Mathcad - krata3t
Mathcad - krata3t
Mathcad - krata3t

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
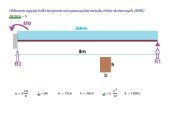
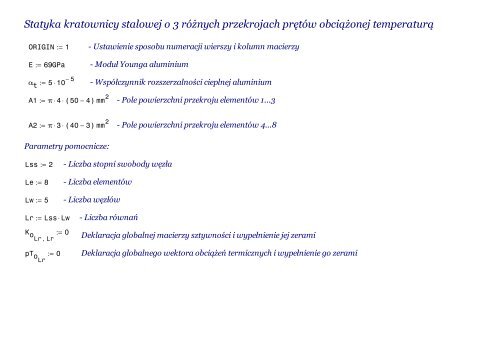
Statyka kratownicy stalowej o 3 różnych przekrojach prętów obciążonej temperaturą<br />
ORIGIN := 1 - Ustawienie sposobu numeracji wierszy i kolumn macierzy<br />
E<br />
:= 69GPa - Moduł Younga aluminium<br />
α t := 5 ⋅ 10 − 5 - Współczynnik rozszerzalności cieplnej aluminium<br />
A1 := π ⋅ 4 ⋅ ( 50 − 4)<br />
mm 2 - Pole powierzchni przekroju elementów 1...3<br />
A2 := π ⋅ 3 ⋅ ( 40 − 3)<br />
mm 2 - Pole powierzchni przekroju elementów 4...8<br />
Parametry pomocnicze:<br />
Lss := 2 - Liczba stopni swobody węzła<br />
Le := 8 - Liczba elementów<br />
Lw := 5 - Liczba węzłów<br />
Lr<br />
:= Lss ⋅ Lw - Liczba równań<br />
K oLr := 0<br />
, Lr<br />
Deklaracja globalnej macierzy sztywności i wypełnienie jej zerami<br />
pT oLr := 0 Deklaracja globalnego wektora obciążeń termicznych i wypełnienie go zerami
Funkcja LBM - Lokuj Blok Macierzy, używana przy agregacji macierzy sztywności i wektora obciążeń termicznych<br />
LBM ( A , B , w , k)<br />
:=<br />
for i ∈ 0 .. rows( B) − 1<br />
for j ∈ 0 .. cols( B) − 1<br />
A w+ i , k+<br />
j ← B 1+ i , 1+<br />
j<br />
A
Współrzędne węzłów kratownicy<br />
X<br />
0<br />
3<br />
5<br />
7<br />
10<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
m<br />
:= Y<br />
0<br />
2<br />
0<br />
3<br />
0<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
m<br />
:=<br />
Numery węzłów początkowych (Wp) i<br />
końcowych (Wk) elementów<br />
Przyrost temperatury elementów<br />
Przekroje elementów<br />
Wp<br />
1<br />
2<br />
4<br />
1<br />
3<br />
2<br />
2<br />
3<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
:= Wk<br />
2<br />
4<br />
5<br />
3<br />
5<br />
3<br />
5<br />
4<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
:=<br />
T<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
50<br />
0<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
:= A<br />
A1<br />
A1<br />
A1<br />
A2<br />
A2<br />
A2<br />
A2<br />
A2<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
:=
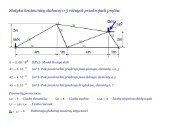
e := 1 .. Le Pętla po wszystkich elementach kratownicy<br />
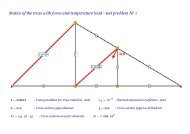
Rysunek elementów kratownicy pozwala kontrolować poprawność wprowadzonych danych<br />
⎡<br />
X Y<br />
( Wpe )<br />
Ex<br />
⎢<br />
( Wpe )<br />
e := Ey<br />
⎢<br />
e :=<br />
⎢ ⎥ Ex, Ey - współrzędne węzłów elementów kratownicy<br />
X ⎢Y Wke<br />
Wke<br />
Ey 1<br />
⎣<br />
( )<br />
⎤ ⎥<br />
