

Metoda sił - rama przestrzenna 1
Metoda sił - rama przestrzenna 1
Metoda sił - rama przestrzenna 1

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Politechnika Poznanska<br />
Wydział Budownictwa, Architektury i Inżynierii<br />
Środowiska<br />
Konstrukcje Budowlane i Inżynierskie, grupa 3<br />
Projekt z Mechaniki Budowli<br />
Projekt 1 - Rama <strong>przestrzenna</strong><br />
Prowadzący ćwiczenia i konsultacje:<br />
Dr inż. Przemysław Litewka<br />
Projekt wykonał:<br />
Krystian Paczkowski<br />
10kN<br />
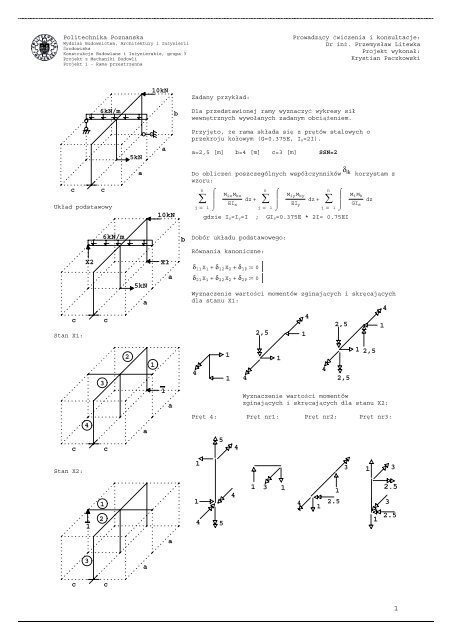
Zadany przykład:<br />
6kN/m<br />
b<br />
Dla przedstawionej ramy wyznaczyć wykresy sił<br />
wewnętrznych wywołanych zadanym obciążeniem.<br />
Przyjęto, że <strong>rama</strong> składa się z prętów stalowych o<br />
przekroju kołowym (G=0.375E, I s =2I).<br />
5kN<br />
a<br />
a=2,5 [m] b=4 [m] c=3 [m] SSN=2<br />
c<br />
c<br />
Układ podstawowy<br />
a<br />
10kN<br />
Do obliczeń poszczególnych współczynników δ ik korzystam z<br />
wzoru:<br />
n ⌠<br />
n ⌠<br />
M ix M<br />
⎮<br />
∑<br />
kx<br />
dz<br />
+<br />
⎮<br />
⎮ EI x<br />
∑<br />
⎮<br />
j = 1 ⌡<br />
j = 1 ⌡<br />
n ⌠<br />
M iy M ky<br />
dz<br />
+<br />
⎮<br />
EI y<br />
∑<br />
⎮<br />
j = 1 ⌡<br />
gdzie I x =I y =I ; GI s =0.375E * 2I= 0.75EI<br />
M i M k<br />
dz<br />
GI s<br />
6kN/m<br />
b<br />
Dobór układu podstawowego:<br />
Równania kanoniczne:<br />
X2<br />
5kN<br />
a<br />
X1<br />
a<br />
δ 11 X 1 + δ 12 X 2 + δ 1P := 0<br />
δ 21 X 1 + δ 22 X 2 + δ 2P := 0<br />
Wyznaczenie wartości momentów zginających i skręcających<br />
dla stanu X1:<br />
c<br />
Stan X1:<br />
c<br />
2,5<br />
1<br />
4<br />
2,5<br />
1<br />
3<br />
2<br />
1<br />
1<br />
a<br />
4<br />
1<br />
1<br />
4<br />
1<br />
2,5<br />
1 2,5<br />
Wyznaczenie wartości momentów<br />
zginających i skręcających dla stanu X2:<br />
c<br />
4<br />
c<br />
a<br />
Pręt 4: Pręt nr1: Pręt nr2: Pręt nr3:<br />
5<br />
4<br />
Stan X2:<br />
1<br />
3<br />
1<br />
3<br />
1<br />
1<br />
2<br />
1<br />
4<br />
5<br />
4<br />
1 3 1<br />
4<br />
1<br />
1<br />
2.5<br />
3<br />
1 2.5<br />
a<br />
3<br />
a<br />
c<br />
c<br />
1
Politechnika Poznanska<br />
Wydział Budownictwa, Architektury i Inżynierii<br />
Środowiska<br />
Konstrukcje Budowlane i Inżynierskie, grupa 3<br />
Projekt z Mechaniki Budowli<br />
Projekt 1 - Rama <strong>przestrzenna</strong><br />
Prowadzący ćwiczenia i konsultacje:<br />
Dr inż. Przemysław Litewka<br />
Projekt wykonał:<br />
Krystian Paczkowski<br />
Stan P:<br />
Wykresy dla stanu X1:<br />
3<br />
+<br />
37.5<br />
Momentów zginających [m]:<br />
10kN<br />
4<br />
1<br />
6kN/m<br />
2.5<br />
3 4<br />
