />
( )<br />
yˆ l<br />
i<br />
(l)<br />
ses i<br />
( )<br />
zˆ l i 1 ( )<br />
{} l<br />
i1<br />
( )<br />
xˆ l1 i <br />
( )<br />
ˆ l<br />
~ ( l)<br />
r<br />
R,<br />
i1<br />
( )<br />
y ˆ l<br />
i<br />
~ ( l )<br />
( l)<br />
i<br />
x<br />
z<br />
i<br />
, y<br />
( l)<br />
i<br />
y<br />
{0}<br />
( )<br />
yˆ l1 i <br />
, z<br />
( l)<br />
i<br />
x<br />
Rys. 4. Dyskretyzacja metod sztywnych elementów skoczonych<br />
(l)<br />
a) sztywny element skoczony ses i fragmentu liny l (przed deformacj)<br />
( )<br />
b) ukad po deformacji: odksztacenie liniowe ~ l<br />
~ ( )<br />
i ktowe l<br />
elementu<br />
(l)<br />
Deformacja elementu sprysto-tumicego est i umoliwia, po przyjciu<br />
odpowiedniego modelu materiau, wyznaczenie si i momentów si wystpujcych<br />
( l)<br />
(l)<br />
w poczeniu elementów sesi<br />
1 i ses i liny. Uzewntrznienie si i momentów si<br />
wynikajcych z odksztace elementów, w odrónieniu od obliczania skadników równa<br />
ruchu pochodzcych od energii potencjalnej odksztace sprystych, pozwala na<br />
modelowanie dowolnych, nieliniowych charakterystyk sprystych i sprystoplastycznych<br />
materiau [7].<br />
Transformacji wspórzdnych z ukadu lokalnego, zwizanego ze sztywnym elementem<br />
(l)<br />
skoczonym ses , dokonuje si stosujc podobnie przeksztacenie:<br />
gdzie: x y z 1 T<br />
0 <br />
0<br />
i<br />
r -<br />
( l)<br />
i, loc<br />
<br />
( l<br />
<br />
i,<br />
)<br />
<br />
0<br />
)<br />
loc<br />
0<br />
( l)<br />
i,<br />
loc<br />
r i<br />
i,<br />
loc<br />
i,<br />
loc<br />
i<br />
(l)<br />
est i<br />
( l)<br />
( ) ( ) ( ) ( )<br />
0 ( ) ~<br />
l l l l<br />
r TD qD<br />
t Ti<br />
qi<br />
r<br />
Bi<br />
r<br />
(4)<br />
( l)<br />
i,<br />
loc<br />
T<br />
wektor wspórzdnych w ukadzie<br />
bezwadnociowym,<br />
r x y z 1 - wektor wspórzdnych w ukadzie lokalnym,<br />
<br />
~ ( l)<br />
~ ( l<br />
i qi<br />
T -<br />
(l)<br />
macierz transformacji z ukadu lokalnego ses i<br />
do ukadu statku {D}<br />
.
