Einführung eines Betriebshofmanagementsystems für ... - VAB Berlin
Einführung eines Betriebshofmanagementsystems für ... - VAB Berlin
Einführung eines Betriebshofmanagementsystems für ... - VAB Berlin

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Einführung</strong> <strong>eines</strong> <strong>Betriebshofmanagementsystems</strong> <strong>für</strong> BERNMOB<br />
A new depot management system for BERNM<br />
20<br />
SYSTEMLÖSUNGEN/ SYSTEM SOLUTIONS<br />
Hans Peter Schneider. Die Städtischen Verkehrsbetriebe Bern –<br />
BERNMOBIL – haben im Juli 2009 mit der Verkehrsautomatisierung<br />
<strong>Berlin</strong> GmbH (<strong>VAB</strong>) einen Werkvertrag zur Lieferung<br />
und Inbetriebnahme <strong>eines</strong> integrierten <strong>Betriebshofmanagementsystems</strong><br />
abgeschlossen.<br />
Der Vertrag beinhaltet die Realisierung<br />
und Installation <strong>eines</strong><br />
<strong>Betriebshofmanagementsystems</strong><br />
(BMS) <strong>für</strong> alle Betriebshöfe des<br />
Verkehrsunternehmens. Vorangegangen<br />
war eine viermonatige<br />
Phase, in welcher der Funktionsumfang<br />
sowie die Anforderungen<br />
an das BMS in mehreren<br />
mehrtägigen Arbeitsberatungen<br />
diskutiert wurden. Als Ergebnis<br />
der Beratungen wurde einvernehmlich<br />
ein Pflichtenheft erstellt,<br />
welches Grundlage <strong>für</strong> die Realisierung<br />
ist. Die Beratungen fanden<br />
durchweg in einer angenehmen<br />
konstruktiven Atmosphäre<br />
statt. Von Anfang an wurden<br />
möglichst viele Betroffene in die<br />
Diskussion einbezogen, wobei<br />
nicht nur die Anforderungen an<br />
die künftige Software berücksichtigt<br />
wurden, sondern insbeson -<br />
dere auch die Auswirkung auf<br />
bestehende Arbeitsabläufe.<br />
Derzeit betreibt BERNMOBIL vier<br />
Betriebshöfe. Der größte Betriebshof,<br />
gleichzeitig der Hauptsitz<br />
des Unternehmens, befindet<br />
sich zentral gelegen am Eigerplatz.<br />
Dieser Betriebshof besteht<br />
aus einem Unter- und Obergeschoss<br />
<strong>für</strong> Busse sowie einer Abstellhalle<br />
<strong>für</strong> die Trambahnen.<br />
Weitere Betriebshöfe befinden<br />
sich in Burgernziel (Tram) und in<br />
der Freiburgstraße (Bus). Für die<br />
Tram ist ein kompletter Neubau<br />
in der Bolligenstraße geplant,<br />
welcher Mitte 2011 in Betrieb gehen<br />
soll.<br />
Bei der Konzeption des BMS<br />
wurde besonderes Augenmerk<br />
darauf gelegt, das BMS nahtlos in<br />
die vorhandene IT-Landschaft<br />
einzubetten und vorhandene<br />
Softwaresysteme effektiv einzubinden.<br />
So verfügt das Managementsystem<br />
über eine Vielzahl<br />
von Schnittstellen zu anderen<br />
technischen Systemen.<br />
Zu einem modernen BMS gehört<br />
heutzutage selbstverständlich, dass<br />
Aus- und Einfahrten automatisch<br />
registriert werden und dem Einsatzleiter<br />
stets ein Überblick über<br />
die aktuellen Fahrzeugstandorte<br />
auf dem Betriebshof geliefert<br />
wird.<br />
Zur Verfolgung der Fahrzeugbewegungen<br />
der Tram wird das<br />
vorhandene Identifikationssystem<br />
(PSK) genutzt, welches an ausgewählten<br />
Punkten über Oberleitungskontakte<br />
eine Identifikation<br />
der Fahrzeuge ermöglicht. Diese<br />
Variante der Fahrzeugidentifika -<br />
tion ist bei schienengebundenen<br />