5 2<br />
4 5<br />
5kN<br />
6<br />
Momentów skręcających [m]:<br />
Wyznaczenie wartości momentów zginających i skręcających<br />
dla stanu P:<br />
4<br />
1<br />
2<br />
3 18<br />
25<br />
5 6<br />
+<br />
10<br />
20<br />
5 4 18 5 25 20<br />
36<br />
6<br />
+ 6<br />
36<br />
5<br />
10<br />
5 27 18<br />
36 90<br />
27 18 90 5<br />
20 5<br />
Wykresy dla stanu X2:<br />
20 37.5<br />
Momentów zginających [m]:<br />
90 5<br />
40 37.5<br />
36<br />
2.5 3<br />
Wykresy dla stanu P:<br />
2.5<br />
3<br />
Momentów zginających [kNm]: Momentów skręcających [kNm]:<br />
27<br />
Momentów skręcających [m]:<br />
20<br />
25<br />
20<br />
-<br />
90<br />
20 37.5<br />
90<br />
90<br />
40<br />
+<br />
2
Politechnika Poznanska<br />
Wydział Budownictwa, Architektury i Inżynierii<br />
Środowiska<br />
Konstrukcje Budowlane i Inżynierskie, grupa 3<br />
Projekt z Mechaniki Budowli<br />
Projekt 1 - Rama <strong>przestrzenna</strong><br />
Prowadzący ćwiczenia i konsultacje:<br />
Dr inż. Przemysław Litewka<br />
Projekt wykonał:<br />
Krystian Paczkowski<br />
Obliczenia współczynników δik :<br />
1<br />
EJδ 11<br />
2 ⋅ 4 ⋅ 4 2 1<br />
⋅ ⋅ 4<br />
3 2 ⋅ 5 ⋅ 5 2 1<br />
+ ⋅ ⋅ 5<br />
3 2 ⋅ 4 ⋅ 4 2 1<br />
:=<br />
+ ⋅ ⋅ 4 + ⋅ ( 5 ⋅ 4 ⋅ 5 + 4 ⋅ 5 ⋅ 4)<br />
3 0.75<br />
EJδ 11 := 324.333<br />
1<br />
EJδ 12<br />
2 ⋅ 4 ⋅ 4 ⋅ 3 1<br />
:=<br />
+ ⋅ ( 4 ⋅ 2.5 ⋅ 3)<br />
0.75<br />
EJδ 12 := 64<br />
1<br />
EJδ 22<br />
2 ⋅ 3 ⋅ 3 2 1<br />
⋅ ⋅ 3<br />
3 2 ⋅ 2.5 ⋅ 2.5 2<br />
1<br />
:=<br />
+ ⋅ ⋅ 2.5 + 3 ⋅ 4 ⋅ 3 + 2.5 ⋅ 4 ⋅ 2.5 + ⋅ ( 3 ⋅ 2.5 ⋅ 3)<br />
3<br />
0.75<br />
EJδ 22 := 105.208<br />
1<br />
EJδ 1P<br />
2 20 ⋅ 4 −2<br />
⋅<br />
⎛<br />
⎜<br />
3 4 ⎞ 1<br />
2 40 ⋅ 4 −1<br />
+ ⋅<br />
⎛<br />
⎜<br />
3 4 ⎞ 1<br />
25 2.5<br />
2 ⋅ 2<br />
3 2.5 1<br />
+<br />
⎛<br />
⎜ + 3 5 ⎞ 1<br />
37.5 2.5<br />
2 ⋅ ⎛ 2<br />
3 5 1<br />
:=<br />
+ ⎜ + 3 2.5<br />
⎝<br />
⎠<br />
1<br />
0.75 ( 37.5 ⋅ 4 ⋅ 5 − 20 ⋅ 2.5 ⋅ 4)<br />
EJδ 1P := 871.56249999999999999<br />
1<br />
1<br />
EJδ 2P ⋅ ⋅ ( 20 + 40)<br />
⋅ 4 ⋅ ( −3)<br />
+ 90 ⋅ 4 ⋅ −2.5<br />
2<br />
2 ⋅ 2.5 ⋅ 90 ⎛ −2<br />
:=<br />
+<br />
⋅ ⎜ ⋅ 2.5<br />
3<br />
EJδ 2P := −1708.2500000000000000<br />
⎝<br />
⎠<br />
⎝<br />
⎝<br />
⎠<br />
⎞<br />
⎠<br />
1<br />
2 ⋅ 27 ⋅ 3 −2<br />
+<br />
⋅ ⎜ ⋅ 3<br />
3<br />
⎝<br />
⎛<br />
⎝<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
+ 1<br />
2.5 25<br />
2 ⋅ ⋅ 2<br />
3 2.5<br />
2 6 ⋅ 3 2<br />
1<br />
+ ⋅ ⋅ 3 ⋅ 1.5 + ( −20<br />
⋅ 2.5 ⋅ 3)<br />
3 8<br />
0.75<br />
Z czego wynika:<br />
324.333 ⋅ X 1 + 64 ⋅ X 2 := −871.5625<br />
64 ⋅ X 1 + 105.208 ⋅ X 2 := 1708.25<br />
Z czego otrzymujemy:<br />
X 1 := −6.69482<br />
X 2 := 20.3095<br />
