

22. parametry geometryczne figur płaskich
22. parametry geometryczne figur płaskich
22. parametry geometryczne figur płaskich

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 1<br />
<strong>22.</strong> <br />
PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH<br />
<strong>22.</strong>1. DEFINICJE<br />
Rozdział <strong>22.</strong> dotyczy <strong>figur</strong> płaskich o równomiernym rozkładzie masy<br />
(ρ = const). Rozważane <strong>figur</strong>y reprezentują zazwyczaj przekroje prętów. Dlatego zamiast określenia „<strong>figur</strong>a<br />
płaska” stosuje się również określenie „przekrój”.<br />
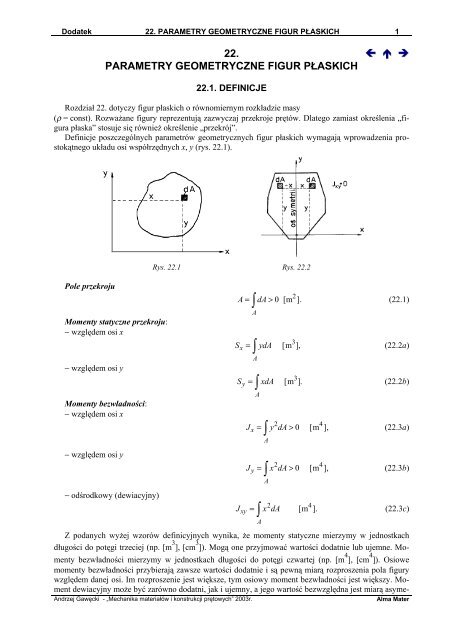
Definicje poszczególnych parametrów geometrycznych <strong>figur</strong> płaskich wymagają wprowadzenia prostokątnego<br />
układu osi współrzędnych x, y (rys. <strong>22.</strong>1).<br />
Pole przekroju<br />
Momenty statyczne przekroju:<br />
− względem osi x<br />
− względem osi y<br />
Momenty bezwładności:<br />
− względem osi x<br />
− względem osi y<br />
− odśrodkowy (dewiacyjny)<br />
Rys. <strong>22.</strong>1 Rys. <strong>22.</strong>2<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
A= ∫<br />
dA><br />
0 [m 2 ]. (<strong>22.</strong>1)<br />
A<br />
Sx<br />
=<br />
∫<br />
ydA [ m 3 ],<br />
A<br />
Sy<br />
=<br />
3<br />
∫<br />
xdA [ m ].<br />
A<br />
Jx<br />
=<br />
∫<br />
y 2 dA><br />
0 [ m 4 ],<br />
A<br />
Jy<br />
=<br />
∫<br />
x 2 dA><br />
0 [ m 4 ],<br />
A<br />
Jxy<br />
=<br />
∫<br />
x 2 dA [ m 4 ].<br />
A<br />
(<strong>22.</strong>2a)<br />
(<strong>22.</strong>2b)<br />
(<strong>22.</strong>3a)<br />
(<strong>22.</strong>3b)<br />
(<strong>22.</strong>3c)<br />
Z podanych wyżej wzorów definicyjnych wynika, że momenty statyczne mierzymy w jednostkach<br />
długości do potęgi trzeciej (np. [m 3 ], [cm 3 ]). Mogą one przyjmować wartości dodatnie lub ujemne. Momenty<br />
bezwładności mierzymy w jednostkach długości do potęgi czwartej (np. [m 4 ], [cm 4 ]). Osiowe<br />
momenty bezwładności przybierają zawsze wartości dodatnie i są pewną miarą rozproszenia pola <strong>figur</strong>y<br />
względem danej osi. Im rozproszenie jest większe, tym osiowy moment bezwładności jest większy. Moment<br />
dewiacyjny może być zarówno dodatni, jak i ujemny, a jego wartość bezwzględna jest miarą asyme-<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 2<br />
trii <strong>figur</strong>y względem przyjętego układu współrzędnych. Łatwo zauważyć, że jeśli choć jedna z osi układu<br />
jest osią symetrii <strong>figur</strong>y, to moment dewiacyjny względem tego układu jest równy zeru (por. rys. <strong>22.</strong>2).<br />
Wynika to stąd, że iloczyny xydA w odpowiadających sobie punktach wzajemnie się znoszą.<br />
<strong>22.</strong>2. OSIE ŚRODKOWE, ŚRODEK CIĘŻKOŚCI<br />
Oś środkowa to taka oś, względem której moment statyczny jest równy zeru. Środek ciężkości (SC) to<br />
punkt przecięcia osi środkowych.<br />
Rys. <strong>22.</strong>3 Rys. <strong>22.</strong>4<br />
Jeśli osie x0 i y0<br />
są osiami środkowymi, to<br />
(a) Sx<br />
= y dA y yc<br />
dA<br />
0 ∫ 0 =<br />
∫<br />
( − ) = 0,<br />
A A<br />
(b) Sy<br />
= x dA x xc<br />
dA<br />
0 0 = ( − ) = 0.<br />
∫ ∫<br />
A A<br />
Po rozpisaniu zależności (a) i (b) otrzymujemy:<br />
Sx = ydA− yc dA= Sx − yc⋅ A=<br />
0,<br />
0<br />
A<br />
A<br />
Sy = xdA− xc dA= Sy −xc⋅ A=<br />
0,<br />
0<br />
∫<br />
∫<br />
A<br />
∫<br />
∫<br />
A<br />
skąd wyznaczamy współrzędne środka ciężkości xc<br />
i yc:<br />
S y<br />
S<br />
xc<br />
= , y x<br />
c = . (<strong>22.</strong>4)<br />
A<br />
A<br />
Jeśli znamy położenie środka ciężkości i pole <strong>figur</strong>y, to momenty statyczne tej <strong>figur</strong>y względem osi x, y<br />
leżących w odległościach xc<br />
i yc<br />
obliczamy wprost z równań (<strong>22.</strong>4):<br />
Sx = A⋅ yc, Sy = A⋅xc.<br />