Modelowanie i analiza ukadu do obsugi moduów instalowanych na dnie morza 91<br />
Równania ruchu liny prowadzcej l wyprowadzono z równa Lagrange’a II rodzaju:<br />
V<br />
D<br />
(5)<br />
( l)<br />
( l)<br />
k<br />
Q<br />
( l)<br />
( l)<br />
k<br />
qk<br />
q<br />
k<br />
gdzie:<br />
( l)<br />
d T<br />
T<br />
<br />
k<br />
<br />
( l)<br />
( l)<br />
dt q<br />
k<br />
qk<br />
- operator Lagrange’a,<br />
E , V - energia kinetyczna i potencjalna,<br />
D - funkcja dyssypacji energii,<br />
Q - niepotencjalna sia uogólniona,<br />
<br />
<br />
(l)<br />
k<br />
k 0,...,n l<br />
, - n l jest liczb elementów skoczonych.<br />
(l)<br />
Równania ruchu elementu ses mona zapisa w postaci:<br />
gdzie:<br />
<br />
( l)<br />
k<br />
<br />
l<br />
l l l l<br />
q<br />
~ ( )<br />
k<br />
F q<br />
~ ( )<br />
k<br />
q<br />
~ ( )<br />
, ,<br />
k<br />
, q<br />
~ ( )<br />
k<br />
, q<br />
~ ( )<br />
<br />
1<br />
k 1<br />
A<br />
k<br />
t , q<br />
<br />
( l)<br />
<br />
( l)<br />
Mk<br />
0<br />
A<br />
k<br />
<br />
( l)<br />
<br />
- macierz mas,<br />
<br />
0 Ak<br />
<br />
<br />
<br />
( l )<br />
( l ) ( l<br />
,<br />
) ,<br />
( l<br />
M )<br />
k<br />
diag mk<br />
mk<br />
mk<br />
- podmacierz 3x3 o staych elementach,<br />
(l) ( l)<br />
( l)<br />
( l)<br />
(l)<br />
m<br />
k<br />
, I<br />
x, k<br />
, I<br />
y,<br />
k<br />
, Iz,<br />
k<br />
- masa i momenty bezwadnoci ses<br />
k<br />
,<br />
( l)<br />
( l)<br />
( l)<br />
( l)<br />
( l)<br />
podmacierz 3x3 o zmiennych elementach<br />
Ak<br />
Ak<br />
<br />
k<br />
, k<br />
, k<br />
-<br />
(l)<br />
(l)<br />
(l)<br />
(zalenych od , , ),<br />
(l)<br />
Fk<br />
<br />
k<br />
D<br />
k<br />
<br />
wektor prawych stron zawierajcy skadowe<br />
od si uogólnionych, ruchu unoszenia, si<br />
cikoci itp.<br />
<br />
(l)<br />
Warunki pracy urzdzenia okrelaj, e element ses<br />
n l<br />
jest zamocowany na dnie morza.<br />
W modelu realizuje si to poprzez uwzgldnienie równania:<br />
<br />
( l)<br />
( l)<br />
( l)<br />
r B const . (7)<br />
n , 0 n<br />
rn<br />
, loc<br />
l<br />
l<br />
<br />
(l)<br />
Równanie (7) reprezentuje poczenie kuliste, czce ses<br />
n l<br />
z dnem w punkcie<br />
( )<br />
o wspórzdnych lokalnych okrelonych w r l<br />
. n l , loc<br />
( l)<br />
Element ses 0 jest obciony si w linie prowadzcej. Ruch bbna wcigarki<br />
(l)<br />
prowadzcej okrelony jest wspórzdn uogólnion GW , któr wyznacza si z równania:<br />
<br />
( l)<br />
( l)<br />
( l)<br />
( l)<br />
( l)<br />
I T F r<br />
(8)<br />
GW<br />
GW<br />
l<br />
const<br />
l<br />
GW<br />
k<br />
(6)<br />
gdzie:<br />
(l)<br />
IGW<br />
- masowy moment bezwadnoci bbna wcigarki,
92 Marek Szczotka<br />
(l)<br />
T const - stay moment napdowy,<br />
r - promie podziaowy,<br />
(l)<br />
GW<br />
(l)<br />
Fl<br />
- sia w linie l .<br />
<br />
Zakada si, i adunek jest bry sztywn o szeciu stopniach swobody. Jego ruch jest<br />
okrelony w ukadzie bezwadnociowym przez równania ruchu wyprowadzone równie<br />
