

Dynamika - wersja komputerowa 18 - Instytut Konstrukcji Budowlanych
Dynamika - wersja komputerowa 18 - Instytut Konstrukcji Budowlanych
Dynamika - wersja komputerowa 18 - Instytut Konstrukcji Budowlanych

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
POLITECHNIKA POZNAŃSKA<br />
INSTYTUT KONSTRUKCJI<br />
BUDOWLANYCH<br />
ZAKŁAD MECHANIKI BUDOWLI 1<br />
<br />
PROJEKT NR 1-DYNAMIKA RAM- WERSJA KOMPUTEROWA<br />
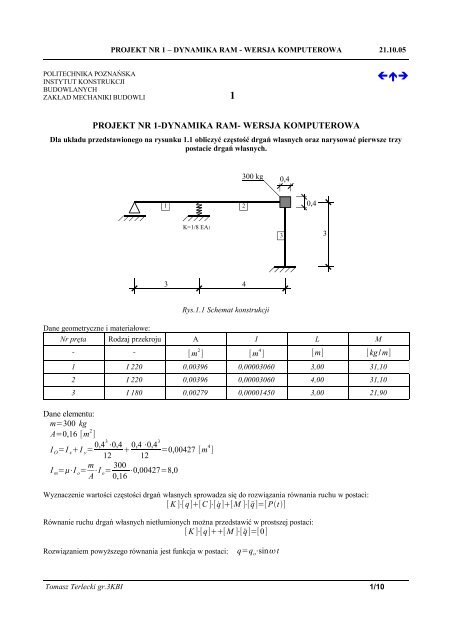
Dla układu przedstawionego na rysunku 1.1 obliczyć częstość drgań własnych oraz narysować pierwsze trzy<br />
postacie drgań własnych.<br />
300 kg<br />
0,4<br />
1 2<br />
0,4<br />
K=1/8 EA1<br />
3<br />
3<br />
3 4<br />
Rys.1.1 Schemat konstrukcji<br />
Dane geometryczne i materiałowe:<br />
Nr pręta Rodzaj przekroju A I L M<br />
Dane elementu:<br />
m=300 kg<br />
A=0,16 [m 2 ]<br />
- - [m 2 ] [m 4 ] [m] [kg /m]<br />
1 I 220 0,00396 0,00003060 3,00 31,10<br />
2 I 220 0,00396 0,00003060 4,00 31,10<br />
3 I <strong>18</strong>0 0,00279 0,00001450 3,00 21,90<br />
I O =I x I y = 0,43 ⋅0,4<br />
<br />
12<br />
0,4 ⋅0,43<br />
=0,00427 [m 4 ]<br />
12<br />
I m =⋅I o = m A ⋅I o= 300<br />
0,16 ⋅0,00427=8,0<br />
Wyznaczenie wartości częstości drgań własnych sprowadza się do rozwiązania równania ruchu w postaci:<br />
[ K ]⋅[q][C ]⋅[ ˙q][M ]⋅[ ¨q]=[ Pt]<br />
Równanie ruchu drgań własnych nietłumionych można przedstawić w prostszej postaci:<br />
[ K ]⋅[q][M ]⋅[ ¨q]=[0]<br />
Rozwiązaniem powyższego równania jest funkcja w postaci:<br />
q=q o ⋅sint<br />
Tomasz Terlecki gr.3KBI 1/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Ostatecznie równanie można przedstawić w postaci:<br />
[ K ]−[M ]⋅q o =0<br />
gdzie: = 2<br />
Przyjęcie układu globalnego oraz lokalnego dla poszczególnych prętów oraz numeracja przemieszczeń węzłowych:<br />
x<br />
y<br />
q 3 q q 6 1<br />
q 4<br />
q<br />
x~<br />
x~ y~<br />
7<br />
y~<br />
y~ x ~ q 8<br />
q 2<br />
q 5<br />
q 9<br />
q 10<br />
q 12<br />
q 11<br />
Rys 1.2 Przyjęcie układów lokalnych oraz przemieszczeń węzłowych<br />
Łatwo zauważyć, że dla tak przyjętego układu globalnego transformacje macierzy sztywności oraz macierzy mas<br />
transformacji należy dokonać tylko dla pręta nr 3. Kąt pomiędzy układem globalnym a układem lokalnym dla tego<br />
pręta wynosi =−90 0 .<br />
W zadaniu wygodnie jest przyjąć redukcję statyczną prętów dlatego pręt nr 1 potraktuję jako pręt z przegubem na<br />
lewym końcu. Pozostałe pręty są obustronnie utwierdzone.<br />
Macierze sztywności<br />
Pręt nr 1 z przegubem na lewym końcu:<br />
[<br />
EAl 2 0 0 −EAl 2 ]<br />
0 0<br />
0 3 EI 0 0 −3 EI 3 EIl<br />
[K e<br />
]= 1 0 0 0 0 0 0<br />
l 3 −EAl 2 0 0 EAl 2 0 0<br />