Jeśli <strong>figur</strong>a składa się z n części o znanych polach A i oraz współrzędnych środków ciężkości<br />
xi<br />
i yi<br />
( i = 12 , ,..., n)<br />
, to (por. rys. <strong>22.</strong>4):<br />
n n<br />
n n<br />
Sx = ∑Sx = Ai yi<br />
Sy Sy Ai x<br />
i ∑ ⋅ ; = ∑ = i ∑ ⋅ i .<br />
(<strong>22.</strong>5)<br />
i= 1 i=<br />
1<br />
i=<br />
1 i=<br />
1<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 3<br />
n<br />
n<br />
∑ Ax i i ∑ Ay i i<br />
Sy<br />
S<br />
x i<br />
c = = = 1 ; y x i<br />
A n c = = = 1 .<br />
A n<br />
∑ Ai<br />
∑ Ai<br />
(<strong>22.</strong>6)<br />
i=<br />
1<br />
i=<br />
1<br />
<strong>22.</strong>3. MOMENTY BEZWŁADNOŚCI PRZY PRZESUNIĘCIU<br />
I OBROCIE UKŁADU OSI WSPÓŁRZĘDNYCH.<br />
KIERUNKI I WARTOŚCI GŁÓWNE<br />
Założymy, że znamy wartości momentów bezwładności J x' , J y' , J x'y' odniesione do układu osi x' i y'.<br />
Dokonajmy przesunięcia równoległego układu osi z położenia x', y' do nowego położenia x, y. Pytamy<br />
teraz, jakie wartości przyjmą momenty bezwładności J x , J y , J xy odniesione do układu osi x, y, jeśli współrzędne<br />
przesunięcia względnego obu układów wynoszą x p i y p (rys. <strong>22.</strong>5). Przesunięcie układów opisują<br />
równania:<br />
(a)<br />
⎧⎪<br />
x = x' + xp<br />
,<br />
⎨<br />
⎩⎪ y = y' + yp.<br />
Po podstawieniu tych zależności do wzorów definicyjnych (<strong>22.</strong>3) otrzymujemy:<br />
(b)<br />
⎧<br />
⎪ 2 2 2 2<br />
Jx = y dA = y + yp dA = y dA + yp y dA + yp<br />
dA<br />
⎪ ∫ ∫(' )<br />
∫<br />
' 2<br />
∫<br />
'<br />
∫<br />
,<br />
⎪ A A<br />
A<br />
A A<br />
⎪ 2 2 2 2<br />
⎨Jy =<br />
∫<br />
x dA =<br />
∫(' x + xp) dA =<br />
∫<br />
x' dA + 2xp∫<br />
x' dA + xp∫dA,<br />
⎪ A A<br />
A<br />
A A<br />
⎪<br />
⎪Jxy = xydA= (' x+ xp)(' ⋅ y+ yp) dA= xydA '' + xp ydA ' + yp<br />
xdA ' + xpyp<br />
dA.<br />
⎪ ∫ ∫ ∫ ∫ ∫ ∫<br />
⎩ A A<br />
A<br />
A A<br />
A<br />
Rys. <strong>22.</strong>5 Rys. <strong>22.</strong>6<br />
Prawe strony równań (b) można przedstawić za pomocą parametrów geometrycznych <strong>figur</strong>y związanych<br />
z układem x', y' wykorzystując wzory (<strong>22.</strong>1), (<strong>22.</strong>2)<br />
i (<strong>22.</strong>3):<br />
⎧<br />
2<br />
Jx = Jx'<br />
+ 2yp⋅ Sx'<br />
+ yp⋅A,<br />
⎪<br />
2<br />
(c)<br />
⎨Jy = Jy'<br />
+ 2xp⋅ Sy'<br />
+ xp⋅A,<br />
⎪<br />
Jxy = Jx y + xpSx + yp ⋅ Sy + xp ⋅yp<br />
⋅A<br />
⎩<br />
⎪ ' ' ' ' .<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 4<br />
Jeśli układ osi x', y' jest układem osi środkowych ( x'= x 0 , y'= y 0 , xp<br />
= xc, yp<br />
= yc), to wzory (c)<br />
znacznie się uproszczą. Dla osi środkowych momenty statyczne Sx' = Sx = 0 i Sy S<br />
o ' = y = 0,<br />
a równania<br />
(c) przyjmą<br />
o<br />
postać:<br />
2<br />
Jx = Jx + y A ⎫<br />
0 c ,<br />
2 ⎪<br />
Jy = Jy0<br />
+ xc<br />
A,<br />
⎬<br />
⎪<br />
Jxy = Jx0y0<br />
+ xc yc<br />
A.<br />
⎭⎪<br />
(<strong>22.</strong>7)<br />
Są to tzw. wzory Steinera, bardzo użyteczne w obliczeniach.<br />
Rozważymy teraz, jak zmieniają się momenty bezwładności przy obrocie układu osi współrzędnych.<br />
Przyjmiemy, że znane są wartości J x , J y , J xy w układzie osi x, y. Poszukujemy J x' , J y' , i J x'y' w układzie osi<br />
x', y' obróconym o kąt ϕ względem układu x y (rys. <strong>22.</strong>6). Współrzędne punktów obu układów są powiązane<br />
wzorami transformacyjnymi:<br />
⎧x' = xcosϕ<br />
+ ysin ϕ,<br />
(d)<br />
⎨<br />
⎩y' =− xsinϕ<br />
+ ycos ϕ.<br />
W celu wyprowadzenia poszukiwanych zależności skorzystamy ze wzoru na zamianę zmiennych w całce<br />
podwójnej:<br />
∫<br />
f ( x', y') dA' = f x'( x, y), y'( x, y) J⋅dA,<br />
(e) [ ]<br />
gdzie jakobian<br />
A<br />
J =<br />
∂x'<br />
∂x<br />
∂y'<br />
∂x<br />
∂x'<br />
∂y<br />
∂y'<br />
∂y<br />
∫<br />
A<br />
cosϕ<br />
sinϕ<br />
= = 1 .<br />
