Bau eines selbstständigen Hovercrafts - Landrat-Lucas Gymnasium
Bau eines selbstständigen Hovercrafts - Landrat-Lucas Gymnasium
Bau eines selbstständigen Hovercrafts - Landrat-Lucas Gymnasium

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
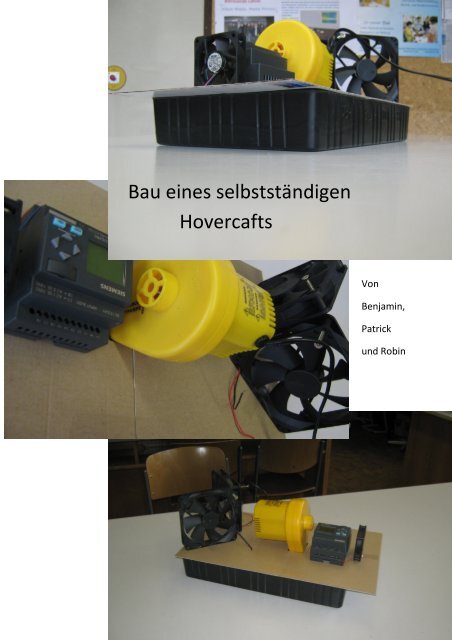
<strong>Bau</strong> <strong>eines</strong> <strong>selbstständigen</strong><br />
Hovercafts<br />
Von<br />
Benjamin,<br />
Patrick<br />
und Robin<br />
1
Gliederung Seite<br />
1. Einleitung 3<br />
2. <strong>Bau</strong> des <strong>Hovercrafts</strong> 4<br />
2.1 Theoretische Betrachtungen 4<br />
2.2 Schlussfolgerungen aus den 6<br />
theoretischen Betrachtungen<br />
2.3 Beschaffung der <strong>Bau</strong>materialien 7<br />
2.4 Konstruktion 9<br />
3. Programmierung und Optimierung der Steuerung 12<br />
3.1 Grundentwurf der ersten LOGO!-Schaltung 13<br />
3.2 Vereinfachungen mit Hilfe der booleschen Algebra 14<br />
4. Zusammenfassung und Ausblick 14<br />
2
1. Einleitung<br />
Im Zuge unserer Projektarbeit im Technikunterricht der Stufe 13, haben wir uns<br />
dazu entschieden ein „selbstständiges“ Hovercraft zu bauen. Es soll sich ohne<br />
fremde Eingriffe auf eine Lichtquelle zubewegen und dann in einem<br />
unbeschränkten Zeitraum in deren Nähe weiterfahren. Dazu ist eine<br />
automatisierte Steuerung notwendig, die wir mit „Siemens LOGO!“ realisieren<br />
werden.<br />
Wir stehen bei unserer Projektarbeit also zwei großen Herausforderungen<br />
gegenüber: Zunächst muss ein möglichst einfaches und robustes Hovercraft<br />
gebaut werden, welches aufgrund unserer beschränkten finanziellen Mittel<br />
möglichst nur aus einfach und kostengünstig zu beschaffenden Materialien<br />
bestehen soll.<br />
Die nächste große Herausforderung ist die Programmierung der Steuerung mit<br />
„Siemens LOGO!“. Diese ist nicht einfach zu realisieren, da das Hovercraft<br />
nahezu reibungsfrei über den Boden gleitet und deshalb auch beim Abstellen<br />
des Antriebs – nicht jedoch des Luftkissengebläses – gemäß dem<br />
Trägheitsprinzip in die vorherige Bewegungsrichtung weiterfährt. Die<br />
Geschwindigkeit automatisch zu messen und damit die Steuerung zu<br />
vereinfachen, ist für uns keine Option, da ein dafür notwendiger Sensor<br />
unseren finanziellen Rahmen sprengen würde.<br />
Unser vorrangiges Ziel ist es, ein funktionierendes Hovercraft zu bauen, dessen<br />
Antrieb über „Siemens LOGO!“ angesteuert werden kann. Dadurch hätten wir<br />
eine Basis für weitere Tests, mit denen die Steuerung stetig optimiert werden<br />
könnte.<br />
3
2.<strong>Bau</strong> des <strong>Hovercrafts</strong><br />
2.1 Theoretische Betrachtungen<br />
Ein Hovercraft ist ein Fahrzeug, das<br />
auf einem durch Überdruck<br />
erzeugten Luftkissen schwebt.<br />
Dieses Grundkonzept ist im<br />
Vergleich zu beispielsweise einem<br />
Fahrzeug mit Rädern relativ<br />
komplex, weshalb einige<br />
theoretische Überlegungen zur<br />
Auslegung unseres Fahrzeugs<br />
gemacht werden müssen.<br />
Bedeutung der folgenden physikalischen Größen:<br />
A: Grundfläche<br />
U: Umfang der Grundfläche<br />
m: Masse des <strong>Hovercrafts</strong><br />
g: Erdbeschleunigung (9,81 m/s²)<br />
v: Einströmgeschwindigkeit der Luft<br />
v‘: Ausströmgeschwindigkeit der Luft<br />
s: Abstand von Hovercraft und Boden<br />
p: Umgebungsdruck (1,013×10 5 N/m²)<br />
ρ: Luftdichte der Umgebung (1,204 kg/m³, proportional zu p)<br />
p‘: Druck im Luftkissen<br />
