Vejgeometri - Vestergaards Matematik Sider
Vejgeometri - Vestergaards Matematik Sider
Vejgeometri - Vestergaards Matematik Sider

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
© Erik Vestergaard – www.matematiksider.dk 9<br />
<br />
(6) r1() s = r( ϕ()), s s∈I1 (7) 1<br />
<br />
1 r'( t)<br />
r'() s = r'( ϕ()) s ⋅ϕ '() s = r'() t ⋅ = <br />
r'() t r'() t<br />
I (7) har vi anvendt (2). Den viser, at hastighedsvektoren for r1 overalt har længden 1.<br />
Kurven gennemløbes altså med den konstante fart 1! Det er ofte svært i praktiske opgaver<br />
at bestemme den naturlige parameterfremstilling, da det involverer, at man finder<br />
et udtryk for den inverse funktion til kurvelængdefunktionen.<br />
2.4 Tangentdrejning og krumning<br />
2 <br />
Givet en regulær parametriseret C − kurve rt (), t∈I . Lad dens naturlige parameterfremstilling<br />
være 1 . Vi vil for ethvert punkt langs kurven definere to vektorer:<br />
(), r s s I ∈<br />
<br />
1<br />
<br />
t() s = r'(), s n() s = tˆ() s<br />
(8) 1<br />
Vektoren t er altså tangentvektoren, mens den såkaldte normalvektor fås som tværvektoren<br />
til tangentvektoren. Ifølge forrige afsnit har tangentvektoren længden 1, hvoraf<br />
det fremgår, at i ethvert punkt af kurven udgør et ortonormalsystem – dvs.<br />
vektorerne har længde 1 og er indbyrdes ortogonale. Systemet kaldes derfor passende<br />
for det ledsagende koordinatsystem langs kurven. Betegnelserne<br />
<br />
n <br />
<br />
( t(), s n() s )<br />
t og n er almindelige<br />
i litteraturen. Førstnævnte bør ikke forveksles med parameteren t! I det følgende skal vi<br />
studere, hvordan tangentvektoren drejer, når man bevæger sig langs kurven.<br />
<br />
Definition 5<br />
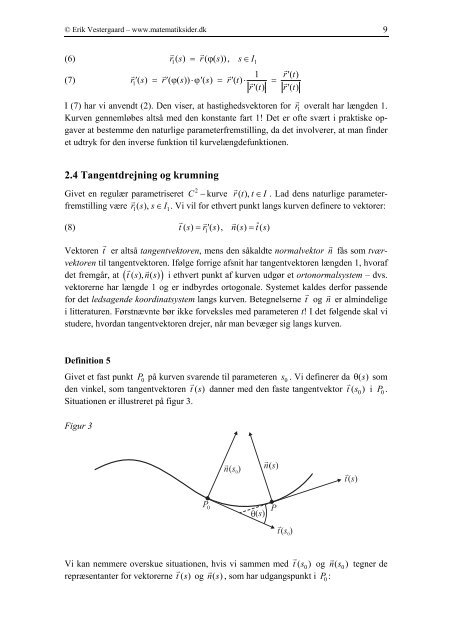
Givet et fast punkt P0 på kurven svarende til parameteren s 0 . Vi definerer da ( ) som<br />
den vinkel, som tangentvektoren<br />
s θ<br />
<br />
t() s danner med den faste tangentvektor <br />
t( s0) i 0 .<br />
Situationen er illustreret på figur 3.<br />
P<br />
Figur 3<br />
<br />
Vi kan nemmere overskue situationen, hvis vi sammen med t( s0)<br />
og ns ( 0)<br />
tegner de<br />
<br />
repræsentanter for vektorerne t() s og ns ( ) , som har udgangspunkt i P0<br />
: