Statyka kratownicy stalowej o 3 różnych przekrojach prÄtów
Statyka kratownicy stalowej o 3 różnych przekrojach prÄtów
Statyka kratownicy stalowej o 3 różnych przekrojach prÄtów

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
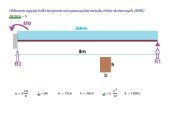
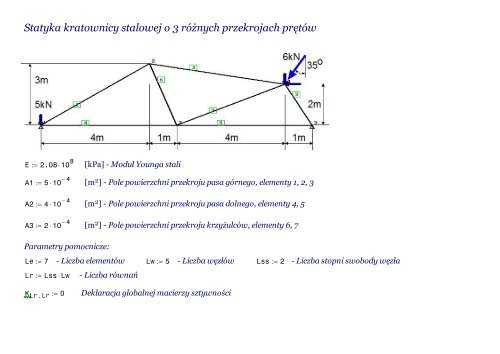
<strong>Statyka</strong> <strong>kratownicy</strong> <strong>stalowej</strong> o 3 różnych <strong>przekrojach</strong> prętów<br />
E 2.08 10 8 [kPa] - Moduł Younga stali<br />
A1 5 10 4 [m 2 ] - Pole powierzchni przekroju pasa górnego, elementy 1, 2, 3<br />
A2 4 10 4 [m 2 ] - Pole powierzchni przekroju pasa dolnego, elementy 4, 5<br />
A3 2 10 4 [m 2 ] - Pole powierzchni przekroju krzyżulców, elementy 6, 7<br />
Parametry pomocnicze:<br />
Le 7 - Liczba elementów Lw 5 - Liczba węzłów Lss 2 - Liczba stopni swobody węzła<br />
Lr Lss Lw - Liczba równań<br />
K Lr Lr 0 Deklaracja globalnej macierzy sztywności
Współrzędne węzłów <strong>kratownicy</strong><br />
X<br />
0<br />
4<br />
5<br />
9<br />
Y<br />
0<br />
3<br />
0<br />
2<br />
A<br />
A1<br />
A2<br />
A3<br />
Przekroje elementów<br />
10<br />
0<br />
1<br />
1<br />
Numery węzłów początkowych (Wp)<br />
i końcowych (Wk) wszystkich elementów<br />
Np<br />
1<br />
2<br />
Numery przekrojów elementów<br />
1<br />
2<br />
4<br />
2<br />
4<br />
5<br />
2<br />
3<br />
3<br />
Wp<br />
1<br />
Wk<br />
3<br />
3<br />
5<br />
2<br />
3<br />
3<br />
4
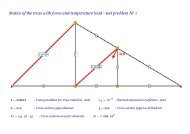
e 1 Le Pętla po wszystkich elementach <strong>kratownicy</strong><br />
Rysunek elementów <strong>kratownicy</strong> pozwala kontrolować poprawność wprowadzonych danych<br />
Ex e<br />
X Wpe<br />
X Wke<br />
Ey e<br />
Y Wpe<br />
Y Wke<br />
4<br />
Ey 1<br />
Ey 2<br />
Ey 3<br />
Ey 4<br />
Ey 5<br />
Ey 6<br />
3<br />
2<br />
1<br />
Ey 7<br />
1 0 1 2 3 4 5 6 7 8 9 10 11<br />
Ex 1 Ex 2 Ex 3 Ex 4 Ex 5 Ex 6 Ex 7<br />
1
Macierze sztywności elementów <strong>kratownicy</strong><br />
Lx e X Wke<br />
X Wpe<br />
Lx T ( 4 5 1 5 5 1 4 )<br />
Ly e Y Wke<br />
Y Wpe<br />
Ly T ( 3 1 2 0 0 3 2 )<br />
L e Lx e<br />
2<br />
Ly e<br />
2<br />
L T ( 5.000 5.099 2.236 5.000 5.000 3.162 4.472 )<br />
J e<br />
E A Npe<br />
L e<br />
3<br />
Lx e<br />
2<br />
Lx e Ly e<br />
Lx e Ly e<br />
Ly e<br />
2<br />
Mimo, że nie jest to potrzebne w dalczych obliczeniach, można<br />
pokazać bloki J macierzy sztywności wszystkich elementów<br />
J 1<br />
1.331 10 4<br />
9.984 10 3 9.984 10 3<br />
7.488 10 3 J 2<br />
1.961 10 4<br />
3.922 10 3<br />
3.922 10 3 784.465<br />
9.302 10 3 1.86 10 4<br />
1.664 10 4<br />
J 3 J 4<br />
1.86 10 4 3.721 10 4 0<br />
0<br />
0<br />
J 5<br />
1.664 10 4<br />
0<br />
0<br />
0<br />
J 6<br />
1.316 10 3<br />
