1 Løsningsfase - Offshore Center Danmark
1 Løsningsfase - Offshore Center Danmark
1 Løsningsfase - Offshore Center Danmark

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1 <strong>Løsningsfase</strong><br />
I dette kapitel vil der blive udarbejdet forskellige løsnings forslag der vil leve op til problem<br />
beskrivelsen samt de opstillede kravspecifikationer<br />
1.1 <strong>Løsningsfase</strong> del 1<br />
Løsningfase del 1 blev brugt til at udvikle koncepter til løsninger af problemstillinger<br />
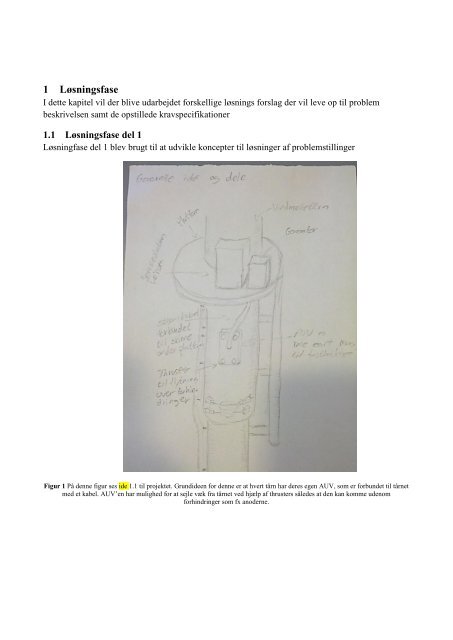
Figur 1 På denne figur ses ide 1.1 til projektet. Grundideen for denne er at hvert tårn har deres egen AUV, som er forbundet til tårnet<br />
med et kabel. AUV’en har mulighed for at sejle væk fra tårnet ved hjælp af thrusters således at den kan komme udenom<br />
forhindringer som fx anoderne.
Figur 2 Denne figur er en detailtegning af AUV’en til ide 1.1. Som det ses på figuren har AUV’en en buet bund, for at maksimere<br />
overfladekontakten med tårnet. Den har en robotarm til at rense områder som er svært tilgængelige. AUV’en bliver holdt fast til<br />
tårnet med magneter og bliver flyttet rundt på tårnet ved hjælp af hjul.<br />
Figur 3 På denne figur ses forslag til formløsninger for AUV’en. Der er brugt runde former for at minimere den modstand der opstår<br />
fra havstrømme. Samtidig er idéen med en krum flade til maksimering af kontakten med tårnet også brugt i disse formløsninger.
Figur 4 Her ses der en tegning af et ide 1.2, som er blevet tegnet i den indledende fase af løsningsprocessen. Der er tegnet en AUV<br />
robot, som har en relativ rundt profil, og dette gør det nemmere at bevæge sig under vand. Derudover har enheden en stor thruster,<br />
som er monteret i enden, og dette er dens fremdriftssystem. Til opdriften har den fået nogle indbyggede ballastanke, som kan ses ude<br />
ved siderne. Af renseredskaber har den nogle børster, som er monteret på nogle fleksible robot arme, og på den måde kan den altså nå<br />
ind på de trængte områder.<br />
Figur 5 Her ses der en tegning af et ide 1.3, som er blevet tegnet i den indledende fase af løsningsprocessen. Dette er også en AUV<br />
robot, som har en kombination af redskaber for en bedre ydelse. Der ses en stor pumpe som er monteret bagerst på enheden, og denne<br />
skal bruges i forbindelse med hydropumpen, som er en højtryksrenser. Derudover har den også en børste som er monteret på en<br />
fleksibel arm. I bunden har den en stor gribe arm, som har til formål at gribe om monopilen ved rensningsprocessen. Til fremdrift og<br />
opdrift har den en justerbar thruster, som altså er bevægelig.
Figur 6 Her ses der en tegning af et ide 1.4, som er blevet tegnet i den indledende fase af løsningsprocessen. Denne AUV robot<br />
anvender to yder ballastanke til opdrift, og yderligere gør de det lettere for robotten at flyde på havoverfladen. Til fremdrift anvender<br />
den en thruster og til rensning bruger den ultralyd.<br />
Figur 7 På billedet ses ide 1.5 set fra oven. De røde cirkler symbolisere fastlåse thruster som kun bruges til at AUV’en kan komme<br />
over overgangen mellem monopile og transition piece og anoderne. Det grønne er en arm som bruges til at rense de steder AUV’en<br />
ellers ikke ville kunne rense, armen kan rotere 360 o og bruges hydroblasting til at fjerne biofouling. AUV’en for sin energi fra<br />
solceller som ligger på AUV’ens overflade. Når en afrensning er færdig vil AUV’en sætte sig på transition piece over vand<br />
overfalden hvor solcellerne vil lade batteriet op.