Fahrzeugen ausreichend.<br />
Da sich Busse im Gegensatz zur<br />
Tram nicht in fixen Spuren bewegen,<br />
werden an die Busortung<br />
höhere Anforderungen gestellt.<br />
Hier wird ein spezielles Ortungssystem<br />
eingesetzt, das in enger<br />
Zusammenarbeit mit der <strong>VAB</strong><br />
weiterentwickelt wurde.<br />
Dabei handelt es sich um ein<br />
innovatives Funkortungssystem,<br />
welches den freien 2,4-GHz-Bereich<br />
zur Datenkommunikation<br />
nutzt. Es werden Sensoren (so genannten<br />
Anker) eingesetzt, die<br />
erkennen, ob in ihrem Empfangsbereich<br />
Tags vorhanden sind. Jedes<br />
Fahrzeug ist mit einem Tag<br />
ausgerüstet, welcher an das<br />
Bordnetz angeschlossen ist und<br />
somit keine zusätzliche Stromversorgung<br />
benötigt. Die Tags sind<br />
aktiv und melden sich bei den<br />
Sensoren. Die eigentliche Ortung<br />
basiert auf der Messung der Entfernungen<br />
zwischen Tag und<br />
Sensoren anhand der Signal -<br />
laufzeiten.<br />
Eine Ortung bezieht sich immer<br />
auf einen räumlichen Bereich. Der<br />
Betriebshof wird in separate Bereiche<br />
unterteilt, welche manuell<br />
über entsprechende Dialoge in<br />
das Ortungssystem eingepflegt<br />
werden. Je nachdem, welche Anforderungen<br />
an die Genauigkeit<br />
der Ortung in einem konkreten<br />
Bereich gestellt werden, werden<br />
folgende Ortungsarten unterschieden:<br />
Positionsgenaue Ortung:<br />
Hiermit wird ein Fahrzeug einer<br />
konkreten Spur innerhalb des Abstellbereiches<br />
zugeordnet und die<br />
Längsposition (innerhalb dieser<br />
Spur) mit einer Toleranz von maximal<br />
einem Meter bestimmt. Diese<br />
Art der Ortung wird <strong>für</strong> die<br />
Abstellhallen sowie den Werkstattbereich<br />
verwendet und stellt<br />
somit den überwiegenden Teil der<br />
Ortung dar.<br />
Bereichsgenaue Ortung – Anwesenheitserkennung:<br />
Das Ortungssystem stellt lediglich<br />
die Anwesenheit des Tags, und<br />
damit des Fahrzeuges, innerhalb<br />
des definierten Bereiches fest.<br />
Diese Variante wird bei BERN-<br />
MOBIL nicht eingesetzt.<br />
Annäherung – Anwesenheits -<br />
erkennung mit Entfernungsangabe:<br />
Zusätzlich zur Anwesenheitserkennung<br />
wird die Entfernung<br />
<strong>eines</strong> Tags zu einem Anker bestimmt.<br />
Diese Ortungsvariante<br />
wird <strong>für</strong> die Registrierung der<br />
Aus- und Einfahrt und als Auslöser<br />
<strong>für</strong> die automatische Zielermittlung<br />
verwendet.<br />
Die Fahrzeugortung quasi in Echtzeit<br />
ermöglicht es dem BMS, die<br />
Fahrzeuge automatisch auf die<br />
entsprechenden Abstellplätze zu<br />
leiten. Die Ermittlung <strong>eines</strong> geeigneten<br />
Abstellplatzes ist ein komplexer<br />
Algorithmus, bei dem das<br />
BMS diverse Randbedingungen<br />
berücksichtigt. Dabei werden neben<br />
der aktuellen Hofbelegung,<br />
den Zuordnungen von Vorzugssowie<br />
Ausschlusstypen zu Spuren<br />
und den aktuellen Einsatzeinschränkungen<br />
des Fahrzeuges<br />
auch bereits vorgenommene Planungen<br />
hochgerechnet sowie die<br />
Disposition und Zielzuweisungen<br />
der anderen Fahrzeuge berücksichtigt.<br />
Ein erster Meilenstein war die<br />
Werkabnahme Ende Dezember<br />
2009 im Hause der Verkehrsautomatisierung<br />
<strong>Berlin</strong> GmbH. Vor<br />