ρ‘: Luftdichte im Luftkissen<br />
4
Zunächst soll das Luftkissen schweben. Es muss also ein Kräftegleichgewicht<br />
zwischen der Erdanziehung und dem „Auftrieb“ herrschen. So lässt sich der<br />
nötige Druck im Luftkissen (p‘) berechnen:<br />
∗ = − ∗ , daraus folgt:<br />
= ∗<br />
<br />
+ <br />
Als nächstes ist die notwendige Ausströmgeschwindigkeit der Luft zu<br />
bestimmen. Dies geschieht mit Hilfe der Bernoulli-Gleichung. Eine<br />
umfangreiche Betrachtung mit Hilfe der Strömungslehre ist aufgrund der<br />
Trivialität unseres Falls nicht notwendig.<br />
<br />
<br />
+ <br />
<br />
<br />
= + , wobei = 0 ≈ <br />
<br />
Es folgt: = <br />
∗ − <br />
Nachdem p‘ und v‘ nun bekannt sind, muss nur noch der notwendige<br />
Luftmassenstrom berechnet werden.<br />
= , wobei ≈ , = ∗ ′ = ∗ ∗ ′<br />
Also folgt:<br />
= ∗ ∗ ′<br />
Nun lässt sich die notwendige effektive Leistung des Luftkissengebläses<br />
berechnen:<br />
= ∆ ∗ , dabei gilt ∆ = − = <br />
Durch einsetzen alle vorher bestimmten Größen folgt nun:<br />
= ∗ ∗ <br />
<br />
∗ <br />
³<br />
5
Abgesehen von s sind alle nun noch vorkommenden Größen entweder<br />
konstant, oder bei der Konstruktion veränderbar. Nach einigen Recherchen<br />
haben wir außerdem herausgefunden, dass sich auf Grund von<br />
Erfahrungswerten der Ansatz = 0,004 ∗ verwenden lässt. Letztendlich<br />
lautet also die Formel für die von uns benötigte effektive Leistung des<br />
Luftkissengebläses:<br />
= 0,004 ∗ ² ∗ <br />
∗<br />
³<br />
2.2 Schlussfolgerungen aus den theoretischen Betrachtungen<br />
Die zuvor geschilderte Betrachtung erscheint möglicherweise zunächst<br />
übertrieben, sie war jedoch für uns sehr wichtig und ersparte uns viele<br />
Fehlversuche. Um genauer zu sein, mussten wir nach den gerade<br />
beschriebenen Überlegungen unsere komplette Planung umstellen.<br />
Zunächst hatten wir vor, als Luftkissengebläse ein oder zwei Computerlüfter zu<br />
verwenden. Diese haben jedoch nur eine Leistung von wenigen Watt, was – wie<br />
beim Einsetzen von realistischen Werten in unsere Formel auffällt – nicht<br />
ausreicht. Vor allem fiel uns jedoch auf, dass der benötigte Druck im Luftkissen<br />
(p‘) sehr groß ist. Auch stärkere Lüfter stellten also für uns keine Option dar, da<br />
diese immer auf einen möglichst großen Volumenstrom bei möglichst kleiner<br />
Geräuschentwicklung, also möglichst geringem Druck, ausgerichtet sind. Dies<br />
macht sie für unsere Zwecke unbrauchbar.<br />
6
2.3 Beschaffung der <strong>Bau</strong>materialien<br />
Nachdem wir nun wussten, welche Anforderungen unser Luftkissengebläse<br />
erfüllen muss, war der nächste Schritt die Beschaffung <strong>eines</strong> geeigneten<br />
Gebläses. Dieses musste, wie schon erwähnt, eine relativ hohe Leistung haben<br />
und vor allem einen hohen Druck aufbauen.<br />
Eine erste Idee für ein solches Gebläse war ein Haartrockner, der auf die<br />
Kaltstufe eingestellt wird. Ein Vorteil dieser Idee war, dass es auch Camping-<br />
Haartrockner gibt, die mit 12V arbeiten. Dies ist für uns sehr wichtig, da ein<br />
solcher dann mit Akkus betrieben werden könnte und das Hovercraft dadurch<br />
nicht zwangsläufig kabelgebunden wäre. Probleme wären jedoch die Größe,<br />
das relativ hohe Gewicht, die für uns unpassende Form <strong>eines</strong> solchen<br />
Haartrockners und vor allem der relativ hohe Anschaffungspreis.<br />
Unsere nächste Idee war die Benutzung <strong>eines</strong> Gebläses, mit dem<br />
