

Einführung in die elektrische Antriebstechnik
Einführung in die elektrische Antriebstechnik
Einführung in die elektrische Antriebstechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
ANTEIN, J.Best, WS2000/01 Seite 1<br />
<strong>E<strong>in</strong>führung</strong> <strong>in</strong> <strong>die</strong> <strong>elektrische</strong> <strong>Antriebstechnik</strong><br />
1 Elektrische Antriebssysteme<br />
Elektrische Antriebe begegnen uns heute <strong>in</strong> vielfältiger Form. Kle<strong>in</strong>ste Leistungen im Mikrowatt-Bereich<br />
(Armbanduhr) bis h<strong>in</strong> zum Megawatt-Bereich (Lokomotive, Walzwerk) s<strong>in</strong>d<br />
nicht ungewöhnlich. Auch <strong>die</strong> „Qualität“ der Antriebsaufgabe umfasst e<strong>in</strong>en großen Bereich<br />
vom e<strong>in</strong>fachen Spielzeugantrieb bis zur anspruchsvollen Lageregelung <strong>in</strong> der Werkzeugmasch<strong>in</strong>e.<br />
Von <strong>die</strong>ser breiten Palette von Anwendungen behandeln wir schwerpunktmäßig den Bereich<br />
der „<strong>in</strong>dustriellen“ <strong>Antriebstechnik</strong>.<br />
Wir betrachten e<strong>in</strong> typisches <strong>elektrische</strong>s Antriebssystem:<br />
Netz<br />
ON/OFF<br />
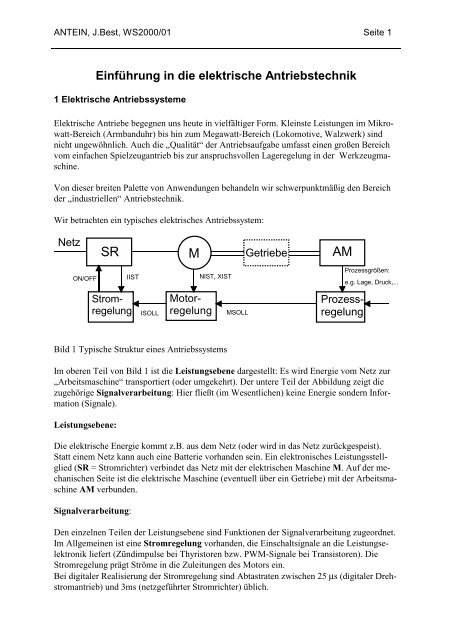
Bild 1 Typische Struktur e<strong>in</strong>es Antriebssystems<br />
Im oberen Teil von Bild 1 ist <strong>die</strong> Leistungsebene dargestellt: Es wird Energie vom Netz zur<br />
„Arbeitsmasch<strong>in</strong>e“ transportiert (oder umgekehrt). Der untere Teil der Abbildung zeigt <strong>die</strong><br />
zugehörige Signalverarbeitung: Hier fließt (im Wesentlichen) ke<strong>in</strong>e Energie sondern Information<br />
(Signale).<br />
Leistungsebene:<br />
Die <strong>elektrische</strong> Energie kommt z.B. aus dem Netz (oder wird <strong>in</strong> das Netz zurückgespeist).<br />
Statt e<strong>in</strong>em Netz kann auch e<strong>in</strong>e Batterie vorhanden se<strong>in</strong>. E<strong>in</strong> elektronisches Leistungsstellglied<br />
(SR = Stromrichter) verb<strong>in</strong>det das Netz mit der <strong>elektrische</strong>n Masch<strong>in</strong>e M. Auf der mechanischen<br />
Seite ist <strong>die</strong> <strong>elektrische</strong> Masch<strong>in</strong>e (eventuell über e<strong>in</strong> Getriebe) mit der Arbeitsmasch<strong>in</strong>e<br />
AM verbunden.<br />
Signalverarbeitung:<br />
SR M Getriebe AM<br />
IIST<br />
Stromregelung<br />
ISOLL<br />
Motorregelung<br />
NIST, XIST<br />
MSOLL<br />
Prozessregelung<br />
Prozessgrößen:<br />
e.g. Lage, Druck,...<br />
Den e<strong>in</strong>zelnen Teilen der Leistungsebene s<strong>in</strong>d Funktionen der Signalverarbeitung zugeordnet.<br />
Im Allgeme<strong>in</strong>en ist e<strong>in</strong>e Stromregelung vorhanden, <strong>die</strong> E<strong>in</strong>schaltsignale an <strong>die</strong> Leistungselektronik<br />
liefert (Zündimpulse bei Thyristoren bzw. PWM-Signale bei Transistoren). Die<br />
Stromregelung prägt Ströme <strong>in</strong> <strong>die</strong> Zuleitungen des Motors e<strong>in</strong>.<br />
Bei digitaler Realisierung der Stromregelung s<strong>in</strong>d Abtastraten zwischen 25 µs (digitaler Drehstromantrieb)<br />
und 3ms (netzgeführter Stromrichter) üblich.