0 −3 EI 0 0 3 EI −3 EIl<br />
0 3 EIl 0 0 −3 EIl 3 EIl 2<br />
Pręt nr 2 oraz 3 obustronnie utwierdzony:<br />
[<br />
EAl 2 0 0 −EAl 2 ]<br />
0 0<br />
0 12 EI 6 EIl 0 −12 EI 6 EIl<br />
[K e<br />
]= 1 0 6 EIl 4 EIl 2 0 −6 EIl 2 EIl 2<br />
l 3 −EAl 2 0 0 EAl 2 0 0<br />
0 −12 EI −6 EIl 0 12 EI −6 EIl<br />
0 6 EIl 2 EIl 2 0 −6 EIl 4 EIl 2<br />
Tomasz Terlecki gr.3KBI 2/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Po podstawieniu wartości do macierzy otrzymamy:<br />
Pręt nr 1: macierz sztywności w układzie lokalnym jest identyczna z macierzą sztywności w układzie globalnym<br />
[K 1 ]=[ K 1 ]<br />
270600000 0 0 -270600000 0 0<br />
0 697000 0 0 -697000 2091000<br />
0 0 0 0 0 0<br />
-270600000 0 0 270600000 0 0<br />
0 -697000 0 0 697000 -2091000<br />
0 2091000 0 0 -2091000 6273000<br />
Pręt nr 2: macierz sztywności w układzie lokalnym jest identyczna z macierzą sztywności w układzie globalnym<br />
[K 2 ]=[ K 2 ]<br />
202950000 0 0 -202950000 0 0<br />
0 1176<strong>18</strong>7,5 2352375 0 -1176<strong>18</strong>7,5 2352375<br />
0 2352375 6273000 0 -2352375 3136500<br />
-202950000 0 0 202950000 0 0<br />
0 -1176<strong>18</strong>7,5 -2352375 0 1176<strong>18</strong>7,5 -2352375<br />
0 2352375 3136500 0 -2352375 6273000<br />
Pręt nr 3: macierz sztywności w układzie lokalnym<br />
[K 3 ]<br />
190650000 0 0 -190650000 0 0<br />
0 1321111,11 1981666,67 0 -1321111,11 1981666,67<br />
0 1981666,67 3963333,33 0 -1981666,67 1981666,67<br />
-190650000 0 0 190650000 0 0<br />
0 -1321111,11 -1981666,67 0 1321111,11 -1981666,67<br />
0 1981666,67 1981666,67 0 -1981666,67 3963333,33<br />
Transformacja do układu globalnego wg zależności:<br />
=[<br />
[ K e ]=[T ] T ⋅[K e ]⋅[T ]<br />
gdzie macierz transformacji jest w postaci:<br />
cos sin 0 0 0 0<br />
1]<br />
−sin cos 0 0 0 0<br />
0 0 1 0 0 0<br />
T<br />
0 0 0 cos sin 0<br />
0 0 0 −sin cos 0<br />
0 0 0 0 0<br />
Zatem po transformacji (dla =90 ) otrzymamy:<br />
[ K 3 ]<br />
1321111,11 0 -1981666,67 -1321111,11 0 -1981666,67<br />
0 190650000 0 0 -190650000 0<br />
-1981666,67 0 3963333,33 1981666,67 0 1981666,67<br />
-1321111,11 0 1981666,67 1321111,11 0 1981666,67<br />
0 -190650000 0 0 190650000 0<br />
-1981666,67 0 1981666,67 1981666,67 0 3963333,33<br />
Tomasz Terlecki gr.3KBI 3/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Pręt nr 1 z przegubem na lewym końcu:<br />
Macierze mas<br />
⋅[140 0 0 70 0 0<br />
]<br />
0 99 0 0 58,5 −16,5 l<br />
[M e<br />
]= ⋅l 0 0 0 0 0 0<br />
420 70 0 0 140 0 0<br />
0 58,5 0 0 204 −36 l<br />
0 −16,5 l 0 0 −36 l 8l 2<br />
Pręt nr 2 oraz 3 obustronnie utwierdzony:<br />
[140 0 0 70 0 0<br />
]<br />
0 156 22 l 0 54 −13 l<br />
[M e<br />
]= ⋅l 0 22 l 4 l 2 0 13 l −3 l 2<br />