⎥<br />
⎦<br />
4<br />
⎡<br />
⎣<br />
( )<br />
⎤<br />
⎥<br />
⎦<br />
Ey 2<br />
3<br />
Ey 3<br />
Ey 4<br />
2<br />
Ey 5<br />
Ey 6<br />
Ey 7<br />
1<br />
− 1 0 1 2 3 4 5 6 7 8 9 10 11<br />
Ey 8<br />
− 1<br />
Ex 1 , Ex 2 , Ex 3 , Ex 4 , Ex 5 , Ex 6 , Ex 7 , Ex 8
Macierze sztywności elementów kratownicy<br />
Lx e := X Wke<br />
− X Wpe<br />
Ly e := Y Wke<br />
− Y Wpe<br />
L e := Lx e<br />
( )<br />
( )<br />
( )<br />
( )<br />
( ) 2 + ( Ly e ) 2<br />
1<br />
1<br />
1<br />
1<br />
2<br />
3.000<br />
4.000<br />
1<br />
2<br />
2.000<br />
1.000<br />
1<br />
2<br />
3.606<br />
4.123<br />
Lx<br />
3<br />
4<br />
3.000<br />
= m<br />
Ly<br />
5.000<br />
5 5.000<br />
6 2.000<br />
3<br />
4<br />
-3.000<br />
= m<br />
L<br />
0.000<br />
5 0.000<br />
6 -2.000<br />
=<br />
3<br />
4<br />
5<br />
6<br />
4.243<br />
5.000<br />
5.000<br />
2.828<br />
m<br />
J e :=<br />
⎡<br />
( ) 2<br />
E ⋅ A e Lx<br />
⎢ e<br />
( L e ) 3 ⋅<br />
⎢<br />
Lx e ⋅ Ly e<br />
⎣<br />
Lx e ⋅ Ly e<br />
( Ly e ) 2<br />
⎤<br />
⎥<br />
⎥<br />
⎦<br />
7<br />
7.000<br />
7<br />
-2.000<br />
7<br />
7.280<br />
8<br />
2.000<br />
8<br />
3.000<br />
8<br />
3.606<br />
Mimo, że nie jest to potrzebne w dalczych obliczeniach, można pokazać bloki J macierzy sztywności wszystkich elementów<br />
⎛<br />
7658.5 5105.7<br />
9104.7 2276.2 kN<br />
4700.6<br />
J 1 = ⎜<br />
⋅<br />
J 2 = ⎜<br />
⎟ ⋅<br />
J 3 = ⎜<br />
5105.7 3403.8 m<br />
2276.2 569.0 m<br />
−4700.6<br />
⎝<br />
⎞ ⎟⎠<br />
kN<br />
⎛<br />
⎝<br />
⎞<br />
⎠<br />
⎛<br />
⎝<br />
−4700.6<br />
4700.6<br />
⎞<br />
⎟<br />
⎠<br />
⋅<br />
kN<br />
m<br />
⎛<br />
4812.3 0.0<br />
4812.3 0.0 kN<br />
4253.5<br />
J 4 = ⎜<br />
⋅<br />
J 5 = ⎜<br />
⎟ ⋅<br />
J 6 = ⎜<br />
0.0 0.0 m<br />
0.0 0.0 m<br />
−4253.5<br />
⎝<br />
⎞ ⎟⎠<br />
kN<br />
⎛<br />
⎝<br />
⎞<br />
⎠<br />
⎛<br />
⎝<br />
−4253.5<br />
4253.5<br />
⎞<br />
⎟<br />
⎠<br />
⋅<br />
kN<br />
m<br />
⎛<br />
3055.7 −873.0<br />
2053.4<br />
J 7 = ⎜<br />
⋅<br />
J 8 = ⎜<br />
−873.0 249.4 m<br />
3080.1<br />
⎝<br />
⎞ ⎟⎠<br />
kN<br />
⎛<br />
⎝<br />
3080.1<br />
4620.1<br />
⎞<br />
⎟<br />
⎠<br />
⋅<br />
kN<br />
m
Agregacja, czyli dodawanie bloków macierzy sztywności elementów do macierzy globalnej<br />
n e := Lss⋅ Wp e − 1 k e Lss⋅ Wk e − 1<br />
:=
Globalny wektor sił węzłowych<br />
Rzutowanie siły w węźle 6 na osie globalnego układu współrzędnych<br />
Fx 4 := −6kN⋅ sin ( 32deg)<br />
= −3.180⋅<br />
kN<br />
p<br />
:=<br />
⎛<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎜<br />
⎝<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