z równa Lagrange’a II rodzaju:<br />
<br />
A Lq L FL<br />
t,<br />
q L , q<br />
L <br />
(9)<br />
( L)<br />
A , ( L)<br />
( L)<br />
( L)<br />
T<br />
a <br />
<br />
k , j<br />
trB k<br />
H B j ,<br />
<br />
<br />
(L)<br />
H jest macierz pseudo-masow,<br />
q x y z ,<br />
( L)<br />
gdzie: L a k<br />
, j k,<br />
j 1,..., 6<br />
L<br />
<br />
L<br />
L<br />
( L)<br />
( L)<br />
k<br />
L<br />
L<br />
L<br />
T<br />
L<br />
( L)<br />
<br />
k<br />
<br />
B (L)<br />
B , B - macierz transformacji z {L}<br />
do { 0}<br />
,<br />
q<br />
F L - wektor prawych stron równa ruchu.<br />
<br />
adunek opuszczany jest za pomoc liny gównej. Aby ograniczy wpyw prdów<br />
morskich, stosuje si prowadzenie adunku z wykorzystaniem dodatkowych lin, Rys. 5.<br />
<br />
prdy morskie,<br />
fale<br />
lina<br />
prowadzca<br />
(1)<br />
F<br />
l<br />
lina nona<br />
{ 0}<br />
modu<br />
ẑ<br />
L<br />
ŷ<br />
L<br />
przeguby kuliste<br />
xˆ<br />
L<br />
(2)<br />
F<br />
l<br />
prowadnica<br />
lina<br />
prowadzca<br />
<br />
<br />
Rys. 5. adunek (modu) opuszczany przy wykorzystaniu lin prowadzcych<br />
<br />
W celu okrelenia si dziaajcych na adunek oraz lin l , zaoono, e prowadnice<br />
posiadaj sztywno i tumienie w kierunkach osi xˆ L oraz ẑ L . Obliczajc wspórzdne<br />
(l)<br />
pocztku i koca ses i bdcego w kontakcie z prowadnic:<br />
<br />
( l)<br />
( l)<br />
( l)<br />
r <br />
T<br />
a, i Bi<br />
ri<br />
, a,<br />
loc<br />
xa<br />
ya<br />
za<br />
1<br />
(10.1)<br />
( l)<br />
( l)<br />
( l)<br />
r B r x y z 1 T<br />
(10.2)<br />
b, i i i,<br />
b,<br />
loc<br />
<br />
( l)<br />
l<br />
gdzie: r <br />
0 0 T ( l)<br />
l<br />
, 0 0 T<br />
i,<br />
a,<br />
loc<br />
( l )<br />
i<br />
2<br />
1<br />
i,<br />
b,<br />
loc<br />
b<br />
b<br />
( l )<br />
i<br />
2<br />
1<br />
r ,<br />
b
Modelowanie i analiza ukadu do obsugi moduów instalowanych na dnie morza 93<br />
<br />
oraz zakadajc wspórzdn y L, 0 okrelon przez:<br />
y<br />
L,0<br />
( L)<br />
( L)<br />
rk<br />
gdzie: 0<br />
1 0 0,<br />
(L)<br />
r<br />
k<br />
- wektor wspórzdnych prowadnicy w ukadzie }<br />
( L)<br />
(L)<br />
k 1,..., , n - liczba prowadnic,<br />
<br />
<br />
n p<br />
p<br />
B<br />
(11)<br />
{L ,<br />
mona wyznaczy siy wynikajce z odksztace prowadnicy z zalenoci:<br />
gdzie:<br />
l)<br />
xc<br />
mxb<br />
xa<br />
<br />
xa<br />
l)<br />
zc<br />
mzb<br />
za<br />
<br />
za<br />
( ,<br />
( ,<br />
yL,0<br />
ya<br />
m ,<br />
y y<br />
b<br />
a<br />
( l)<br />
c,<br />
x,<br />
k<br />
F<br />
( l)<br />
c,<br />
z,<br />
k<br />
F<br />
( l)<br />
k,<br />
z<br />
<br />
<br />
L,0<br />
( l)<br />
c<br />
( l)<br />
c<br />
<br />
<br />
c x x<br />
(12.1)<br />
( l)<br />
k,<br />
z<br />
c z z<br />
(12.2)<br />
x L, 0, zL,0<br />
- wspórzdne otrzymane z zalenoci (11) zakadajc odpowiedni wersor<br />
w operatorze zwajcym ,<br />
( l)<br />
( l)<br />
c c - wspóczynniki sztywnoci.<br />
k, x,<br />
k,<br />