− sinϕ<br />
cosϕ<br />
Po podstawieniu wzorów transformacyjnych (d) do wzorów definicyjnych otrzymujemy:<br />
(f)<br />
∫<br />
∫<br />
⎧ 2 2<br />
Jx'<br />
= y' dA' = ( − x sinϕ<br />
+ y cos ϕ)<br />
dA =<br />
⎪<br />
⎪ A'<br />
A<br />
⎪ 2 2 2 2<br />
⎪ = sin ϕ∫x dA− 2 sinϕcosϕ∫<br />
xydA+<br />
cos ϕ∫<br />
y dA,<br />
⎪<br />
A<br />
A<br />
A<br />
⎪<br />
2 2<br />
⎪ J y'<br />
=<br />
∫<br />
x' dA' =<br />
∫<br />
( x cosϕ<br />
+ y sin ϕ)<br />
dA =<br />
⎪ A'<br />
A<br />
⎨<br />
2 2 2 2<br />
⎪ = cos ϕ∫x dA+ 2sinϕcosϕ∫<br />
xydA+<br />
sin ϕ∫<br />
y dA,<br />
⎪<br />
A<br />
A<br />
A<br />
⎪<br />
⎪<br />
2<br />
Jxy''<br />
=<br />
∫<br />
x' y' dA' =<br />
∫<br />
( xcosϕ + ysin ϕ)( − xsinϕ + ycos ϕ)<br />
dA=<br />
⎪<br />
⎪ A'<br />
A<br />
⎪<br />
2 2 2 2<br />
⎪<br />
=− sinϕcosϕ∫x dA + sinϕcos ϕ∫<br />
y dA + (cos ϕ −sin ϕ∫xydA.<br />
⎩⎪<br />
A<br />
A<br />
A<br />
Prawe strony równań (f) można wyrazić za pomocą momentów bezwładności związanych z układem osi<br />
x, y. Wygodnie też będzie wprowadzić funkcję trygonometryczne kąta 2ϕ:<br />
2 1<br />
2<br />
2 1<br />
2<br />
sin ϕ = ( 1− cos 2ϕ); cos ϕ = ( 1+ cos 2ϕ); 2sinϕcosϕ = sin 2ϕ.<br />
Ostatecznie poszukiwane wzory transformacyjne dla momentów bezwładności przy obrocie układu przyjmują<br />
postać:<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 5<br />
Jx + Jy Jx − Jy<br />
⎫<br />
Jx'<br />
= + ⋅cos2ϕ<br />
− Jxy<br />
sin 2ϕ,<br />
⎪<br />
2 2<br />
⎪<br />
Jx + Jy Jx − Jy<br />
⎪<br />
J y'<br />
= − ⋅ cos2ϕ<br />
+ Jxy<br />
sin 2ϕ,<br />
⎬<br />
2 2<br />
⎪<br />
Jx<br />
− Jy<br />
⎪<br />
Jxy<br />
' ' = sin 2ϕ<br />
+ Jxy<br />
cos 2ϕ.<br />
⎪<br />
2<br />
⎭<br />
(<strong>22.</strong>8)<br />
Rzut oka na wzory (<strong>22.</strong>8) pozwala stwierdzić, że po obrocie układu suma osiowych momentów bezwładności<br />
nie ulega zmianie. Suma ta określa tzw. biegunowy moment bezwładności J b . Moment ten jest<br />
więc niezmiennikiem:<br />
Jb =<br />
∫ ( 2 2<br />
x + y ) dA= Jx + Jy = Jx' + Jy'<br />
= const. (<strong>22.</strong>9)<br />
A<br />
Szczegółowa analiza wzoru (<strong>22.</strong>8) prowadzi do wniosku, że niezmiennikiem jest również wyrażenie:<br />
2 2<br />
I3<br />
= JxJy − Jxy = Jx' ⋅Jy' − Jx' y' = const .<br />
(<strong>22.</strong>10)<br />
W punkcie <strong>22.</strong>1 zwróciliśmy uwagę na to, że jeśli jedna z osi układu jest osią symetrii <strong>figur</strong>y, to moment<br />
dewiacyjny w tym układzie jest równy zeru. Powstaje pytanie, czy dla dowolnego niesymetrycznego<br />
przekroju jest również taki układ osi, w którym znika moment dewiacyjny. Wymaganie, by J x'y' = 0,<br />
stosownie do wzoru (<strong>22.</strong>8) 3 , nakłada na kąt ϕ = ϕ 0 warunek:<br />
Jx<br />
− Jy<br />
(g)<br />
⋅ sin2ϕ0 + Jxy<br />
cos 2ϕ<br />
0 = 0,<br />
2<br />
skąd<br />
2Jxy<br />
tg2ϕ 0 =− . (<strong>22.</strong>11)<br />
Jx<br />
− Jy<br />
Zwróćmy uwagę, że do identycznego warunku z warunkiem (g) dochodzimy, poszukując ekstremalnych<br />
wartości osiowych momentów bezwładności jako funkcji kąta ϕ:<br />
dJy' dJ J J<br />
x x − y<br />
=− ' = 2 ⋅ ⋅ sin2ϕ<br />
+ 2⋅ Jxy<br />
cos 2ϕ<br />
= 0 .<br />
dϕ<br />
dϕ<br />
2<br />
Z powyższych rozważań wnioskujemy, że jest pewien wyróżniony układ osi współrzędnych, określony<br />
kątem ϕ 0 , dla którego osiowe momenty bezwładności osiągają wartości ekstremalne, a moment dewiacyjny<br />
znika. Taki układ osi nazywamy układem głównych osi bezwładności (I, II), a momenty osiowe<br />
w tym układzie − głównymi momentami bezwładności. Wartości głównych momentów bezwładności<br />
obliczamy po wstawieniu kąta ϕ 0 z równania (<strong>22.</strong>11) do równań (<strong>22.</strong>8) 1 i (<strong>22.</strong>8) 2 :<br />
2 ⎫<br />
Jx + Jy ⎛ Jx − Jy⎞<br />
2<br />
Jmax<br />
= J = + ⎜ ⎟ + Jxy<br />
, ⎪<br />
I<br />
2 ⎝ 2 ⎠<br />
⎪<br />
⎬ ... (<strong>22.</strong>12)<br />