Figur 8 På billedet ses ide 1.5 fra siden af. Som det ses på billedet har AUV’en en kurveformet bund som gør at den bedre kan<br />
tilpasse sig fundamentes form, det vil betyde at AUV’ens renseflade kan komme tætter på. De brune firkanter symboliserer hjulene<br />
som er med til at holde en fast afstand mellem AUV og fundamentet. AUV’en bliver holdt fast til tårnet ved hjælp af kraftige<br />
magneter, den bevæger sig så på tårnet ved at en motor driver hjulene og den kan derved køre på fundamentet. For at komme fra<br />
tårnet bruges den orange arm som kan skubbe AUV’en fra fundamentet.<br />
Figur 9 På billedet ses ide 1.5 fra bunden af. Her ses renseområde som er det gule, afrensningen foregår ved hyddroblasting, og<br />
AUV’en vil have en indbygget pumpe. Som det også kan ses så er hjulene placeret inde på robotten for at optimere det område der<br />
kan afrenses. Pilen beskriver bevægelses retningen for hjulene, dog vil AUV’en kunne dreje 360 o om sig selv
Figur 10 På billede kan der ses tre monopiles, der er forbundet med en skinne. Det er tænkt, at ved hjælp af en skinne skal AUV’en<br />
transportere sig fra mølle til mølle. Derved kan det undgås at udvikle et navigations system, til at navigere i mellem møllerne.<br />
Figur 11 På billedet ses ide 1.6 som er et børste system, som er monteret foran på AUV’en. Tanken var at den skulle fungere som<br />
børsterne i en vaskehal til biler. Med sådan nogle børster kan AUV’en hurtigt afrense store områder, men der vil blive problemer<br />
med at komme ind under boatlanding, eller andre steder hvor monopiles.
Figur 12 På billedet ses ide 1.7 som viser hvordan en docking station ved hver monopile kan bruges til at lade AUV'en mens der<br />
afrenser. Det vigtigste med denne ide er at der sidder en docking station tæt ved hver mølle, som AUV’en sejler hen til. Den vil<br />
kunne få ladet dens batterier op imens den afrenser. I selve docking station vil der kunne være forbindelse ind til land, eller<br />
kompresser hvis AUV’en skal bruge tryk til at afrense med.<br />
Figur 13 På billedet ses ide 1.8 som er en AUV der anuhugger til tårnet ved hjælp af elektromagneter og afrenser ved hjælp af<br />
ultralyd.<br />
Ud fra de overstående idéer, er der blevet kigget på de koncepter som de består af, og opdelt dem i<br />
gode og dårlige aspekter ved dem:<br />
Gode Dårlige<br />
� Elektro magnet (Kabel) – justerbar,<br />
nemmere frigørelse fra tårn<br />
� Docking station ved hvert tårn –<br />
mulig at få strøm til AUV<br />
� Børster til store flader<br />
� Elektro mag. (Batteri) – stort<br />
effektbehov<br />
� Skinner på havbunden – korrosion,<br />
scouring<br />
� Børster til trængte områder og
� Cavitation – sikkert, effektiv, afrense<br />
huller<br />
� Ultralyd – god til forebygning<br />
� Robotarme – mulig at komme til<br />
snævre områder, fleksibel<br />
� Hydroblast – effektiv<br />
� Justerbar thruster – maksimere<br />
bevægelsesfriheden<br />
� Rare earth mag (Bat), kraftige<br />
� Solceller, nem tilgang til strøm,<br />
behøver ikke kabel<br />
� Faste thruster – simpelt<br />
� En per mølle – hyppigere rense<br />
frekvens<br />
� Krum renseflade – maksimere<br />
renseområdet, minimere afstanden<br />
� Pumpe på tårn – minimere AUV<br />
vægt og størrelse<br />
� Hydrodynamisk profil – minimere<br />
effektbehovet ved sejlads<br />
transport<br />
� Cavitation – kræver pumper<br />
� Ultralyd – Langsom afrensning, skal<br />
køre 24/7<br />
� Ydre balasttanke – fylder meget<br />
� Hydroblast – højttryk, pumpe, farligt,<br />
spidsen skal være tæt på overfladen<br />
� Solceller – lav afrensnings frekvens<br />
� Justerbar thruster – fylder mere end<br />
fastmonteret, kræver mere strøm,<br />
mere mekanisk<br />
� Rare earth mag (Kabel), kraftige,<br />
ikke justerbare<br />
� Solceller (Kort afrensnigns frekvens),<br />
lader ikke under vandet og overskyet<br />
vejr, kræver stor overflade<br />
� Faste thruster – mindre<br />
manøvredygtig<br />
� En per mølle – dyr<br />
� Pumpe på tårn – mere<br />
vedligeholdelse, dyr, overførelse fra<br />
pumpe til AUV<br />
� Hydrodynamisk profil – mindre<br />
plads, mere kompleks struktur<br />
1.2 <strong>Løsningsfase</strong> del 2<br />
I løsningsfase del 2 arbejdes der videre med nogle af de gode koncepter fra løsningsfase del 1 og<br />
tabel der vil blive set bort fra at arbejde videre med Ultralyd fordi det kræver at det køre 24/7 ved<br />
hvert fundament, børster ses der også bort fra da de har en ulempe ved mere komplekse strukturere<br />
og trængte områder. Der kommer også yderlige ideer til hvordan det hydrodynamiske profil kan<br />
udformes.