z<br />
<br />
W pracy zaoono, i siy hydrodynamiczne mog by opisane zgodnie z równaniem<br />
Morisona [8]. Zaoenie to jest suszne zarówno dla lin jak i samego adunku, jeli wymiar<br />
charakterystyczny jest co najmniej piciokrotnie mniejszy od dugoci fali [9].<br />
Równania ruchu caego ukadu, wraz z równaniami wizów, zapisano w formie ukadu<br />
równa róniczkowych:<br />
<br />
Aq<br />
DR Ht,<br />
q,<br />
q<br />
<br />
T<br />
(13)<br />
D q<br />
G t,<br />
q,<br />
q<br />
gdzie: A diag A (1)<br />
, A (2)<br />
, I (1)<br />
GW , I (2)<br />
GW<br />
, A ( l)<br />
~<br />
L, <br />
( l ) ~ ( l<br />
diag A<br />
)<br />
0<br />
,..., A<br />
<br />
T<br />
T<br />
(1) (2) (1)<br />
q q GW<br />
T<br />
T T<br />
( l)<br />
l<br />
l<br />
q<br />
~<br />
... q<br />
~ <br />
0<br />
n<br />
,<br />
l<br />
(2)<br />
GW<br />
T<br />
T<br />
L<br />
<br />
L,0<br />
A ,<br />
q q - wektor wspórzdnych uogólnionych,<br />
q<br />
<br />
<br />
H - wektor prawych stron równa ruchu,<br />
<br />
(2)<br />
T<br />
z<br />
(1) (1) (1) (2) (2)<br />
R Rx<br />
Ry<br />
Rz<br />
Rx<br />
Ry<br />
R - wektor nieznanych reakcji wizów,<br />
D, G - macierze wspóczynników równa wizów.<br />
<br />
Równania (13) cakowano metod Rungego-Kutty IV rzdu ze staym krokiem<br />
cakowania. Warunki pocztkowe zagadnienia dynamiki wyznaczano metod Newtona<br />
rozwizujc ukad równa nieliniowych w zadaniu statyki.<br />
<br />
nl
94 Marek Szczotka<br />
3. PRZYADOWE SYMULACJE NUMERYCZNE<br />
W oparciu o wyprowadzony model matematyczny ukadu zbudowano odpowiedni<br />
program komputerowy wykorzystujc rodowisko programistyczne Microsoft Visual C++.<br />
Podstawowe dane zaoone do oblicze przedstawiono w Tabeli 1.<br />
Przyjte wymuszenie statku w kierunku pionowym i wzdunym (ruchy nurzania<br />
i oscylacji wzdunych) jest opisane prostymi funkcjami harmonicznymi, co odpowiada<br />
przypadkowi fali regularnej (Rys. 6 a). Kty obrotu statku przyjto jako równe zeru.<br />
Zaoono równie brak wymuszenia ruchu bbna wcigarki gównej (dugo liny<br />
odwinitej z bbna nie zmienia si).<br />
Na dynamik adunku oddziauj, oprócz wymusze spowodowanych ruchem statku<br />
i/lub nawijaniem liny na bben gównej wcigarki, siy hydrodynamiczne. Przyjto, e<br />
prdko czstek wody spowodowana pywami wynosi: v c na powierzchni akwenu<br />
i maleje liniowo do zera przy powierzchni dna. Dodatkowe zmiany prdkoci wody na<br />
danej gbokoci wynikaj z ruchu orbitalnego czsteczek, wywoanego falowaniem.<br />
Uwzgldniono take siy hydrodynamiczne dziaajce na liny prowadzce i non.<br />
Tablica. 1<br />
Podstawowe parametry modelu przyjte w obliczeniach<br />
Parametr Warto Parametr Warto<br />
( l)<br />
masa adunku m L<br />
4000kg nacig lin F , l 1, 2<br />
16.2kN<br />
l,<br />
nom<br />
gboko d 400m prdko prdu morza v c<br />
wysoko fali<br />
wspóczynnik oporu<br />
hydrodynamicznego adunku<br />
H s<br />
1.0m okres fali T z<br />
C D , L<br />
promie bbna wcigarki liny<br />
prowadzcej<br />
2.2<br />
wspóczynnik oporu<br />