420 70 0 0 140 0 0<br />
0 54 13 l 0 156 −22l<br />
0 −13l −3 l 2 0 −22 l 4 l 2<br />
Po podstawieniu wartości do macierzy otrzymamy:<br />
Pręt nr 1: macierz mas w układzie lokalnym jest równa macierzy mas w układzie globalnym<br />
⋅l<br />
420 = 31,1⋅3<br />
420 =0,22 [M 1 ]=[M 1 ]<br />
31,1 0 0 15,55 0 0<br />
0 21,99 0 0 13 -11<br />
0 0 0 0 0 0<br />
15,55 0 0 31,1 0 0<br />
0 13 0 0 45,32 -23,99<br />
0 -11 0 0 -23,99 15,99<br />
Pręt nr 2: macierz mas w układzie lokalnym jest równa macierzy mas w układzie globalnym<br />
⋅l<br />
420 = 31,1⋅4<br />
420 =0,3 [M 2 ]=[M 2 ]<br />
41,47 0 0 20,73 0 0<br />
0 46,21 26,06 0 15,99 -15,4<br />
0 26,06 <strong>18</strong>,96 0 15,4 -14,22<br />
20,73 0 0 41,47 0 0<br />
0 15,99 15,4 0 46,21 -26,06<br />
0 -15,4 -14,22 0 -26,06 <strong>18</strong>,96<br />
Tomasz Terlecki gr.3KBI 4/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Pręt nr 3: macierz mas w układzie lokalnym<br />
[M 3 ]<br />
21,9 0 0 10,95 0 0<br />
0 24,4 10,32 0 8,45 -6,1<br />
0 10,32 5,63 0 6,1 -4,22<br />
10,95 0 0 21,9 0 0<br />
0 8,45 6,1 0 24,4 -10,32<br />
0 -6,1 -4,22 0 -10,32 5,63<br />
Transformacja do układu globalnego wg zależności:<br />
=[<br />
[M e ]=[T ] T ⋅[M e ]⋅[T ]<br />
gdzie macierz transformacji jest w postaci:<br />
cos sin 0 0 0 0<br />
1]<br />
−sin cos 0 0 0 0<br />
0 0 1 0 0 0<br />
T<br />
0 0 0 cos sin 0<br />
0 0 0 −sin cos 0<br />
0 0 0 0 0<br />
Zatem po transformacji (dla =90 ) otrzymamy:<br />
[M 3 ]<br />
24,4 0 -10,32 8,45 0 6,1<br />
0 21,9 0 0 10,95 0<br />
-10,32 0 5,63 -6,1 0 -4,22<br />
8,45 0 -6,1 24,4 0 10,32<br />
0 10,95 0 0 21,9 0<br />
6,1 0 -4,22 10,32 0 5,63<br />
Następnym krokiem będzie utworzenie tabeli powiązań pomocnej do agregacji macierzy sztywności oraz macierzy<br />
mas.<br />
numer przemieszczenia<br />
Nr preta 1 2 3 4 5 6<br />
1 1 2 3 4 5 6<br />
2 4 5 6 7 8 9<br />
3 7 8 9 10 11 12<br />
Podczas agregacji macierzy sztywności należy pamiętać o uwzględnieniu współczynnika k podpory sprężystej po<br />
kierunku przemieszczenia q 5 . Przy agregacji macierzy mas natomiast należy uwzględnić dodatkowe wartości<br />
(masę elementu po kierunku przemieszczenia q 7 i g 8 oraz wartość I m po kierunku q 9 .<br />
Agregację macierzy sztywności oraz macierzy mas pokazano schematycznie na rysunkach 1.3 oraz 1.4.<br />
Tomasz Terlecki gr.3KBI 5/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Schemat agregacji macierzy sztywności<br />
- 1 2 3 4 5 6 7 8 9 10 11 12<br />
1<br />
2<br />
3<br />
4<br />
5 K<br />
6<br />
7<br />
8<br />
9<br />
10<br />
11<br />
12<br />
Schemat agregacji macierzy mas<br />
- 1 2 3 4 5 6 7 8 9 10 11 12<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7 +m<br />