2<br />
Jx + Jy ⎛ Jx − Jy⎞<br />
⎪<br />
2<br />
Jmin<br />
= JII<br />
= − ⎜ ⎟ + Jxy<br />
. ⎪<br />
2 ⎝ 2 ⎠<br />
⎭⎪<br />
Położenie osi I związanej z momentem J I określa się następująco:<br />
− jeśli J x > J y , to ϕ 0 jest kątem pomiędzy osią x a osią I,<br />
− jeśli J x < J y , to ϕ 0 jest kątem pomiędzy osią y a osią I.<br />
Najczęściej obliczenia wykonujemy w układzie osi środkowych x 0 , y 0 . Wówczas osie I i II nazywamy<br />
głównymi środkowymi osiami bezwładności, a momenty J I i J II − głównymi środkowymi momentami<br />
bezwładności.<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 6<br />
Uważny czytelnik stwierdzi uderzającą analogię między wzorami (<strong>22.</strong>8)÷(<strong>22.</strong>11) a zależnościami występującymi<br />
w analizie płaskiego stanu naprężenia (p. 1.8). Jeśli we wzorach (<strong>22.</strong>8) przyjmiemy, że:<br />
Jx = σx , Jy = σy , Jxy = τxy , Jx' = σx' , Jy' = σy' , Jx' y' = τx' y' ,<br />
to otrzymamy zależności identyczne z wzorami transformacyjnymi (1.33) dla płaskiego stanu naprężenia.<br />
Analogia ta wynika stąd, że momenty bezwładności tworzą płaski tensor drugiego rzędu. Wyjaśnienie<br />
tensorowego charakteru momentów bezwładności zamieszczono w p. <strong>22.</strong>4.<br />
Wobec powyższego koło Mohra, omówione szczegółowo w rozdziale 1. (p. 1.8), jest również ilustracją<br />
graficzną wzorów transformacyjnych (<strong>22.</strong>8). Dla jasności trzeba też dodać, że konstrukcję koła wykonuje<br />
się, przyjmując że J yx = −J xy ! Ciekawostką jest, że Mohr w 1887 roku obmyślił konstrukcję koła<br />
właśnie dla momentów bezwładności.<br />
<strong>22.</strong>4. PARAMETRY GEOMETRYCZNE PRZEKROJU<br />
JAKO WIELKOŚCI TENSOROWE<br />
Momenty statyczne nazywają się często momentami pierwszego rzędu (stopnia), a momenty bezwładności<br />
− momentami rzędu rzędu (stopnia). Określenia te wynikają z potęg, w których występują współrzędne<br />
x, y we wzorach (<strong>22.</strong>2) i (<strong>22.</strong>3). Pole przekroju można by nazwać momentem rzędu zero. Nadmieniamy<br />
o tym nieprzypadkowo, gdyż pole przekroju, momenty statyczne i momenty bezwładności mają<br />
własności tensorów odpowiednio rzędu zerowego, pierwszego i drugiego. Pole przekroju jest skalarem,<br />
momenty statyczne S x i S y są współrzędnymi wektora, a momenty bezwładności J x , J y , J xy − współrzędnymi<br />
tensora dwuwymiarowego.<br />
Dla potwierdzenia powyższych uwag wyprowadzimy prawa transformacji momentów statycznych i<br />
momentów bezwładności dla obrotu układu współrzędnych. Przyjmiemy najpierw następujące oznaczenia:<br />
⎧x1 = x, x2 = y; x1'<br />
= x', x2'<br />
= y';<br />
(a)<br />
⎨<br />
⎩<br />
M1 = Sy, M2 = Sx; B11 = Jy, B22 = Jx,<br />
B12 = B21<br />
= Jxy<br />
Wówczas wzory definicyjne (<strong>22.</strong>2) i (<strong>22.</strong>3) można zapisać następująco:<br />
(b) Mα<br />
=<br />
∫<br />
xαdA,<br />
A<br />
(c) Bαβ = xα xβdA,( αβ , = 12 , ),<br />
∫<br />
A<br />
a wzory transformacyjne współrzędnych punktów w konwencji sumacyjnej określają znane zależności<br />
(por. rozdz. 1.):<br />
(d) xγ'<br />
= xα ⋅ aαγ'<br />
lub<br />
(e) xδ' = xβ ⋅ aβδ' ( α, β = 1, 2; γ ', δ ' = 1', 2 ').<br />
W układzie osi obróconych, stosownie do definicji (b) i (c) oraz wzorów (d) i (e), możemy napisać:<br />
Mγ' = ∫<br />
xγ' dA' = ∫<br />
xα ⋅ aαγ' dA = aαγ'<br />
∫ xαdA,<br />
A'<br />
A<br />
A<br />
Bγ ' δ ' =<br />
∫<br />
xγ ' ⋅ xδ ' dA' =<br />
∫<br />
xα aαγ ' ⋅ xβaβδ ' dA= aαγ ' aβδ ' ∫<br />
xα ⋅xβdA,<br />
A'<br />
A<br />
A<br />
skąd<br />
⎧⎪<br />
Mγ'<br />
= Mα ⋅aαγ'<br />
,<br />
(f)<br />
⎨<br />
⎩⎪ Bγ ' δ ' = Bαβ ⋅aαγ ' ⋅aβδ<br />
'.<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 7<br />
Wzory (f) definiują transformację wektora i tensora przy obrocie układu współrzędnych w przestrzeni<br />