ANTEIN, J.Best, WS2000/01 Seite 2<br />
Die Motorregelung liefert den/<strong>die</strong> Stromsollwert(e) an <strong>die</strong> Stromregelung, damit <strong>die</strong> <strong>elektrische</strong><br />
Masch<strong>in</strong>e e<strong>in</strong> bestimmtes Moment erzeugt. Oft werden dazu mechanische Größen erfasst<br />
(Drehzahl, Lage). Diese mechanischen Größen stehen natürlich auch der übergeordneten Prozessregelung<br />
zur Verfügung (<strong>in</strong> Bild 1 nicht dargestellt).<br />
Bei digitaler Realisierung der Motorregelung s<strong>in</strong>d Abtastraten zwischen 250 µs und 5 ms üblich.<br />
Die Prozessregelung schließlich ist dafür verantwortlich, dass <strong>die</strong> Regelaufgabe des Antriebs<br />
<strong>in</strong>nerhalb des Prozesses, an dem oft viele Antriebe beteiligt s<strong>in</strong>d, erfüllt wird. Dazu erfasst sie<br />
<strong>die</strong> notwendigen Prozessgrößen und bildet daraus z.B. den Momentensollwert für <strong>die</strong> Motorregelung.<br />
Bei digitaler Realisierung der Prozessregelung s<strong>in</strong>d Abtastraten zwischen 250 µs (anspruchsvolle<br />
Lageregelung) und 5 ms (Drehzahlregelung <strong>in</strong> e<strong>in</strong>em Walzwerk) üblich, für langsame<br />
Prozessgrößen kann <strong>die</strong> Abtastrate noch weit langsamer se<strong>in</strong>.<br />
Die grobe Darstellung der Signalverarbeitung <strong>in</strong> Bild 1 läßt regelungstechnisch das Pr<strong>in</strong>zip<br />
der Kaskadenregelung erahnen: Schnelle Regelkreise (e.g. Stromregelung) s<strong>in</strong>d den übergeordneten<br />
Regelkreisen (e.g. Drehzahlregelung) unterlagert. Das Pr<strong>in</strong>zip der Kaskadenregelung<br />
ist <strong>in</strong> der <strong>Antriebstechnik</strong> weit verbreitet und hat sich allgeme<strong>in</strong> bewährt.<br />
Die Prozessregelung ist meist verteilt ausgeführt, d.h. jedem Antrieb ist e<strong>in</strong> Teil der Prozessregelung<br />
(z.B. <strong>die</strong> Drehzahlregelung) zugeordnet und e<strong>in</strong>e übergeordnete „Leittechnik“ gibt<br />
<strong>die</strong> Sollwerte für <strong>die</strong> e<strong>in</strong>zelnen Antriebe vor. In modernen Anlagen kommuniziert <strong>die</strong> Leittechnik<br />
mit den dezentralen Teilen der Signalverarbeitung digital über e<strong>in</strong>en Feldbus.<br />
Welche Funktionen zentral und welche dezentral erledigt werden hängt vom Automatisierungskonzept<br />
ab. Oft (klassisch) ist der Drehzahlsollwert <strong>die</strong> Schnittstelle zum dezentralen<br />
Teil, bei e<strong>in</strong>igen neuen Konzepten bef<strong>in</strong>det sich aber z.B. e<strong>in</strong>e Lageregelung im Antrieb, so<br />
dass <strong>die</strong> übergeordnete Steuerung Lagesollwerte vorgeben kann.<br />
2 Geregelte und ungeregelte Antriebe<br />
In Bild 1 ist e<strong>in</strong> geregelter Antrieb dargestellt. Die <strong>elektrische</strong> Masch<strong>in</strong>e wird über e<strong>in</strong> Leistungsstellglied<br />
betrieben und e<strong>in</strong>e Regelung sorgt dafür, dass gewünschte Prozessgrößen e<strong>in</strong>gehalten<br />
werden.<br />
E<strong>in</strong>e Vielzahl von Antrieben wird aber ungeregelt betrieben: Das Leistungsstellglied und natürlich<br />
auch <strong>die</strong> Regelung entfällt; der Motor, z. B. e<strong>in</strong>e Asynchronmasch<strong>in</strong>e, wird direkt am<br />