8 +m<br />
9 I m<br />
10<br />
11<br />
12<br />
Pręt nr 1<br />
Pręt nr 2<br />
Pręt nr 3<br />
Po wykonaniu agregacji należy uwzględnić warunki brzegowe. Można zatem napisać:<br />
q 2 =q 10 =q 11 =q 12 =0<br />
oraz uwzględniając redukcję pręta nr 1:<br />
q 1 ≠0<br />
Otrzymujemy ostatecznie macierze 7x7<br />
Macierz sztywności:<br />
270600000 -270600000 0 0 0 0 0<br />
-270600000 473550000 0 0 -202950000 0 0<br />
0 0 73366937,50000 261375 0 -1176<strong>18</strong>7,5 2352375<br />
0 0 261375 12546000 0 -2352375 3136500<br />
0 -202950000 0 0 204271111,11 0 -1981666,67<br />
0 0 -1176<strong>18</strong>7,5 -2352375 0 19<strong>18</strong>26<strong>18</strong>7,5 -2352375<br />
0 0 2352375 3136500 -1981666,67 -2352375 10236333,33<br />
Tomasz Terlecki gr.3KBI 6/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Macierz mas:<br />
31,1 15,55 0 0 0 0 0<br />
15,55 72,57 0 0 20,73 0 0<br />
0 0 91,52 2,07 0 15,99 -15,4<br />
0 0 2,07 34,95 0 15,4 -14,22<br />
0 20,73 0 0 365,87 0 -10,32<br />
0 0 15,99 15,4 0 368,11 -26,06<br />
0 0 -15,4 -14,22 -10,32 -26,06 32,59<br />
Podstawiając macierze do równania [ K ]−[M ]⋅q o =0 możemy wyznaczyć wartości własne oraz wektory<br />
własne. Rozwiązując powyższe równanie w programie „upw” otrzymano następujące wyniki:<br />
Wektory własne:<br />
- <br />
- [rad 2 / s 2 ] [rad / s]<br />
1 1670,470 40,87<br />
2 161610,000 402,01<br />
3 557627,000 746,74<br />
4 617705,000 785,94<br />
5 1095710,000 1046,76<br />
6 2031320,000 1425,24<br />
7 20375300,000 4513,9<br />
Wektor nr 1 Wektor nr 2 Wektor nr 3 Wektor nr 4 Wektor nr 5 Wektor nr 6 Wektor nr 7<br />
-0,9471650 -0,0021386 0,0041349 -0,0216296 -0,0430655 1,0000000 -1,0000000<br />
-0,9468930 -0,0020795 0,0037497 -0,0194052 -0,0354125 0,6864150 0,6<strong>18</strong>0620<br />
0,0062869 -0,0453563 0,2083620 0,5306280 -0,6634130 -0,05691<strong>18</strong> -0,0038386<br />
0,0501193 -0,4299380 -0,9035240 -1,1707800 -0,6743220 -0,1071100 -0,0093746<br />
-0,9456810 -0,00<strong>18</strong>241 0,002<strong>18</strong>73 -0,0104690 -0,0069416 -0,3196040 -0,0540016<br />
-0,0017506 -0,0243698 0,7719160 -0,1627000 -0,0043407 -0,0093992 -0,0011738<br />
-0,1998750 0,5233680 0,2130360 -1,0048300 -1,0032300 -0,2123870 -0,0242089<br />
W celu narysowania postaci drgań odpowiadające trzem pierwszym częstością drgań własnych posłużymy się<br />
funkcjami kształtu:<br />
Pręt z przegubem na lewym końcu<br />
Pręt obustronnie utwierdzony<br />
N 1 x=1− x l<br />
N 2 x=1− 3<br />
2 ⋅x l x l 3<br />
-<br />
N 1 x=1− x l<br />
N 2 x=1−3 ⋅ x l 2<br />
2 ⋅ x l 3<br />
N 3 x=x⋅[1−2 ⋅ x l x l 2]<br />
N 4 x= x l<br />
N 5 x= 3<br />
2 ⋅x l − x l 3<br />
N 4 x= x l<br />
N 5 x=3 ⋅ x l 2<br />
−2 ⋅ x l 3<br />