3.947 10 3 3.947 10 3<br />
1.184 10 4 J 7<br />
7.442 10 3<br />
3.721 10 3 1.86 10 3<br />
3.721 10 3
Agregacja, czyli dodawanie bloków macierzy sztywności elementów do macierzy globalnej<br />
i 1 Lss j 1 Lss<br />
Blok górny lewy, wiersz w:=Lss*Wp e +i-2, kolumna k:=Lss*Wp e +j-2<br />
K Lss Wpe 2 i<br />
Lss Wp e 2 j<br />
K Lss Wpe 2 i<br />
Lss Wp e 2 j<br />
J e i<br />
j<br />
Blok górny prawy, wiersz w:=Lss*Wp e +i-2, kolumna k:=Lss*Wk e +j-2<br />
K Lss Wpe 2 i<br />
Lss Wk e 2 j<br />
K Lss Wpe 2 i<br />
Lss Wk e 2 j<br />
J e i<br />
j<br />
Blok dolny lewy, wiersz w:=Lss*Wk e +i-2, kolumna k:=Lss*Wp e +j-2<br />
K Lss Wke 2 i<br />
Lss Wp e 2 j<br />
K Lss Wke 2 i<br />
Lss Wp e 2 j<br />
J e i<br />
j<br />
Blok dolny prawy, wiersz w:=Lss*Wk e +i-2, kolumna k:=Lss*Wk e +j-2<br />
K Lss Wke 2 i<br />
Lss Wk e 2 j<br />
K Lss Wke 2 i<br />
Lss Wk e 2 j<br />
J e i<br />
j
Globalna macierz sztywności K bez uwzględnienia warunków brzegowych jest osobliwa tzn. |K|=0<br />
K<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
1 2 3 4 5 6 7 8 9 10<br />
2.995·104<br />
9.984·103<br />
-1.331·104<br />
-9.984·103<br />
-1.664·104<br />
0 0 0 0 0<br />
9.984·103<br />
7.488·103<br />
-9.984·103<br />
-7.488·103<br />
0 0 0 0 0 0<br />
-1.331·104<br />
-9.984·103<br />
3.424·104<br />
2.115·103<br />
-1.316·103<br />
3.947·103<br />
-1.961·104<br />
3.922·103<br />
0 0<br />
-9.984·103<br />
-7.488·103<br />
2.115·103<br />
2.011·104<br />
3.947·103<br />
-1.184·104<br />
3.922·103<br />
-784.465 0 0<br />
-1.664·104<br />
0 -1.316·103<br />
3.947·103<br />
4.204·104<br />
-225.705 -7.442·103<br />
-3.721·103<br />
-1.664·104<br />
0<br />
0 0 3.947·103<br />
-1.184·104<br />
-225.705 1.37·104<br />
-3.721·103<br />
-1.86·103<br />
0 0<br />
0 0 -1.961·104<br />
3.922·103<br />
-7.442·103<br />
-3.721·103<br />
3.636·104<br />
-1.881·104<br />
-9.302·103<br />
1.86·104<br />
0 0 3.922·103<br />
-784.465 -3.721·103<br />
-1.86·103<br />
-1.881·104<br />
3.985·104<br />
1.86·104<br />
-3.721·104<br />
0 0 0 0 -1.664·104<br />
0 -9.302·103<br />
1.86·104<br />
2.594·104<br />
-1.86·104<br />
0 0 0 0 0 0 1.86·104<br />
-3.721·104<br />
-1.86·104<br />
3.721·104<br />
K 0<br />
Zamiast zera wyznacznik może być "bardzo małą" liczbą ze wzgledu<br />
na niedostateczną dokładność wyrazów macierzy sztywności
Globalny wektor sił węzłowych<br />
p<br />
0<br />
5<br />
0<br />
0<br />
0<br />
0<br />
Fx 4 6 sin π 35<br />
180<br />
Fy 4 6 cos π 35<br />
180<br />
3.441 Rzytowanie siły w węźle 4 na osie<br />
globalnego układu współrzędnych<br />
4.915<br />
Fx 4<br />
Fy 4<br />
p T 1 2 3 4 5 6 7 8 9 10<br />
1 0 -5 0 0 0 0 -3.441 -4.915 0 0<br />
0<br />
0
Kopiowanie Macierzy K i wektora p przed modyfikacją uwzględniającą warunki brzegowe<br />