Netz betrieben. E<strong>in</strong> Antrieb kann drehzahlveränderlich und dennoch ungeregelt betrieben<br />
werden. Dies ist z.B. dann der Fall, wenn e<strong>in</strong> Frequenzumrichter zwar e<strong>in</strong>e e<strong>in</strong>stellbare Frequenz<br />
und Spannung liefert, <strong>die</strong> Drehzahl des Antriebs aber nicht erfasst wird. Dann ist das<br />
Kriterium e<strong>in</strong>er Regelung nicht erfüllt.<br />
Auch viele kle<strong>in</strong>e Gleichstrommasch<strong>in</strong>en werden ohne Regelung direkt an e<strong>in</strong>er Batterie betrieben.<br />
Beispiele f<strong>in</strong>den wir u.a. im Kfz (Anlasser, Scheibenwischermotor, Lüftung, Antriebe<br />
für Fensterheber etc.) Auch große Antriebe wurden früher ohne Leistungselektronik betrieben,
ANTEIN, J.Best, WS2000/01 Seite 3<br />
z.B. <strong>in</strong> Lokomotiven und Straßenbahnen mit „Schaltwerk“. Dann s<strong>in</strong>d meist besondere E<strong>in</strong>richtungen<br />
zum „Anlassen“ und zum Stellen notwendig (Vorwiderstände etc.).<br />
Bei größeren Antrieben oder wenn <strong>die</strong> Antriebsaufgabe anspruchsvoll ist, oder auch wenn<br />
nicht immer <strong>die</strong> maximale Antriebsleistung benötigt wird, werden heute meist geregelte oder<br />
drehzahlveränderliche Antriebe verwendet.<br />
Die dazu erforderliche Leistungselektronik und <strong>die</strong> zugehörige Signalverarbeitung ist dazu<br />
meist <strong>in</strong> e<strong>in</strong>em Gerät zusammengefasst. Solche Geräte werden z. B. als „Antriebsregelgerät“<br />
bezeichnet, manchmal nennt man sie auch (je nach Anwendungsgebiet) „Stromrichter“,<br />
„Wechselrichter“ oder „Verstärker“ und me<strong>in</strong>t damit das komplette Gerät und nicht nur den<br />
Leistungsteil.<br />
Die EMV-Produktnorm EN 61800-3 verwendet <strong>die</strong> Begriffe Basic Drive Module (BDM) für<br />
das Antriebsregelgerät, Complete Drive Module (CDM) für das BDM e<strong>in</strong>schließlich<br />
Hilfse<strong>in</strong>richtungen (Drosseln, Schütze, Trafos) und Power Drive System (PDS) für den gesamten<br />
Antrieb e<strong>in</strong>schließlich Motor, Sensoren und Verkabelung.<br />
3 Antriebsregelgeräte<br />
In Bild 2 s<strong>in</strong>d am Beispiel e<strong>in</strong>es Gleichstromantriebs mit netzgeführtem Stromrichter typische<br />
Bestandteile e<strong>in</strong>es solchen Antriebsregelgerätes dargestellt. Der Anker der Gleichstrommasch<strong>in</strong>e<br />
wird über e<strong>in</strong>en 6-pulsigen Umkehrstromrichter <strong>in</strong> Drehstrombrückenschaltung betrieben.<br />
Die dargestellten Kommutierungsdrosseln, das Netzschütz und <strong>die</strong> Sicherungen s<strong>in</strong>d dabei<br />
<strong>in</strong> der Regel nicht Bestandteil des Antriebsregelgerätes. Das Feld wird von e<strong>in</strong>er halbgesteuerten<br />
2-pulsigen Brückenschaltung versorgt. Die eigentliche Signalverarbeitung wird<br />
heute meist von e<strong>in</strong>em oder mehreren Mikrocontrollern ausgeführt.<br />
3.1 Leistungsteil-Interface<br />
Zwischen Signalverarbeitung und Leistungsteil ist e<strong>in</strong> Interface geschaltet, das Messgrößen<br />
aus dem Leistungsteil aufbereitet (z. B. Netzspannung UN, Ankerspannung UA, Ankerstrom<br />
IA, Feldstrom IF etc. und andererseits Zündimpulse an <strong>die</strong> Thyristoren liefert und <strong>die</strong> Schütze<br />
für Ankerstromrichter und Feldstromrichter ansteuert.<br />