N 6 x=x⋅[ −1<br />
2 1<br />
2 ⋅ x 2<br />
l ] N 6 x=x⋅[ −x x 2]<br />
l l <br />
Tomasz Terlecki gr.3KBI 7/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
W celu dokładniejszego opisu przemieszczeń na długości pręta wartości funkcji kształtu obliczono również dla 3<br />
dodatkowych punktów leżących na tym pręcie.<br />
ux=q 1 ⋅N 1 xq 4 ⋅N 4 x<br />
ux=q 2 ⋅N 2 xq 3 ⋅N 3 xq 5 ⋅N 5 xq 6 ⋅N 6 x<br />
Pierwsza postać drgań<br />
Przemieszczenia węzłowe dla prętów w układzie lokalnym, wartości funkcji kształtu oraz wartości przemieszczeń<br />
przedstawiono w tabeli:<br />
Pręt 1<br />
X q N 1 N 2 N 3 N 4 N 5 N 6 U [m] V [m]<br />
0 -0,9471650 1,0000000 1,0000000 - 0,0000000 0,0000000 0,0000000 -0,9471650 0,0000000<br />
0,75 0,0000000 0,7500000 0,6328125 - 0,2500000 0,367<strong>18</strong>75 -0,3515625 -0,9470970 -0,0153116<br />
1,5 - 0,5000000 0,3125000 - 0,5000000 0,6875000 -0,5625000 -0,9470290 -0,0238699<br />
2,25 -0,9468930 0,2500000 0,0859375 - 0,7500000 0,9140625 -0,492<strong>18</strong>75 -0,9469610 -0,0<strong>18</strong>9215<br />
3 0,0062869 0,0000000 0,0000000 - 1,0000000 1,0000000 0,0000000 -0,9468930 0,0062869<br />
0,0501193<br />
Pręt 2<br />
X q N 1 N 2 N 3 N 4 N 5 N 6 U [m] V [m]<br />
0 -0,9468930 1 1 0 0 0 0 -0,9468930 0,0062869<br />
1 0,0062869 0,75 0,84 0,56 0,25 0,16 -0,19 -0,9465900 0,0706997<br />
2 0,0501193 0,5 0,5 0,5 0,5 0,5 -0,5 -0,9462870 0,1272653<br />
3 -0,9456810 0,25 0,16 0,19 0,75 0,84 -0,56 -0,9459840 0,1213323<br />
4 -0,0017506 0 0 0 1 1 0 -0,9456810 -0,0017506<br />
-0,1998750<br />
Pręt 3<br />
X q N 1 N 2 N 3 N 4 N 5 N 6 U [m] V [m]<br />
0 -0,0017506 1 1 0 0 0 0 -0,0017506 0,9456810<br />
0,75 0,9456810 0,75 0,84 0,42 0,25 0,16 -0,14 -0,0013129 0,713596<br />
1,5 -0,1998750 0,5 0,5 0,38 0,5 0,5 -0,38 -0,0008753 0,3978874<br />
2,25 0,0000000 0,25 0,16 0,14 0,75 0,84 -0,42 -0,0004376 0,1196552<br />
3 0,0000000 0 0 0 1 1 0 0,0000000 0,0000000<br />
0,0000000<br />
Tomasz Terlecki gr.3KBI 8/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Druga postać drgań<br />
Przemieszczenia węzłowe dla prętów w układzie lokalnym, wartości funkcji kształtu oraz wartości przemieszczeń<br />
przedstawiono w tabeli:<br />
Pręt 1<br />
X<br />
q N 1 N 2 N 3 N 4 N 5 N 6<br />
U [m] V [m]<br />
0 -0,0021386 1,0000000 1,0000000 - 0,0000000 0,0000000 0,0000000 -0,0021386 0,0000000<br />
0,75 0,0000000 0,7500000 0,6328125 - 0,2500000 0,367<strong>18</strong>75 -0,3515625 -0,0021238 0,1344958<br />
1,5 - 0,5000000 0,3125000 - 0,5000000 0,6875000 -0,5625000 -0,0021090 0,2106577<br />
2,25 -0,0020795 0,2500000 0,0859375 - 0,7500000 0,9140625 -0,492<strong>18</strong>75 -0,0020943 0,1701516<br />
3 -0,0453563 0,0000000 0,0000000 - 1,0000000 1,0000000 0,0000000 -0,0020795 -0,0453563<br />