dwuwymiarowej, co wykazuje, że rzeczywiście momenty statyczne są współrzędnymi wektora, a momenty<br />
bezwładności − współrzędnymi tensora. Podobnie jest i w przestrzeni trójwymiarowej, gdzie momenty<br />
bezwładności tworzą dziewięć współrzędnych tensora symetrycznego, zdefiniowanych następująco<br />
(Karaśkiewicz [24]):<br />
⎡ ⎤<br />
(g) Bij = B ji = ⎢ xk xk<br />
⋅dV ⎥<br />
ij xi x j dV i j<br />
⎢∫<br />
⎥ ⋅ δ − ∫<br />
⋅ ; ( , = 123 , , ).<br />
⎣V<br />
⎦ V<br />
Tensor bezwładności <strong>figur</strong>y płaskiej jest reprezentowany przez macierz:<br />
(h) J = ⎡ J<br />
⎣ ⎢ y Jxy⎤<br />
J J<br />
⎥ .<br />
yx x ⎦<br />
Z postaci tej wnioskujemy, że niezmienniki tensora bezwładności są opisane wzorami (por. również wzory<br />
(<strong>22.</strong>9) i (<strong>22.</strong>10)):<br />
(i) I1 = I2<br />
= Jb = Jx + Jy = Jx' + Jy' = JI + JII = const > 0,<br />
(j)<br />
Jy<br />
Jxy<br />
2 2<br />
I3<br />
= = Jy⋅Jx − Jxy = Jy' Jx' − Jx' y' = JI⋅ JII = const > 0.<br />
Jyx<br />
Jx<br />
<strong>22.</strong>5. WSKAZÓWKI PRAKTYCZNE<br />
Analogia między momentami bezwładności a płaskim stanem naprężenia nie jest jednak pełna. Istotna<br />
różnica polega na tym, że osiowe momenty bezwładności są zawsze dodatnie, podczas gdy naprężenia<br />
normalne mogą być również ujemne. Okoliczność ta nakłada pewne warunki na wartość momentów bezwładności.<br />
Ponieważ I3 = JI⋅ JII > 0 , więc zgodnie ze wzorem (j) w p. <strong>22.</strong>4 musi zachodzić nierówność:<br />
2<br />
Jx ⋅Jy − Jxy<br />
> 0,<br />
skąd<br />
(a) Jxy < Jx ⋅ Jy<br />
.<br />
2 2 2<br />
Z nierówności ( x− y)<br />
= x + y − 2xy<br />
> 0 wynika dalej, że<br />
Jx + Jy − 2Jxy<br />
> 0,<br />
skąd<br />
Jx<br />
+ Jy<br />
(b)<br />
J xy < .<br />
2<br />
Ze wzoru (a) wynika, że wartość bezwzględna momentu dewiacyjnego musi być mniejsza od średniej<br />
<strong>geometryczne</strong>j osiowych momentów bezwładności. Ze wzoru (b) wynika natomiast, że moment dewiacyjny<br />
musi być mniejszy od średniej arytmetycznej osiowych momentów bezwładności. Ponieważ średnia<br />
geometryczna nigdy nie jest większa od średniej arytmetycznej, zatem miarodajna jest nierówność<br />
(a), którą można zapisać następująco:<br />
− Jx ⋅ Jy < Jxy < Jx ⋅Jy . (<strong>22.</strong>13)<br />
Nierówność (<strong>22.</strong>13) dowodzi, że dowolna trójka liczb nie tworzy tensora bezwładności. Nierówność ta −<br />
słuszna również dla dowolnego, nieśrodkowego układu współrzędnych − jest właściwie jedynym sposobem<br />
kontroli ilościowej obliczonych wartości J x , J y , J xy .<br />
Gdy korzysta się z gotowych wzorów lub tablic należy ustalić właściwy znak momentu dewiacyjnego.<br />
Najczęściej zdarza się to w przekrojach trójkątnych lub kątownikach. O znaku J xy decyduje położenie<br />
ramion kątownika (lub trójkąta). Rozróżniamy tu 4 przypadki przedstawione na rys. <strong>22.</strong>7.<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 8<br />
Rys. <strong>22.</strong>7<br />
W tablicy IV podano <strong>parametry</strong> <strong>geometryczne</strong> najczęściej spotykanych <strong>figur</strong> płaskich.<br />
Tablica IV<br />
<strong>22.</strong>6. PRZYKŁAD LICZBOWY<br />
Dany jest przekrój złożony, przedstawiony na rys. <strong>22.</strong>8.<br />
Obliczyć:<br />
a) położenie środka ciężkości,<br />
b) momenty bezwładności względem osi środkowych x0, y0,<br />
c) kierunki środkowych osi głównych,<br />
d) główne środkowe momenty bezwładności,<br />
e) momenty bezwładności względem osi środkowych x0'<br />
, y0'<br />
, obróconych względem osi x0, y0<br />
o kąt<br />
ϕ = −40°.<br />
Obliczenia zilustrować kołem Mohra.<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 9<br />
Rys.<strong>22.</strong>8<br />
Rozwiązanie<br />
Przekrój składa się z czterech elementów. Dla kształtowników walcowanych (elementy 1, 3 i 4) odczytano<br />
z tablic:<br />
Element 1. L120×80×10<br />
2<br />