K o K p o p<br />
Uwzględnienie warunków brzegowych<br />
węzeł Nr 1: stopień swobody s1 i s2, węzeł Nr 5: stopieńswobody s3 i s4<br />
s1 1 s2 2 s3 9 s4 10<br />
i 1 Lr<br />
K os1 i<br />
0 K os2 i<br />
0 K os3 i<br />
0 K os4 i<br />
0<br />
K oi s1<br />
0 K oi s2<br />
0 K oi s3<br />
0 K oi s4<br />
0<br />
K os1 s1<br />
1 K os2 s2<br />
1<br />
p os1 0 p os2 0<br />
K os3 s3<br />
1 K os4 s4<br />
1<br />
p os3 0 p os4 0
1 2 3 4 5 6 7 8 9 10<br />
1<br />
2<br />
3<br />
4<br />
0<br />
0<br />
0<br />
0<br />
3.424·104<br />
2.115·103<br />
2.115·103<br />
2.011·104<br />
-1.316·103<br />
3.947·103<br />
3.947·103<br />
-1.184·104<br />
-1.961·104<br />
3<br />
3<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
1 0 0 0 0 0 0 0 0 0<br />
0 1 0 0 0 0 0 0 0 0<br />
3.922·10 0 0<br />
3.922·10 -784.465 0 0<br />
0 0 -1.316·103<br />
3.947·103<br />
4.204·104<br />
-225.705 -7.442·103<br />
-3.721·103<br />
0 0<br />
0 0 3.947·103<br />
-1.184·104<br />
-225.705 1.37·104<br />
-3.721·103<br />
-1.86·103<br />
0 0<br />
0 0 -1.961·104<br />
3.922·103<br />
-7.442·103<br />
-3.721·103<br />
3.636·104<br />
-1.881·104<br />
0 0<br />
0 0 3.922·103<br />
-784.465 -3.721·103<br />
-1.86·103<br />
-1.881·104<br />
3.985·104<br />
0 0<br />
0 0 0 0 0 0 0 0 1 0<br />
0 0 0 0 0 0 0 0 0 1<br />
p o<br />
T 1 2 3 4 5 6 7 8 9 10<br />
1 0 0 0 0 0 0 -3.441 -4.915 0 0<br />
K o 8.723 10 25 - wyznacznik macierzy K o >0<br />
Rozwiązanie układu równań:<br />
u lsolve K o p o - wektor przemieszczeń węzłowych<br />
u T 1 2 3 4 5 6 7 8 9 10<br />
1 0 0 -2.022·10-4<br />
1.12·10-4<br />
-1.123·10-4<br />
6.756·10-6<br />
-3.912·10-4<br />
-2.96·10-4<br />
0 0<br />
Rysunek przemieszczeń <strong>kratownicy</strong> pozwala kontrolować poprawność otrzymanych wyników<br />
skala 1000<br />
Dx e Ex e skala<br />
u 2 Wpe 1<br />
Dy e Ey e skala<br />
u 2 Wpe<br />
u 2 Wke 1<br />
u 2 Wke
4<br />
Ey 1<br />
Ey 2<br />
Ey 3<br />
Ey 4<br />
3<br />
Ey 5<br />
Ey 6<br />
Ey 7<br />
2<br />
Dy 1<br />
Dy 2<br />
Dy 3<br />
Dy 4<br />
1<br />
Dy 5<br />
Dy 6<br />
Dy 7<br />
1 0 1 2 3 4 5 6 7 8 9 10 11<br />
Ex 1 Ex 2 Ex 3 Ex 4 Ex 5 Ex 6 Ex 7 Dx 1 Dx 2 Dx 3 Dx 4 Dx 5 Dx 6 Dx 7<br />
1
Obliczenie reakcji podpór<br />
r K u p<br />
r T 1 2 3 4 5 6 7 8 9 10<br />
1 3.441 6.18 0 0 0 0 0 1.776·10-15<br />
4.25·10-4<br />
3.735<br />
Obliczenie sił wewnętrznych<br />
E A Npe<br />
N e<br />
L e<br />
2<br />
u 2 Wke 1 u 2 Wp e 1 Lx e u 2 Wke<br />
u 2 Wpe<br />
Ly e<br />
1<br />
3<br />
1<br />
2<br />
-1.966<br />
-2.148<br />
2<br />
N<br />
3<br />
4<br />
-4.176<br />
-1.868<br />
1<br />
5<br />
6<br />
1.868<br />
1.688<br />
0<br />
7<br />
-3.58<br />
N e<br />
1<br />
2<br />
3<br />
4<br />
5<br />
0 1 2 3 4 5 6 7 8<br />
e