normalerweise Luftmatratzen und Ähnliches aufgeblasen werden. Diese<br />
Gebläse verfügen über alle Eigenschaften, die wir benötigen. Sogar 12V-<br />
Versionen sind verfügbar. Da wir recht schnell sowohl eine 12V, als auch eine<br />
230V-Version <strong>eines</strong> solchen Gebläses in Robins Keller fanden, entschieden wir<br />
uns dazu, diese Gebläse zu benutzen.<br />
Für den Antrieb in horizontaler Richtung sollen die Computer-Lüfter verwendet<br />
werden, die ursprünglich für das Luftkissengebläse gedacht waren und deshalb<br />
nicht weiter gesucht werden mussten. Da diese Lüfter nach wie vor nur einen<br />
geringen Druck erzeugen, ist ihre Antriebsleistung sehr gering.<br />
Dieser scheinbare Nachteil ist von uns jedoch ausdrücklich gewünscht, da das<br />
Hovercraft so keine hohe Geschwindigkeit erreicht und deshalb das Gleiten<br />
nach Abschalten des Antriebs besser kontrollierbar bleibt. Bei hohen<br />
Geschwindigkeiten wäre vor allem die Wahrscheinlichkeit einer schweren<br />
Beschädigung unseres <strong>Hovercrafts</strong> im Fall einer Kollision sehr viel höher, als bei<br />
einer niedrigen Geschwindigkeit. Da wir beim Testen unserer Steuerung nach<br />
Möglichkeit nicht mehrere <strong>Hovercrafts</strong> „verschleißen“ möchten, ist also eine<br />
niedrige Geschwindigkeit sehr wichtig.<br />
Das letzte zentrale <strong>Bau</strong>teil, das uns nun noch fehlte, war die aufliegende Fläche.<br />
Bei einem normalen Hovercraft ist dies die sogenannte Schürze, welche das<br />
7
Luftkissen möglichst gut zurückhalten, gleichzeitig aber den Boden nicht<br />
berühren soll.<br />
Nach einigen Versuchen, eine solche Schürze herzustellen, mussten wir<br />
feststellen, dass dies mit einem für uns vertretbaren Aufwand – schließlich<br />
sollte das Hovercraft primär als Basis für weitere Tests dienen und könnte bei<br />
diesen beschädigt werden – nicht realisierbar ist. Deshalb entschieden wir uns<br />
dazu, kein Hovercraft im eigentlichen Sinne, sondern ein sogenanntes<br />
Bodeneffektfahrtzeug (wir nennen es trotzdem weiterhin Hovercraft), zu<br />
bauen.<br />
Es ist also nun keine Schürze mehr nötig, die sich dem Untergrund anpasst,<br />
sondern nur eine möglichst steife und absolut ebene Platte. Der Nachteil <strong>eines</strong><br />
solchen Bodeneffektfahrzeugs ist, dass dieses keine größeren<br />
Bodenunebenheiten überwinden kann. Da unser Hovercraft jedoch ohnehin<br />
zunächst nicht für unebenes Gelände gedacht war, ist dieser Nachteil für uns<br />
nicht entscheidend.<br />
Nach dieser Entscheidung testeten wir verschiedene Materialien, wie unter<br />
Anderem Pappkarton oder Holz. Diese waren jedoch entweder nicht steif<br />
genug, zu uneben in ihrer Oberfläche oder hatten ein sehr hohes Eigengewicht.<br />
Zwar wäre das hohe Eigengewicht für uns zu verschmerzen gewesen, da unser<br />
Gebläse auch dafür stark genug gewesen wäre, jedoch wollten wir eine<br />
möglichst hohe Zuladung – sei es auch in Form von größeren Akkus für eine<br />
längere Laufdauer – ermöglichen. Deshalb suchten wir weiter nach einem<br />
geeigneteren Material.<br />
Letztendlich haben wir ein nahezu ideal geformtes Stück Hartplastik gefunden.<br />
Es ist sehr leicht, extrem steif und die aufliegende Fläche ist absolut eben.<br />
8
Zusammenfassend sieht unsere Materialliste wie folgt aus:<br />
- „Plattform“ aus Hartplastik<br />
- Papp-Platten zur Abdeckung der Oberseite<br />