Figur 14 På figuren ses ide 2.1. Grundtanken var at få så runde former som muligt for at minimere modstanden i vandet. AUV’en<br />
bruger batteri til sejlads mellem vindmøllerne, og under rensning kobler AUV’en sig på et kabel ved en docking station på<br />
vindmøllen hvorfra den lader batteriet og får strøm til systemet. De fire huller at ud- og indgangshuller til thrusterne. Til flytning<br />
rundt på fundamentet er der monteret kuglehjul under AUV’en og så bruger thrusterne til at flytte sig med. Thrusterne der bruges er<br />
rim driven thruster.<br />
Figur 15 På billedet ses løsning 2.1 set fra bunden af. AUV’en får energi fra et kabel. Afrensningen foregår ved hydroblasting fra de<br />
guleområder, dyserne er vinklet ud fra robotten og vil derved kunne rense et mindre stykke ud fra AUV’ens ”krop”. AUV’en<br />
fasholdes til fundamentet ved hjælp af elektromagneter som vises med grå firkanter, den bevæger sig på tårnet ved hjælp af motor<br />
drevet hjul som symboliseres af brune firkanter. Den overkommer overgangsstykkerne ved at slukke elektromagneterne og bruge<br />
sine 45 o vinklet thrusteres.
Figur 16 På billedet ses løsning 2.1 set fra siden AUV’en har en krum overflade oven på for at lettere lede havstrømmen omkring<br />
sig, yderlige har den også en krum bund som gør at den bedre tilpasser sig fundaments form. AUV’en er udstyret med en robotarm<br />
for at hjælpe med afrensningen på trængte steder, når den ikke bruges skal den kunne trækkes tæt ind til AUV’en så den ikke stikker<br />
ud og øger modstanden fra hav strømmen.<br />
Figur 17 På billedet ses løsning 2.1 ud fra, her ses det hvordan robotten er tilkoblet energikilden. Ideen er at der sammen med<br />
kablerne, til at lede strømmen fra vindmøllerne til transformerstationen, ligger et mindre kable til at føre strøm ud til en docking som<br />
er placeret ved hver mølle. Docking stationen føre strøm til AUV’en under afrensningsprocessen, og lader samtidig et batteri op,<br />
batteriet gør at AUV’en kan bevæge sig mellem møllerne
Endelige løsningsdel<br />
I den endelige løsning er der gennem diskussioner af de forrige ideer, fremkommet en endelige ide,<br />
som skal konstrueres med:<br />
� Elektromagneter til at holde AUV’en mod tårnet. Ved disse magneter kan AUV’en let slippe<br />
fundamentet.<br />
� AUV’en udstyres med 4 hjul som gør at den kan køre op og ned af fundamentet, hjulene<br />
sidder inden for AUV’ens ramme.<br />
� En docking station som sidder ved vindmøllens platform for at undgå at den bliver udsat for<br />
biofouling. Docking stationen kobler et kabel til AUV’en under rensnings processen,<br />
samtidigt bliver et batteri på AUV’en ladt op.<br />
� AUV’en bruger et batteri under transporten mellem vindmøllerne, så den ikke skal trække et<br />
kabel efter sig.<br />
� Der vil til frem driften i vandet blive brugt fast låste thrusters, thrusterne bliver også brugt til<br />
at styrer dybden.<br />
� Til afrensning bruges skal der bruges cavitation, med dyser vinklet på ca. 45 o . der vil være<br />
flere dyser omkring på AUV’en som skal kunne aktiveres separat, dyse hoved skal monteres<br />
på en arm eller en vifte der gør at den kan flyttes fra side til side for at få et større<br />
afrensnings område.<br />
� Pumpen til cavitations anlægget skal være bygget på AUV’en<br />
� Neutral opdrift så der ikke skal bruges for meget energi på at AUV’en kan dykke eller stige<br />
� Nød GPS, et system der udløser en GPS bøje hvis strømmen svigter så AUV’en er let at<br />
finde.