Fx 4<br />
Fy 4<br />
0<br />
0<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
p =<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
9<br />
10<br />
1<br />
0.000<br />
0.000<br />
0.000<br />
0.000<br />
0.000<br />
0.000<br />
-3.180<br />
-5.088<br />
0.000<br />
0.000<br />
⋅ kN<br />
Fy 4 := −6kN⋅ cos ( 32deg)<br />
= −5.088⋅<br />
kN
- siły węzłowe wywołane temperaturą w elemencie "e"<br />
t e :=<br />
α t ⋅ T e<br />
⋅<br />
E ⋅ A e<br />
L e<br />
⎛<br />
⎜<br />
⎜<br />
⎝<br />
Lx e<br />
Ly e<br />
⎞<br />
⎟<br />
⎟<br />
⎠<br />
Agregacja wektora obciążeń termicznych pT (metodą podobną do stosowanej w agregacji macierzy sztywności)<br />
pT :=<br />
LBM ( pT o , t e , n e , 1 ) − LBM pT o , t e , k e ,<br />
∑ ( ( 1)<br />
)<br />
e<br />
pT T =<br />
1 2 3 4 5 6 7 8 9 10<br />
1 0.000 0.000 57.839 -16.525 0.000 0.000 0.000 0.000 -57.839 16.525<br />
⋅ kN
Kopiowanie Macierzy K i wektora p przed modyfikacją uwzględniającą warunki brzegowe<br />
K o := K p o := p − pT<br />
Uwzględnienie warunków brzegowych<br />
Lwb := 5 - liczba warunków brzegowych<br />
s<br />
⎛<br />
⎜<br />
1<br />
⎜<br />
2<br />
⎟<br />
:= - globalne numery przemieszczeń węzłów<br />
⎜ 9 blokowanych na podporach<br />
⎜<br />
⎝<br />
10<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
i := 1 .. Lr j := 1 .. rows( s)<br />
K osj<br />
, i<br />
K oi<br />
, sj<br />
:= 0 zerowanie wierszy<br />
:= 0 zerowanie kolumn<br />
K osj<br />
, s j<br />
:=<br />
1 kN<br />
m<br />
wstawianie jedności na przekątną<br />
macierzy sztywności<br />
p o<br />
( sj )<br />
:= 0 zerowanie wartości w wektorze "prawej strony"
1 2 3 4 5 6 7 8 9 10<br />
1<br />
2<br />
3<br />
4<br />
K o =<br />
5<br />
1.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0<br />
0.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0<br />
0.0 0.0 24072.3 2255.3 -4253.5 4253.5 -9104.7 -2276.2 0.0 0.0<br />
0.0 0.0 2255.3 8475.8 4253.5 -4253.5 -2276.2 -569.0 0.0 0.0<br />
0.0 0.0 -4253.5 4253.5 15931.5 -1173.5 -2053.4 -3080.1 0.0 0.0<br />
6<br />
7<br />
8<br />
9<br />
10<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
4253.5<br />
-9104.7<br />
-2276.2<br />
0.0<br />
0.0<br />
-4253.5<br />
-2276.2<br />
-569.0<br />
0.0<br />
0.0<br />
-1173.5<br />
-2053.4<br />
-3080.1<br />
0.0<br />
0.0<br />
8873.6<br />
-3080.1<br />
-4620.1<br />
0.0<br />
0.0<br />
-3080.1<br />
15858.6<br />
655.6<br />
0.0<br />
0.0<br />
-4620.1<br />
655.6<br />
9889.7<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
1.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
0.0<br />
1.0<br />
⋅<br />
kN<br />
m<br />
K o ⋅ 1<br />
m<br />
kN<br />
= 7.548 × 10 23 - wyznacznik macierzy K o jest zawsze większy od zera, |K o |> 0<br />
T<br />
p<br />
1 2 3 4 5 6 7 8 9 10<br />
o =<br />
1 0.000 0.000 -57.839 16.525 0.000 0.000 -3.180 -5.088 0.000 0.000<br />
⋅ kN
( )<br />
Rozwiązanie układu równań: u := lsolve K o , p o<br />
u - wektor przemieszczeń węzłowych<br />
u T =<br />
1 2 3 4 5 6 7 8 9 10<br />
1 0.0000 0.0000 -4.9655 6.7195 -2.9459 4.7396 -1.5530 0.1290 0.0000 0.0000<br />
⋅ mm<br />
Rysunek przemieszczeń kratownicy pozwala kontrolować poprawność otrzymanych wyników<br />
skala := 100<br />
⎡<br />
u<br />
( 2 ⋅ Wpe −1)<br />
Dx e := Ex e + skala⋅<br />
⎢ ⎥<br />
Dy<br />
⎢<br />
e := Ey e + skala⋅<br />
u 2 ⋅ Wke −1<br />
⎣<br />
( )<br />
⎤<br />
⎥<br />
⎦<br />
⎡<br />
⎢<br />
⎢<br />
⎣<br />
u<br />
( 2 ⋅ Wpe )<br />
u<br />
( 2 ⋅ Wke )<br />
⎤<br />
⎥<br />
⎥<br />
⎦
4<br />
Ey 1<br />
Ey 2<br />
Ey 3<br />
Ey 4<br />
3<br />
Ey 5<br />
Ey 6<br />
Ey 7<br />
Ey 8<br />
2<br />
Dy 1<br />
Dy 2<br />
Dy 3<br />
Dy 4<br />
1<br />
Dy 5<br />
Dy 6<br />
Dy 7<br />
− 1<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Dy 8<br />
− 1<br />
Ex 1 , Ex 2 , Ex 3 , Ex 4 , Ex 5 , Ex 6 , Ex 7 , Ex 8 , Dx 1 , Dx 2 , Dx 3 , Dx 4 , Dx 5 , Dx 6 , Dx 7 , Dx 8
Obliczenie reakcji podpór<br />
r<br />
:=<br />
K ⋅ u<br />
− p + pT<br />
r T =<br />
1 2 3 4 5 6 7 8 9 10 11 12 13 14<br />
1 17.897 2.480 -0.000 -0.000 -0.000 0.000 0.000 -0.000 -14.717 2.608<br />
⋅ kN<br />
Obliczenie sił wewnętrznych<br />
N e :=<br />
E ⋅ A e<br />
( L e ) 2 ⋅ ⎡ u 2 ⋅ Wke<br />
− u<br />
⎣ −1<br />
2 ⋅ Wpe −1<br />
( ) ⋅ Lx e<br />
+ ( u 2 ⋅ Wke<br />
− u 2 ⋅ Wpe ) ⋅ Ly e<br />
⎤<br />
⎦<br />
−<br />
α t ⋅ T e<br />
⋅ E ⋅ A e<br />
30<br />
N =<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
1<br />
-4.471<br />
16.562<br />
11.181<br />
-14.176<br />
14.176<br />
24.058<br />
-38.273<br />
-20.445<br />
⋅ kN<br />
N e<br />
kN<br />
20<br />
10<br />
0<br />
− 10<br />
− 20<br />
− 30<br />
− 40<br />
0 1 2 3 4 5 6 7 8 9<br />
e
Obliczenie naprężeń<br />
σ e :=<br />
( ) ⋅ Lx e<br />
E<br />
( L e ) 2 ⋅ ⎡ u 2 ⋅ Wke<br />
− u<br />
⎣ −1<br />
2 ⋅ Wpe −1<br />
+ ( u 2 ⋅ Wke<br />
− u 2 ⋅ Wpe ) ⋅ Ly e<br />
⎤<br />
⎦<br />
−<br />
α t ⋅ T e<br />
⋅ E<br />
80<br />
1<br />
60<br />
σ =<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8<br />
-7.735<br />
28.652<br />
19.343<br />
-40.653<br />
40.653<br />
68.990<br />
-109.753<br />
-58.630<br />
⋅ MPa<br />
σ e<br />
MPa<br />
40<br />
20<br />
0<br />
− 20<br />
− 40<br />
− 60<br />
− 80<br />
− 100<br />
− 120<br />
0 1 2 3 4 5 6 7 8 9<br />
e