- Siemens LOGO!-<strong>Bau</strong>stein zur Steuerung<br />
- 2 große und ein kleiner Computerlüfter zum Antrieb<br />
- Gebläse um das Luftkissen zu erzeugen<br />
- Mehrere Akkus (zunächst 12V, mehrere kleine sind besser, als ein großer,<br />
da so das Gewicht gleichmäßiger verteilt werden kann)<br />
- Schrauben, Tesa-Film, Klebeband und weitere Kleinteile<br />
Auf die Bestandteile dieser Liste wird im Folgenden weiter eingegangen.<br />
2.4 Konstruktion<br />
Nachdem wir alle benötigten <strong>Bau</strong>materialien beschafft hatten, musste als<br />
nächstes ein vollständiges Hovercraft aus diesen gebaut werden.<br />
Zunächst haben wir dazu oben in unsere Hartplastik-„Plattform“ ein Loch<br />
geschnitten und das Gebläse darin befestigt. Dabei war zum einen darauf zu<br />
Achten, dass der Schwerpunkt des Gebläses möglichst mittig über der<br />
Plattform liegt, damit es nicht zu einem Ungleichgewicht kommt. Zum anderen<br />
musste das Loch möglichst dicht mit dem Gebläse abschließen, damit dort<br />
keine eingeblasene Luft verloren geht.<br />
Der nächste Schritt war, die Plattform mit Pappkarton abzudecken. Dies diente<br />
zum einen optischen Gründen, bot jedoch vor allem eine geeignete Basis für<br />
die Montage der Antriebslüfter und des LOGO!-<strong>Bau</strong>steins. Unter dem<br />
Pappkarton, im Inneren der Plattform und dadurch von außen nicht sichtbar,<br />
werden die Akkus montiert. Diese müssen möglichst gleichmäßig verteilt<br />
werden, damit der Schwerpunkt des <strong>Hovercrafts</strong> in seiner Mitte bleibt. Wäre<br />
dies nicht mehr der Fall, könnte es dazu kommen, dass eine Seite der Plattform<br />
den Boden berührt, wodurch das Hovercraft bewegungsunfähig würde.<br />
9
Bei gleichmäßiger Verteilung sind schwere Gewichte im Inneren der Plattform<br />
jedoch auf Grund der hohen Steifigkeit des Materials kein Problem. In unseren<br />
Tests schwebte das Hovercraft sogar mit einer Zuladung von 4kg ohne<br />
Schwierigkeiten über den Boden.<br />
Nun waren nur noch die Lüfter für den<br />
Antrieb zu installieren, was einige<br />
Überlegungen erforderlich machte:<br />
Wir hatten nur zwei große und einen<br />
kleinen Lüfter, mit denen eine möglichst<br />
einfache und robuste Steuerung<br />
gewährleistet werden sollte, bei der sich<br />
das Hovercraft immer noch in jede Richtung<br />
drehen können muss.<br />
Letztendlich haben wir uns für die<br />
nebenstehende Anordnung der Lüfter<br />
entschieden. Die großen Lüfter dienen,<br />
wenn beide gleichzeitig angeschaltet sind,<br />
als ausreichend starker Antrieb nach vorne<br />
und einzeln (zusammen mit dem kleinen Lüfter in der Front) zum Drehen des<br />
<strong>Hovercrafts</strong>. Der kleine Lüfter wäre nicht zwangsläufig nötig, wird von uns<br />
jedoch trotzdem verwendet, da er den Wendekreis des <strong>Hovercrafts</strong> verringert.<br />
Dies liegt daran, dass sein Schub (bei einer Kurvenfahrt) der nach vorne<br />
drückenden Komponente des Schubes des hinteren Lüfters, entgegenwirkt.<br />
10
Nachdem nun alle Lüfter wie gewünscht montiert sind, müssen sämtliche<br />
Verbraucher richtig verkabelt werden. Wie dies geschehen soll, zeigt die<br />
folgende detailgetreue Schaltskizze.<br />
Der <strong>Bau</strong> unseres <strong>Hovercrafts</strong> ist damit zunächst beendet. Als nächstes muss<br />
nun die Steuerung mittels Siemens LOGO! Programmiert werden.<br />
11