sechs Vertretern von BERNMOBIL<br />
wurde im Testzentrum die Funk -<br />
tionstüchtigkeit des BMS demonstriert.<br />
Da die Schnittstellen zu anderen<br />
technischen Systemen wie z.<br />
B. zu SAP und zur Fahrzeugortung<br />
in einer Laborumgebung nicht zur<br />
Verfügung stehen, wurden diese<br />
mittels selbstentwickelter Software<br />
simuliert. Diese Software dient<br />
gleichzeitig als Werkzeug, um das<br />
BMS auf Herz und Nieren zu tes -<br />
ten. Die Depots von BERNMOBIL<br />
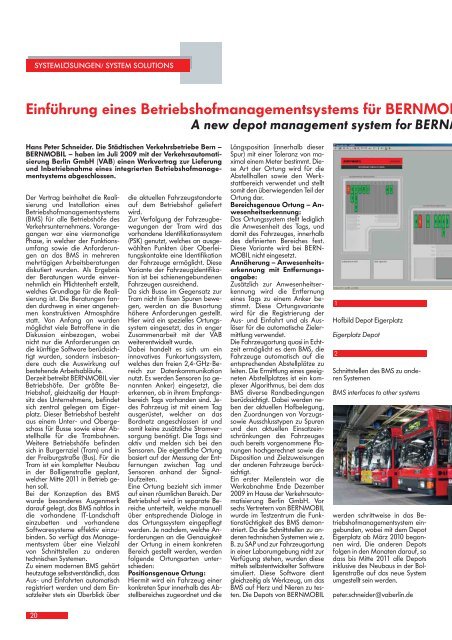
1<br />
Hofbild Depot Eigerplatz<br />
Eigerplatz Depot<br />
2<br />
Schnittstellen des BMS zu anderen<br />
Systemen<br />
BMS interfaces to other systems<br />
werden schrittweise in das Betriebshofmanagementsystemeingebunden,<br />
wobei mit dem Depot<br />
Eigerplatz ab März 2010 begonnen<br />
wird. Die anderen Depots<br />
folgen in den Monaten darauf, so<br />
dass bis Mitte 2011 alle Depots<br />
inklusive des Neubaus in der Bolligenstraße<br />
auf das neue System<br />
umgestellt sein werden.<br />
peter.schneider@vaberlin.de
IL OBIL (Switzerland)<br />
Hans Peter Schneider. In July 2009, Bern's transport authority<br />
BERNMOBIL commissioned Verkehrsautomatisierung <strong>Berlin</strong><br />
GmbH (<strong>VAB</strong>) to supply and commission an integrated depot management<br />
system.<br />
The contract covers realisation<br />
and installation of a depot mana -<br />
gement system (BMS) for all the<br />
depots operated by the transport<br />
authority. It was signed after a<br />
four-month phase, in which func -<br />
tion scope and requirements were<br />
discussed in several day-long<br />
workshops in a pleasant, con -<br />
structive atmosphere with as<br />
many “involved” persons as<br />
possible, looking at the impact on<br />
work sequences as well as the<br />
software requirements. At the<br />
end of the workshops, specifi -<br />
cations were compiled which<br />
formed the basis for realisation.<br />
BERNMOBIL currently operates<br />
4 depots. The largest depot and<br />
headquarters of the company<br />
are in a central location on<br />
Eigerplatz, with two floors for<br />
buses and a hall for trams. There<br />
is also a tram depot in Burgernziel<br />
and a bus depot in Freiburg -<br />
strasse. A new tram depot is to be<br />
constructed in Bolligenstraße,<br />
which should be commissioned<br />
mid 2011.<br />
When designing the depot mana -<br />
gement system, special attention<br />
was paid to embedding the sys -<br />
tem smoothly into the existing IT<br />
landscape and efficiently inte -<br />
grating existing software systems.<br />
1 2<br />
The management system has a<br />
number of interfaces to other<br />
technical systems<br />
Today, depot management sys -<br />
tems must automatically register<br />
entering and exiting vehicles and<br />
provide dispatch managers with<br />
an overview of vehicle locations<br />
on the depot.<br />
To track tram vehicle movements,<br />
the existing identification system<br />
(PSK) is used, which facilitates<br />
vehicle identification at selected<br />
points via overhead line contacts.<br />
This type of vehicle identification<br />
is sufficient for rail-based vehicles.<br />
As buses do not move on fixed<br />
tracks, bus locating is more de -<br />
manding. Here, a special locating<br />