hydrodynamicznego liny<br />
C D , l<br />
0.0 - 0.5 s<br />
m<br />
9 s<br />
1.4<br />
0.15m rednica nominalna lin prowadzcych 24mm<br />
a )<br />
b)<br />
przemieszczenia[m]<br />
vL[m/s]<br />
czas[s]<br />
czas[s]<br />
Rys. 6. a) Przebiegi wymuszenia ruchu jednostki pywajcej,<br />
b) prdko adunku wzdu osi y
Modelowanie i analiza ukadu do obsugi moduów instalowanych na dnie morza 95<br />
Dla adunku opuszczonego na gboko 300m obliczono przemieszczenia wywoane<br />
falowaniem i parciem prdu, a wyniki przedstawiono na Rys. 7. W przypadku braku<br />
systemu lin prowadzcych, odchylenie adunku w kierunku prdkoci prdu dochodzi do<br />
4m. Zastosowanie lin prowadzcych, nawet przy stosunkowo niskim nacigu, prowadzi do<br />
ograniczenia tego przemieszczenia. W analizowanym przykadzie odchylenie adunku<br />
wynosi ok. 0.5m. Przyjty tryb pracy wcigarek lin prowadzcych zapewnia wzgldnie<br />
stay nacig lin, dlatego w przypadku pojawienia si znacznych si bocznych (wywoanych<br />
na przykad silnym prdem), lina zostanie odwinita z bbna i adunek podlega<br />
zwikszonym przemieszczeniom poprzecznym. Po ustaniu si poprzecznych, stay moment<br />
napdowy powoduje nawijanie si lin, i adunek jest sprowadzany do pozycji ustalonej<br />
przez napicie lin.<br />
a )<br />
b)<br />
xL[m]<br />
Fliny[kN]<br />
czas[s]<br />
czas[s]<br />
Rys. 7. a) Wpyw lin prowadzcych na wspórzdn x adunku,<br />
b) siy nacigu liny prowadzcej przy bbnie oraz reakcja w miejscu mocowania liny w dnie<br />
Warto bezwzgldn reakcji pionowej obliczonej dla punktu zamocowania liny<br />
prowadzcej w dnie przedstawia rysunek 7 b). Bezwadno ukadu powoduje, e<br />
sterowanie prac wcigarki (zastosowano stay moment napdowy bez informacji o stanie<br />
ukadu) powinno uwzgldnia równie prdko zmiany pooenia statku. Niska warto<br />
si nacigu lin prowadzcych oraz znaczna masa adunku, powoduje due wartoci<br />
przemieszcze ktowych (i prdkoci) bbnów wcigarek, dlatego efekty dynamiczne<br />
ujawniaj si w postaci waha siy napicia lin.<br />
4. PODSUMOWANIE<br />
W pracy przedstawiono ukad systemu do obsugi moduów stosowanych w instalacjach<br />
offshore przy wydobyciu ropy i gazu. Uproszczony model matematyczny umoliwia<br />
wstpn analiz si powstajcych w trakcie pracy urzdzenia w warunkach falowania<br />
morskiego. Wyniki symulacji mog by przydatne w fazie projektowania urzdzenia,<br />
definiowania wymaga i specyfikacji poszczególnych komponentów ukadu, jak równie
96 Marek Szczotka<br />
do okrelenia warunków granicznych, przy których moliwa jest jeszcze bezpieczna praca<br />
urzdzenia. Ze wzgldu na znaczne koszty poszczególnych moduów instalowanych na<br />
dnie morza, operacje zwizane z ich przemieszczaniem musz by wykonane w sposób<br />
kontrolowany. Opracowany model i program wzgldnie szybko pozwalaj na ocen<br />
ustawie podstawowych parametrów eksploatacyjnych, geometrycznych i tych zwizanych<br />
z bezwadnoci, dla danego rodzaju wymuszenia (warunków pogodowych).<br />
Innym moliwym zastosowaniem przedstawionego modelu jest sterowanie prac<br />
