automatizácia a riadenie v teórii a praxi artep 2013 viacnásobné ...
automatizácia a riadenie v teórii a praxi artep 2013 viacnásobné ...
automatizácia a riadenie v teórii a praxi artep 2013 viacnásobné ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
AUTOMATIZÁCIA A RIADENIE V TEÓRII A PRAXI<br />
ARTEP <strong>2013</strong><br />
WORKSHOP ODBORNÍKOV Z UNIVERZÍT, VYSOKÝCH ŠKÔL A PRAXE<br />
20. 2. – 22. 2. <strong>2013</strong><br />
STARÁ LESNÁ, SR<br />
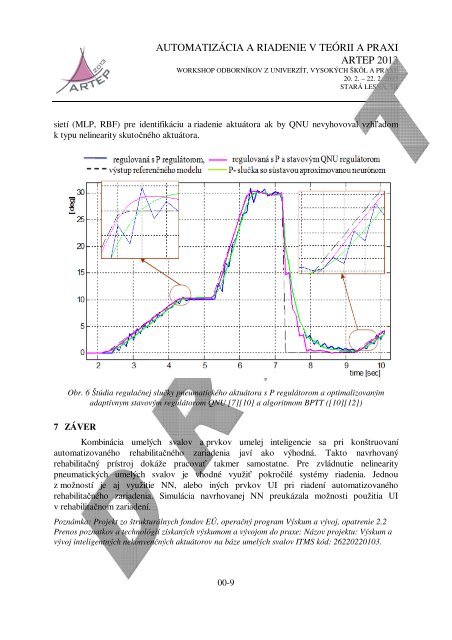
sietí (MLP, RBF) pre identifikáciu a <strong>riadenie</strong> aktuátora ak by QNU nevyhovoval vzhľadom<br />
k typu nelinearity skutočného aktuátora.<br />
Obr. 6 Štúdia regulačnej slučky pneumatického aktuátora s P regulátorom a optimalizovaným<br />
adaptívnym stavovým regulátorom QNU [7][10] a algoritmom BPTT ([10][12])<br />
7 ZÁVER<br />
Kombinácia umelých svalov a prvkov umelej inteligencie sa pri konštruovaní<br />
automatizovaného rehabilitačného zariadenia javí ako výhodná. Takto navrhovaný<br />
rehabilitačný prístroj dokáže pracovať takmer samostatne. Pre zvládnutie nelinearity<br />
pneumatických umelých svalov je vhodné využiť pokročilé systémy riadenia. Jednou<br />
z možností je aj využitie NN, alebo iných prvkov UI pri riadení automatizovaného<br />
rehabilitačného zariadenia. Simulácia navrhovanej NN preukázala možnosti použitia UI<br />
v rehabilitačnom zariadení.<br />
Poznámka: Projekt zo štrukturálnych fondov EÚ, operačný program Výskum a vývoj, opatrenie 2.2<br />
Prenos poznatkov a technológií získaných výskumom a vývojom do praxe: Názov projektu: Výskum a<br />
vývoj inteligentných nekonvenčných aktuátorov na báze umelých svalov ITMS kód: 26220220103.<br />
00-9