system which was devel -<br />
oped in close co-operation with<br />
<strong>VAB</strong> is deployed.<br />
This is an innovative RFID locating<br />
system which uses the free 2.4-<br />
GHz range for data communi -<br />
cation. Sensors (called armatures)<br />
are deployed which recognise the<br />
presence of tags in their reception<br />
range. Each vehicle is equipped<br />
with a tag which is connected to<br />
the vehicle power supply and thus<br />
does not require any additional<br />
power source. The tags are active<br />
and emit pulses to the sensors.<br />
Locating is based on measure -<br />
ment of the distances between tag<br />
and sensors via the signal pro -<br />
pagation times.<br />
Locating always refers to an area.<br />
The depot is divided into separate<br />
segments, which are entered<br />
manually into the locating system<br />
in corresponding dialogues. De -<br />
pending on precision require -<br />
ments when locating in a specific<br />
segment, the following types of<br />
locating are possible:<br />
Precise-position locating:<br />
With this variant, vehicles are<br />
allocated to a specific track within<br />
the siding area and the longitudinal<br />
position (within this track)<br />
is determined with a tolerance of<br />
max. 1 m. This type is the most<br />
common type of locating and is<br />
used for halls and workshops.<br />
Precise segment locating –<br />
presence recognition:<br />
This locating system merely<br />
establishes the presence of tags<br />
and thus of vehicles within defined<br />
segments. This variant is not<br />
used at BERNMOBIL.<br />
Approach - presence recogni -<br />
tion with distance information:<br />
In addition to presence recogni -<br />
tion, the distance of a tag to an<br />
armature is determined. This<br />
locating variant is used to register<br />
entrance and exit and as a<br />
trigger for automatic destination<br />
determination.<br />
Vehicle locating in quasi real time<br />
allows BMS to guide vehicles<br />
automatically to corresponding<br />
sidings. Determination of a suit -<br />
able parking siding is a complex<br />
algorithm, performed by BMS<br />
taking different factors into<br />
consideration including depot<br />
occupation, track preferences<br />
and exclusions, vehicle-deploy -<br />
ment restrictions, plans for the<br />
particular vehicle, and the<br />
scheduling and destination allo -<br />
cations of other vehicles.<br />
One important milestone was<br />
the FAT at the end of December<br />
2009 at <strong>VAB</strong>. The functional effi -<br />
ciency of the BMS was demon -<br />
strated in the test centre in the<br />
presence of 6 representatives of<br />
BERNMOBIL. As the interfaces to<br />
other technical systems such as<br />
SAP and to vehicle locating are<br />
not available in a ”laboratory<br />
environment”, these were simulat -<br />
ed by software developed inhouse<br />
for the purpose. This soft -<br />
ware can also be used to test the<br />
BMS.<br />
BERNMOBIL depots are being<br />
gradually integrated into the<br />
depot management system, beginning<br />
with Eigerplatz Depot<br />
from March 2010. By mid 2011 all<br />
depots including the new one in<br />
Bolligenstraße should be con -<br />
verted to the new system.<br />
peter.schneider@vaberlin.de<br />
21