A= 19, 2 cm , ey<br />
= 1, 96 cm, ex<br />
= 3, 93 cm,<br />
4 4 4<br />
tgϕ0<br />
= 0, 436, Jmin<br />
= 57, 7 cm , Jx<br />
= 279 cm , Jy<br />
= 99, 6 cm .<br />
Element 3. L100×100×8<br />
2<br />
A= 15, 5 cm , ey<br />
= ex<br />
= 2, 74 cm,<br />
4 4 4<br />
Jmin<br />
= 59, 9 cm , Jmax<br />
= 230 cm , Jx<br />
= Jy<br />
= 145 cm .<br />
Element 4.[ 200<br />
A= 32, 2 cm 2 , e= 2, 01cm, Jx<br />
= 1910 cm 4 , Jy<br />
= 148 cm<br />
4 .<br />
Zasadnicze obliczenia odniesiono do pomocniczego układu współrzędnych x, y<br />
(por. rys. <strong>22.</strong>8).<br />
a) Obliczenie współrzędnych środka ciężkości całego przekroju<br />
Obliczenie wykonamy według wzorów (<strong>22.</strong>6):<br />
Ax i i<br />
Ay i i<br />
(a)<br />
xc<br />
= , yc<br />
= .<br />
∑ Ai<br />
∑ Ai<br />
Współrzędne x 1 , y 1 obliczamy ze wzorów na obrót układu:<br />
(b)<br />
∑<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
∑<br />
x1 = x' 1cos ϕ + y' 1sin ϕ,<br />
y1 =− x'sin 1 ϕ + y'cos 1 ϕ,<br />
o<br />
gdzie ϕ =− α =− arctg( 20 / 15) = 5313 , jest kątem obrotu układu x', y' względem układu x, y (kierunek<br />
obrotu układu x', y' przy przejściu do układu x, y jest zgodny<br />
z ruchem wskazówek zegara i stąd znak minus). Obliczenie pozostałych wartości<br />
x i , y i nie wymaga komentarzy.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 10<br />
Element 1<br />
o<br />
o<br />
sinϕ<br />
= sin( − 53, 13 ) = − 0, 80; cosϕ<br />
= cos( − 53, 13 ) = 0, 60,<br />
x' 1= 8 − 1, 96 = 6, 04 cm, y' 1= 3, 93 + 1, 0 = 4, 93 cm,<br />
x1<br />
= 6, 04 ⋅ 0, 60 + 4, 93⋅( − 0, 80) = −0,<br />
32 cm,<br />
y1<br />
=−6, 04 ⋅( − 0, 80) + 4, 93⋅ 0, 60 = 7,<br />
70 cm.<br />
Element 2<br />
x2<br />
= 750 , cm,<br />
y2<br />
= 10, 00 cm.<br />
Element 3<br />
x3<br />
= 15, 00 + 2, 00 + 10, 00 − 2, 74 = 24, 26 cm,<br />
y3<br />
= 20, 00 − 2, 74 = 17, 26 cm.<br />
Element 3<br />
x4<br />
= 15, 00 + 2, 00 + 10, 00 + 2, 01 = 29, 01cm,<br />
y4<br />
= 10, 00 cm.<br />
Tablica V<br />
Sumowania występujące we wzorach (a) wykonano w tablicy V. Współrzędne środka ciężkości całej<br />
2 3 3<br />
<strong>figur</strong>y ( A= 116, 9 cm , Sy<br />
= 1679, 0 cm , Sx<br />
= 1239,<br />
1cm ):<br />
1679,<br />
0<br />
1239,<br />
1<br />
xc<br />
= = 14, 36 cm , yc<br />
= = 10, 60 cm .<br />
116,<br />
9<br />
116,<br />
9<br />
Zwróćmy uwagę na to, że środek ciężkości całego przekroju musi leżeć w obrębie wieloboku utworzonego<br />
przez połączenie środków ciężkości <strong>figur</strong> składowych.<br />
W naszym zadaniu wymaganie to jest spełnione (por. rys. <strong>22.</strong>8).<br />
b) Obliczenie momentów bezwładności względem osi środkowych x0,<br />
y0<br />
Współrzędne środków ciężkości w układzie osi środkowych dla poszczególnych <strong>figur</strong> składowych<br />
obliczamy ze wzorów:<br />
⎧ xci = xi −xc,<br />
(c)<br />
⎨<br />
⎩ yci = yi − yc.<br />
Momenty bezwładności względem osi środkowych wyznaczamy na podstawie wzorów Steinera:<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
(d)<br />
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 11<br />
∑<br />
( ) ( )<br />
i<br />
i<br />
∑<br />
2 2<br />
Jx = Jx + Ai ⋅ yci = Jx + Ai yi − yc<br />
,<br />
0 0 0<br />
i<br />
i i<br />
2 2<br />
Jy = ( Jy Ai xci) Jy Ai( xi xc)<br />
0 ∑ + ⋅ =<br />
0i<br />
∑ +<br />
0i<br />
∑ − ,<br />
i<br />
i i<br />
Jx y = Jx y + Ai⋅ xciyci = Jx y + Ai xi−xc ⋅ yi−<br />
y<br />
0 0 0 0 0 0<br />
y<br />
i<br />
i<br />
i<br />
∑<br />
∑( ) ( )<br />
i i ∑ i i ∑ ( ).<br />
Wyznaczenie momentów bezwładności poszczególnych <strong>figur</strong> względem własnych osi środkowych,<br />
równoległych do osi x0 i y0, tzn. Jx , Jy , J<br />
0i 0i x0iy<br />
, wymaga pewnych dodatkowych obliczeń.<br />
0i<br />
Element 1<br />
Najpierw trzeba ustalić momenty bezwładności dla osi x01 i y01. Na podstawie tablic otrzymujemy:<br />
Jx<br />