-0,4299380<br />
Pręt 2<br />
X<br />
q N 1 N 2 N 3 N 4 N 5 N 6<br />
U [m] V [m]<br />
0 -0,0020795 1 1 0 0 0 0 -0,0020795 -0,0453563<br />
1 -0,0453563 0,75 0,84 0,56 0,25 0,16 -0,19 -0,0020157 -0,3820488<br />
2 -0,4299380 0,5 0,5 0,5 0,5 0,5 -0,5 -0,00195<strong>18</strong> -0,5115161<br />
3 -0,00<strong>18</strong>241 0,25 0,16 0,19 0,75 0,84 -0,56 -0,00<strong>18</strong>879 -0,4026568<br />
4 -0,0243698 0 0 0 1 1 0 -0,00<strong>18</strong>241 -0,0243698<br />
0,5233680<br />
Pręt 3<br />
X<br />
q N 1 N 2 N 3 N 4 N 5 N 6<br />
U [m] V [m]<br />
0 -0,0243698 1 1 0 0 0 0 -0,0243698 0,00<strong>18</strong>241<br />
0,75 0,00<strong>18</strong>241 0,75 0,84 0,42 0,25 0,16 -0,14 -0,0<strong>18</strong>2774 0,2223349<br />
1,5 0,5233680 0,5 0,5 0,38 0,5 0,5 -0,38 -0,012<strong>18</strong>49 0,1971750<br />
2,25 0,0000000 0,25 0,16 0,14 0,75 0,84 -0,42 -0,0060925 0,0738836<br />
3 0,0000000 0 0 0 1 1 0 0,0000000 0,0000000<br />
0,0000000<br />
Tomasz Terlecki gr.3KBI 9/10
PROJEKT NR 1 – DYNAMIKA RAM - WERSJA KOMPUTEROWA 21.10.05<br />
Trzecia postać drgań<br />
Przemieszczenia węzłowe dla prętów w układzie lokalnym, wartości funkcji kształtu oraz wartości przemieszczeń<br />
przedstawiono w tabeli:<br />
Pret 1<br />
X<br />
q N 1 N 2 N 3 N 4 N 5 N 6<br />
U [m] V [m]<br />
0 0,0041349 1,0000000 1,0000000 - 0,0000000 0,0000000 0,0000000 0,0041349 0,0000000<br />
0,75 0,0000000 0,7500000 0,6328125 - 0,2500000 0,367<strong>18</strong>75 -0,3515625 0,0040386 0,3941531<br />
1,5 - 0,5000000 0,3125000 - 0,5000000 0,6875000 -0,5625000 0,0039423 0,6514811<br />
2,25 0,0037497 0,2500000 0,0859375 - 0,7500000 0,9140625 -0,492<strong>18</strong>75 0,0038460 0,6351591<br />
3 0,2083620 0,0000000 0,0000000 - 1,0000000 1,0000000 0,0000000 0,0037497 0,2083620<br />
-0,9035240<br />
Pret 2<br />
X<br />
q N 1 N 2 N 3 N 4 N 5 N 6<br />
U [m] V [m]<br />
0 0,0037497 1 1 0 0 0 0 0,0037497 0,2083620<br />
1 0,2083620 0,75 0,84 0,56 0,25 0,16 -0,19 0,0033591 -0,2517592<br />
2 -0,9035240 0,5 0,5 0,5 0,5 0,5 -0,5 0,0029685 -0,0681410<br />
3 0,002<strong>18</strong>73 0,25 0,16 0,19 0,75 0,84 -0,56 0,0025779 0,3946172<br />
4 0,7719160 0 0 0 1 1 0 0,002<strong>18</strong>73 0,7719160<br />
0,2130360<br />
Pret 3<br />
X<br />
q N 1 N 2 N 3 N 4 N 5 N 6<br />
U [m] V [m]<br />
0 0,7719160 1 1 0 0 0 0 0,7719160 -0,002<strong>18</strong>73<br />
0,75 -0,002<strong>18</strong>73 0,75 0,84 0,42 0,25 0,16 -0,14 0,5789370 0,0880291<br />
1,5 0,2130360 0,5 0,5 0,38 0,5 0,5 -0,38 0,3859580 0,0787949<br />
2,25 0,0000000 0,25 0,16 0,14 0,75 0,84 -0,42 0,1929790 0,0296164<br />
3 0,0000000 0 0 0 1 1 0 0,0000000 0,0000000<br />
0,0000000<br />
Tomasz Terlecki gr.3KBI 10/10