[kN]<br />
Korzystając z zasady superpozycji otrzymuję wykresy momentów rzeczywistych:<br />
S n := S p + S 1 ⋅ X 1 + S 2 ⋅ X 2<br />
Wykres momentów zginających:<br />
M[kNm]<br />
Wykres momentów skręcających:<br />
[kNm]<br />
26.779<br />
39.226<br />
20<br />
27<br />
33.929<br />
14.149<br />
+<br />
-<br />
26.779<br />
14.149<br />
4.0259<br />
8.26295<br />
4.0259<br />
+<br />
20.929<br />
39.226<br />
3
Politechnika Poznanska<br />
Wydział Budownictwa, Architektury i Inżynierii<br />
Środowiska<br />
Konstrukcje Budowlane i Inżynierskie, grupa 3<br />
Projekt z Mechaniki Budowli<br />
Projekt 1 - Rama <strong>przestrzenna</strong><br />
Prowadzący ćwiczenia i konsultacje:<br />
Dr inż. Przemysław Litewka<br />
Projekt wykonał:<br />
Krystian Paczkowski<br />
Sprawdzenie kinematyczne:<br />
Przyjmuje jako układ wirtualny,układ X1,przykładając w miejscu siły X1 siłę wirtualną równą 1.<br />
1<br />
2 ⋅ 14.149 ⋅ 4 2 1<br />
⋅ ⋅ 4<br />
3 2 ⋅ 20.929 ⋅ 4 1 1<br />
+<br />
⋅ ⋅ 4<br />
3 2 ⋅ 4.0259 ⋅ 2.5 2<br />
3 ⋅ 5 1<br />
1 ⎯ ⋅ δ :=<br />
+<br />
⋅ ⎜ + 3 ⋅ 2.5<br />
1<br />
2 ⋅ 2.5 ⋅ 8.26295<br />
2 1<br />
⋅ ⋅ 2.5<br />
3 2 ⋅ 26.779 ⋅ 4<br />
−2<br />
+<br />
⋅ ⎜ ⋅ 4<br />
3<br />
⎛<br />
⎝<br />
⎞<br />
⎠<br />
⎛<br />
⎝<br />
⎞<br />
⎠<br />
⎛<br />
⎝<br />
1<br />
2 ⋅ 8.26295 ⋅ 2.5 2.5 2 1<br />
+<br />
⋅ ⎜ ⋅<br />
3<br />
+ 3 ⋅ 5<br />
1<br />
+ ⋅ ( 4.0259 ⋅ 4 ⋅ 5 + 14.149 ⋅ 2.5 ⋅ 4 − 26.779 ⋅ 2.5 ⋅ 4)<br />
0.75<br />
⎞<br />
⎠<br />
1 ⎯ ⋅ δ<br />
:=<br />
1.9666666666666665 ⋅ 10 -2<br />
EJ<br />
[m] Wynik jest bliski zeru zatem obliczenia uznaję za poprawne.<br />
Błąd procentowy wynosi:<br />
1 ⎯ ⋅ δ := 61.06233333333333333 + −61.042666666666666665<br />
1.9666666666666665 ⋅ 10 -2<br />
61.06233333333333333<br />
=<br />
3.221 × 10 − 4<br />
Błąd jest < 0,1% zatem zakładam, że kontrola jest poprawna.<br />
Kontrolne sprawdzenie dla drugiego układu wirtualnego, przyjmuję w miejscu siły X2 siłę<br />
wirtualną równą 1.<br />
1<br />
2 ⋅ 3 ⋅ 33.929 2 2 6 ⋅ 3 2<br />
1<br />
⋅ ⋅ 3 + ⋅ ⋅ 3 ⋅ 1.5<br />
3 3 8<br />
2 ⋅ 2.5 ⋅ 39.226 2<br />
1 ⎯ ⋅ δ :=<br />
+ ⋅ ⋅ ( −2.5)<br />
+ 39.226 ⋅ 4 ⋅ ( −2.5)<br />
3<br />
1<br />
1<br />
⋅ ( 14.149 + 20.929)<br />
⋅ 4 ⋅ 3 + ⋅ ( 14.149 ⋅ 2.5 ⋅ 3)<br />
2<br />
0.75<br />
1 ⎯ ⋅ δ<br />
:=<br />
obliczeń.<br />
1.416666666666667 ⋅ 10 -2<br />
EJ [m] Wynik jest bliski zeru, co jest potwierdzeniem poprawności<br />
Wykres sil Normalnych występujących w ramie:<br />
Wykres sil Tnących występujących w ramie:<br />
15.6905<br />
-<br />
20.31<br />
1.695<br />
1.695<br />
2.31<br />
-<br />
-<br />
+<br />
-<br />
15.69 5<br />
-<br />
-<br />
3.305<br />
18<br />
-<br />
6.695<br />
N[kN]<br />
T[kN]<br />
4