= 279 cm 4 , Jy<br />
= 99, 6 cm<br />
4 .<br />
Moment dewiacyjny J x 01 y 01<br />
Jmin = J II , jak i tgϕ 0 .<br />
Sposób 1. Ponieważ JI<br />
+ JII<br />
= Jx<br />
+ Jy<br />
01 01<br />
można wyznaczyć kilkoma sposobami, ponieważ znamy zarówno<br />
01'<br />
01'<br />
4<br />
więc : JI = Jx<br />
+ Jy<br />
− JII = 279, 0 + 99, 6 − 57, 7 = 320, 9 cm .<br />
01'<br />
01'<br />
Ze wzoru (<strong>22.</strong>10) na obliczenie niezmiennika I 3 otrzymujemy:<br />
skąd<br />
,<br />
2<br />
Jx Jy − J = J J ,<br />
x y I II<br />
01' 01' 01' 01'<br />
Jx ' y ' = Jx ' Jy<br />
' − JI JII = 279 ⋅99, 6 −320, 9 ⋅ 57, 7 = 96,<br />
3 cm > 0,<br />
01 01 01 01<br />
bo w układzie osi x'<br />
01 , y'<br />
01 kątownik jest w położeniu dodatnim.<br />
o<br />
Sposób 2. Ze wzoru na obliczenie tg2ϕ 0 mamy ( 2ϕ 0 = 2arctg( 0, 436) = 47, 11 ):<br />
Jx<br />
J<br />
01' − y01'<br />
279 − 99,<br />
6<br />
4<br />
Jx01 ' y<br />
2<br />
01 ' =<br />
⋅ tg ϕ 0 , J x 01'<br />
y<br />
47 11 96 6<br />
01'<br />
= ⋅ tg , °= , cm .<br />
2<br />
2<br />
Sposób 3. Ze wzoru transformacyjnego na J xy , wyrażonego przez główne momenty bezwładności<br />
JI<br />
i JII, mamy:<br />
J J 320, 9 57,<br />
7<br />
4<br />
Jx01' y<br />
2<br />
47 11 96 4<br />
01' = I − II −<br />
⋅ sin ϕ =<br />
⋅ sin , °= , cm .<br />
2<br />
2<br />
4<br />
Do dalszych obliczeń przyjmujemy, że J x 01' y 96 5<br />
01' = , cm . W celu obliczenia Jx , Jy , J<br />
01 01 x01y01<br />
wykorzystamy wzory transformacyjne na obrót układu z położenia x' 01 , y'<br />
01 do położenia x01, y01<br />
o kąt<br />
α = −53,13°.<br />
279 + 99, 6 279 − 99,<br />
6<br />
4<br />
Jx<br />
= + cos( −25313 ⋅ , ° ) −965 , ⋅sin( −25313<br />
⋅ , ° ) = 256,8 cm ,<br />
01<br />
2 2<br />
4<br />
J y = 279 + 99. 6 − 256, 8 = 121,8 cm ,<br />
01<br />
279 − 99,<br />
6<br />
4<br />
Jx01y<br />
= sin( −25313 ⋅ , ° ) + 965 , ⋅cos( −25313<br />
⋅ , ° ) = −113,1cm<br />
.<br />
01<br />
2<br />
4<br />
Element 2 (blacha 250 mm×20 mm)<br />
Momenty bezwładności względem osi x02'<br />
i y02'<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 12<br />
3<br />
3<br />
25, 0⋅2,<br />
0<br />
4 20 , ⋅250<br />
,<br />
4<br />
Jx<br />
16 7 J<br />
02 ' = = , cm ; y<br />
2604 2<br />
02 ' = = , cm .<br />
12<br />
12<br />
Ponieważ osie x' 02 , y'<br />
02 są głównymi osiami bezwładności, więc J x 02 ' y 0<br />
02 ' = . Momenty bezwładności<br />
względem osi środkowych x02 i y02<br />
obliczymy podobnie jak dla elementu 1:<br />
16, 7 + 2604, 2 16, 7 − 2604,<br />
2<br />
4<br />
Jx<br />
=<br />
+<br />
⋅cos( −25313 ⋅ , ° ) = 16727 , cm ,<br />
02<br />
2<br />
2<br />
4<br />
J y = 16, 7 + 2604, 2 − 1672, 7 = 948, 2 cm ,<br />
02<br />
16, 7 − 2604,<br />
2<br />
4<br />
Jx02 y =<br />
sin( −25313 ⋅ , ° ) = 12420 , cm .<br />
02<br />
2<br />
Element 3<br />
Moment dewiacyjny J x 03 y 03<br />
4<br />
Jx<br />
= J<br />
03 y = 145 cm .<br />
03<br />
obliczymy ze wzorów transformacyjnych wiedząc, że główne osie<br />
bezwładności są pochylone pod kątem −45° w stosunku do osi x , y , a J I = 230 cm<br />
i<br />
4<br />
J II = 60 cm<br />
230, 0 − 66,<br />
0<br />
4<br />
J x 03 y =<br />
sin( −245 ⋅ ° ) = −850<br />
, cm .<br />
03<br />
2<br />
Element 4<br />
Osie x04 i y04<br />
są głównymi osiami bezwładności ceownika. Mamy więc:<br />
4 4<br />
Jx = 1910 cm , Jy = 148 cm , Jx y = 0.<br />
04 04 04 04<br />
03 03<br />
4<br />
Dalsze obliczenia według wzorów (d) zamieszczono w tablicy. Momenty bezwładności całego przekroju<br />
względem osi środkowych x0, y0wynoszą więc:<br />
∑<br />
∑<br />
2 4<br />
Jx<br />
= Jx<br />
+ Ai( yi − yc) = 3984, 5+ 868, 7 = 4853, 2 cm ,<br />
0 0i<br />
i i<br />
2 4<br />
Jy<br />
= Jy<br />
Ai xi x<br />
0 ∑ +<br />
0i<br />
∑ ( − c) = 1363, 0 + 14920, 6 = 16283, 6 cm ,<br />
i i<br />
4<br />
Jx y = Jx y + Ai xi −xc yi − y<br />
0 0 ∑ 0i<br />