wcigarek AHC oraz pomocniczych, do uzyskiwania danego nacigu lin prowadzcych.<br />
Moliwe jest poczenie modelu dynamiki z algorytmami sterowania, oraz czujnikami<br />
ruchu jednostki. Ukad taki zostay zbudowany oraz zainstalowany w prezentowanym<br />
w pracy urzdzeniu. Jako kompensacji waha adunku, przy masach rzdu 20-30 ton<br />
wynosi 95% przy charakterystycznej wysokoci fal 5.0m. Wynik ten cakowicie wystarcza<br />
na bezpieczn instalacj infrastruktury w warunkach bardzo intensywnego falowania.<br />
Autor dzikuje firmie AXTech AS (Molde, Norwegia), producentowi systemów MHS, za zgod na<br />
opublikowanie zdj i szereg danych do oblicze.<br />
Bibliografia<br />
1. Hann M.: Komputerowa analiza niezawodnoci i bezpieczestwa maszyn i konstrukcji okrtowych<br />
poddanych koysaniom. Okrtownictwo i egluga, 2001.<br />
2. Hann M.: Statics and dynamics of multi-cable systems for semi-submersibles. Marine Structures 1995,<br />
Vol. 8, 1, s. 555-583.<br />
3. Szelangiewicz T.: Wpyw kotwicznego systemu utrzymania pozycji na koysania statku w obecnoci<br />
wiatru prdu i falowania. Prace Naukowe Politechniki Szczeciskiej, Nr 523, 1995.<br />
4. Szczotka M.: Simulation of an AHC system during offshore installation. Logistyka 2010, 2, s. 2311-2320.<br />
5. Craig J.J.: Wprowadzenie do robotyki. WNT, Warszawa 1995.<br />
6. Wittbrodt E., Adamiec-Wójcik I., Wojciech S.: Dynamics of flexible multibody systems. The rigid finite<br />
element method. Springer 2006.<br />
7. Szczotka M.: Pipe laying simulation with an active reel drive. Ocean Eng. 2010, Vol. 37, 2, s. 539-548.<br />
8. Morison J.R., O'Brien M.P., Johnson J.W., Schaaf S.A.: The force exerted by surface waves on piles.<br />
Petroleum Transactions, 1950, Vol. 189, s. 149-154.<br />
9. Chakrabarti S.K.: Hydrodynamics of offshore structures. WIT Press 1987.<br />
MODELLING AND SIMULATION OF AN SUBSEA MODULE HANDLING SYSTEM<br />
Summary: Dedicated, multi-purpose module handling system (MHS) is presented in the paper. Typically<br />
such equipment is assembled on a special offshore vessel, performing various construction works related to<br />
subsea field developments. Special modules (for example pumps, compressors, special tanks) are lowered<br />
towards the seabed and need to be positioned precisely on defined foundation. This is possible thanks to the<br />
application of the guide wires and an AHC (Active Heave Compensation) system. The module handling<br />
system is useful tool in the case of strong sea currents. When the module has to be lowered directly into a<br />
precise location on the seabed, general, offshore crane cannot be used easily. In this case, the MHS is far<br />
better solution. A simplified mathematical model of the system is shortly presented in the article, together<br />
with some example simulation results. The influence of the guide wires on the behavior of a load is presented<br />
through the results.<br />
Keywords: MHPS, simulation of module installation, offshore equipment<br />
Recenzent: Lech Kobyliski