3. Programmierung und Optimierung der Steuerung<br />
Folgende Grafik zeigt die Benennung der relevanten <strong>Bau</strong>teile.<br />
12
3.1 Grundentwurf der ersten LOGO!-Schaltung<br />
Um unsere automatische Steuerung zu programmieren, mussten wir uns<br />
zunächst überlegen, wie das Hovercraft auf verschiedene äußere Einflüsse<br />
reagieren soll.<br />
Wir haben uns dafür entschieden, dass das Hovercraft erst dann einlenken soll,<br />
wenn sich die Lichtquelle neben ihm befindet. Dadurch reagiert es zwar recht<br />
spät auf ein Vorbeifahren an dieser, da es jedoch ohnehin nur in der Nähe der<br />
Lichtquelle fahren und diese nicht erreichen soll, ist dieses Verhalten nicht<br />
unerwünscht.<br />
Der Vorteil dieses späten Reagierens liegt vor allem darin, dass die Lüfter so<br />
nicht häufig kurz, sondern eher seltener über jeweils längere Zeiträume<br />
angesteuert werden. Ein kurzes Ansteuern der Lüfter wäre vermutlich ohnehin<br />
nahezu wirkungslos, da die Lüfter zunächst andrehen müssen. Es käme bei<br />
einer frühen Ansteuerung also vermutlich kaum zu nennenswerten Vorteilen,<br />
während die Lüfter wesentlich stärker abgenutzt würden.<br />
Wenn das Hovercraft keinen Lichtpunkt „wahrnehmen“ kann, soll der Antrieb<br />
abgeschaltet werden. Bei unklaren Situationen, die theoretisch nicht<br />
vorkommen können (z.B. alle LDRs gleichzeitig beleuchtet), soll es sich links<br />
herum drehen, bis wieder ein realistische Signal vorliegt.<br />
Aus diesen Bedingungen folgt folgende Wahrheitstabelle:<br />
LDR 1 LDR 2 LDR 3 LDR 4 Lüfter 1 Lüfter 2 Lüfter 3<br />
1 1 1 1 1 0 1<br />
1 1 1 0 1 0 1<br />
1 1 0 1 0 1 1<br />
1 1 0 0 0 1 1<br />
1 0 1 1 1 1 0<br />
1 0 1 0 1 0 1<br />
1 0 0 1 0 1 1<br />
1 0 0 0 0 1 1<br />
0 1 1 1 1 0 1<br />
0 1 1 0 1 0 1<br />
0 1 0 1 1 0 1<br />
0 1 0 0 1 0 1<br />
0 0 1 1 1 1 0<br />
0 0 1 0 1 0 1<br />
0 0 0 1 1 1 0<br />
0 0 0 0 0 0 0<br />
13
3.2 Vereinfachung mithilfe der booleschen Algebra<br />
Eine Wahrheitstabelle, wie sie in 3.1 aufgestellt wurde, ist nicht ohne großen<br />
Aufwand zu einer Schaltung zu verarbeiten. Sie muss deshalb zunächst<br />
vereinfacht werden, wozu die boolesche Algebra dient. Zu diesem Teil sind wir<br />
aber auf Grund von Zeitmangel noch nicht gekommen. Er folgt möglichst bald.<br />
Die vereinfachte Tabelle lässt sich dann relativ einfach mit „LOGO!Soft<br />
Comfort“ am Computer erstellen und auf den LOGO!-<strong>Bau</strong>stein überspielen.<br />
4. Zusammenfassung und Ausblick<br />
Zum vorläufigen, aber nicht endgültigen, Abschluss unserer Projektarbeit lässt<br />
sich festhalten, dass schon in der Planung und Durchführung <strong>eines</strong> kleinen<br />
Projektes wie diesem, erstaunlich viel Arbeit steckt. Vom Finden der Grundidee<br />
über theoretische Überlegungen und Materialtests ist sehr viel Zeit vergangen,<br />
bis überhaupt ein funktionstüchtiges Testgerät für die eigentliche Steuerung<br />
zur Verfügung stand. Trotzdem hat insbesondere der praktische Teil der Arbeit,<br />
also das testen und verbessern von verschiedenen Ideen sehr viel Spaß<br />
gemacht.<br />
Als nächstes ist das Hovercraft fertig zu „verkabeln“, was jedoch nur wenige<br />
Minuten in Anspruch nehmen wird. Wenn dann außerdem die Schaltung auf<br />
den LOGO!-<strong>Bau</strong>stein übertragen wurde und passende Akkus zur Verfügung<br />
stehen, ist das Hovercraft einsatzbereit und die bisher nicht getestete<br />
Schaltung kann optimiert werden.<br />
14