0i<br />
∑ ( )( c) = 1043, 9 + 1736, 8 = 2780, 7 cm .<br />
i<br />
i<br />
Sprawdzenie poprawności uzyskanych rezultatów jest w ogólności niemożliwe. Jednak w celu<br />
wychwycenia oczywistych błędów warto zdać się na intuicję oraz sprawdzić nierówności (<strong>22.</strong>13). W<br />
naszym zadaniu przekrój jest rozbudowany wzdłuż osi x 0 , jest więc intuicyjnie oczywiste, że moment<br />
bezwładności J y0 musi być wyraźnie większy od momentu bezwładności J x0 . Można też oszacować<br />
„na oko” znak momentu dewiacyjnego, rozpatrując rozmieszczenie materiału w poszczególnych<br />
ćwiartkach układu x 0 , y 0 . Na rysunku <strong>22.</strong>8 widać, że większa część materiału jest rozmieszczona w<br />
ćwiartkach I i III (ćwiartki dodatnie), a więc moment dewiacyjny J x 0 y powinien być większy od zera.<br />
0<br />
Tak wiec przesłanki intuicyjne potwierdzają poprawność uzyskanych wyników. Również nierówności (a)<br />
i (b) z p. <strong>22.</strong>5 są spełnione:<br />
4 4<br />
J xy = 2780, 7 cm < 4853, 2 ⋅ 16283, 6 = 8890,<br />
56 cm ,<br />
4 4853, 2 + 16283,<br />
6<br />
4<br />
J xy = 2780,<br />
7 cm <<br />
= 10568,<br />
4 cm .<br />
2<br />
Powyższa krytyczna ocena uzyskanych rezultatów jest konieczna, gdyż − jak wykazuje doświadczenie<br />
− największe błędy popełniamy właśnie podczas obliczania wyjściowych wartości momentów bezwładności.<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 13<br />
c) Obliczenie kierunków środkowych osi głównych<br />
Położenie środkowych osi głównych I i II jest określone przez kąt ϕ 0 :<br />
2Jx0y0<br />
227807 ⋅ ,<br />
25,<br />
94° tg2ϕ0 =− =−<br />
= 04865 , , skąd ϕ0<br />
= = 12, 97 ° .Ponieważ Jx<br />
< Jy<br />
,<br />
0 0<br />
Jx<br />
− J 4853 2 −16283 6<br />
2<br />
0 y , ,<br />
0<br />
więc kąt ϕ 0 jest kątem między osią x 0 a osią II.<br />
d) Obliczenie głównych środkowych momentów bezwładności<br />
2<br />
4853, 2 + 16283, 6 ⎛ 4853, 2 − 16283,<br />
6⎞<br />
2<br />
4<br />
JI<br />
=<br />
+ ⎜<br />
⎟ + 2780, 7 = 16924,<br />
2cm ,<br />
2 ⎝ 2 ⎠<br />
2<br />
4853, 2 + 16283, 6 ⎛ 4853, 2 − 16283,<br />
6⎞<br />
2 4<br />
JII<br />
=<br />
− ⎜<br />
⎟ + 2780, 7 = 4212, 6 cm .<br />
2 ⎝ 2 ⎠<br />
Sprawdzimy jeszcze wartość niezmiennika I 3 :<br />
7 8<br />
I3<br />
= JI⋅ JII = 16924, 2 ⋅ 4212, 6 = 7, 129 ⋅ 10 cm = Jx ⋅Jy − J<br />
0 0 x0y0 2 .<br />
e) Obliczenie momentów bezwładności względem osi x' 0, y'<br />
0, obróconych względem osi x0, y0<br />
o<br />
kąt ϕ = −40°.<br />
Do obliczenia wykorzystujemy wzory transformacyjne:<br />
4853, 2 + 16283, 6 4853, 2 −16283,<br />
6<br />
4<br />
Jx0'<br />
=<br />
+<br />
cos( − 80° ) −2780, 7sin( − 80° ) = 12314, 4 cm ,<br />
2<br />
2<br />
4<br />
Jy<br />
4853 2 16283 6 12314 4 8822 4<br />
0'<br />
= , + , − , = , cm ,<br />
4853, 2 −16283,<br />
6<br />
4<br />
Jx0'<br />
y<br />
80 2780 7 80 6111 2<br />
0'<br />
=<br />
⋅sin( − ° ) + , ⋅cos( − ° ) = , cm .<br />
2<br />
Sprawdzenie I 3 :<br />
2 7<br />
I 3 12314 4 8822 4 6111 2 7 129 10<br />
= , ⋅ , − , = , ⋅ cm 8 .<br />
Rezultaty obliczeń zawartych w punktach c), d) i e) sprawdzono za pomocą koła Mohra (rys. <strong>22.</strong>9). Z<br />
rysunku odczytano (w nawiasach podano wartości ścisłe):<br />
o<br />
ϕ 0 = 13<br />
o<br />
( 12, 97 ),<br />
4<br />
JI<br />
= 16940 cm<br />
4<br />
( 16924, 2 cm ),<br />
JII<br />
=<br />
4<br />
4200 cm<br />
4<br />
( 4212, 6 cm ),<br />
4 4<br />
Jx<br />
= 12390 12314 4<br />
0 ' cm ( , cm ),<br />
4 4<br />
J y = 8780 cm 8822 4 cm<br />
0'<br />
( , ),<br />
4 4<br />
Jx<br />
= 6110 cm ( 6111, 2 cm ).<br />
0'<br />
y0'<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater
Dodatek <strong>22.</strong> PARAMETRY GEOMETRYCZNE FIGUR PŁASKICH 14<br />
Rys. <strong>22.</strong>9<br />
Andrzej Gawęcki - „Mechanika materiałów i konstrukcji prętowych” 2003r.<br />
Alma Mater