Die Signalverarbeitung tauscht mit dem Interface B<strong>in</strong>ärsignale mit 5-Volt-Pegel und „saubere“<br />
Analogsignale aus. Das Interface sorgt gegebenenfalls für Potenzialtrennung und Leistungsverstärkung<br />
(Zündimpulse, Ansteuerung Schütze).<br />
3.2 Netzteil<br />
E<strong>in</strong> Antriebsregelgerät benötigt e<strong>in</strong>e Hilfsenergieversorgung oder Netzteil, das <strong>die</strong> Versorgungsspannungen<br />
für Signalverarbeitung und Interfaces liefert. Meist s<strong>in</strong>d <strong>die</strong>s 5 Volt für <strong>die</strong><br />
Digitaltechnik (Mikrocontroller und se<strong>in</strong>e Peripherie), ±15 Volt für <strong>die</strong> Analogtechnik und 24<br />
Volt für B<strong>in</strong>ärsignale und Zündimpulse. In Bild 2 wird das Netzgerät vom gleichen Netz versorgt<br />
, an dem auch der Leistungsteil hängt, aber <strong>die</strong> Versorgung bleibt auch dann bestehen,<br />
wenn z.B. e<strong>in</strong>e der Sicherungen <strong>in</strong> den Zuleitungen zum Leistungsteil fällt. Das Netzgerät<br />
muss auch vor dem Hauptschütz angeschlossen se<strong>in</strong>, wenn das Antriebsregelgerät selbst se<strong>in</strong>
ANTEIN, J.Best, WS2000/01 Seite 4<br />
L1, L2, L3<br />
L1, L2, L3, N<br />
NETZTEIL<br />
KONVENTIONELLE<br />
SCHNITTSTELLE<br />
FELDSTROMRICHTER<br />
UN, UA,, IA, IF ZÜNDIMPULSE<br />
INTERFACE<br />
Bild 2 Typische Bestandteile e<strong>in</strong>es Antriebsregelgerätes<br />
ANKER-<br />
STROM-<br />
RICHTER<br />
5V-SIGNALE, ANALOGSIGNALE<br />
SIGNALVERARBEITUNG (MIKROCOMPUTER)<br />
FELDBUS-<br />
SCHNITT-<br />
STELLE<br />
LOKALE<br />
BEDIENUNG<br />
TACHO<br />
PC-<br />
SCHNITT-<br />
STELLE
ANTEIN, J.Best, WS2000/01 Seite 5<br />
Hauptschütz be<strong>die</strong>nen soll. Auf jeden Fall ist es wünschenswert, wenn <strong>die</strong> Hilfsenergieversorgung<br />
auch dann aufrecht erhalten bleibt, wenn der Antrieb <strong>in</strong>folge e<strong>in</strong>er Störung abschaltet.<br />
Nur so kann <strong>die</strong> Kommunikation mit dem Leitsystem aufrecht erhalten bleiben.<br />
Es gibt auch Konzepte das Netzteil nicht, wie <strong>in</strong> Bild 2 mit 230V Wechselspannung zu versorgen,<br />
sondern mit 24V Gleichspannung. Dies ist zum Teil bei den Antriebsregelgeräten <strong>in</strong><br />
Werkzeugmasch<strong>in</strong>en üblich. Insbesondere, wenn man auch <strong>die</strong> Steuerung mit 24V Gleichspannung<br />
versorgt, ist es so viel leichter möglich, bei Bedarf <strong>die</strong> gesamte Signalverarbeitung<br />
bei Netzspannungsausfall am Leben zu erhalten.<br />
Bei über Wechselrichter betriebenen Drehstromantrieben („Frequenzumrichter“) gibt es meist<br />
e<strong>in</strong>en Gleichspannungszwischenkreis, der außerdem über Kondensatoren gepuffert ist.<br />
Manchmal wird das Netzteil dann über <strong>die</strong>sen Zwischenkreis versorgt. Bei e<strong>in</strong>em Netzspannungsausfall<br />
kann dann wenigstens noch für <strong>die</strong> Zeit, <strong>in</strong> der noch Energie im Zwischenkreis<br />
ist, <strong>die</strong> Hilfsenergieversorgung aufrecht erhalten werden.<br />
Obwohl also das Netzteil im allgeme<strong>in</strong>en e<strong>in</strong> Schattendase<strong>in</strong> führt, ist das richtige Konzept<br />
doch wichtig für das Gesamtsystem.<br />
3.3 Konventionelle Schnittstelle<br />
Auf der „Anwenderseite“ hat das Antriebsregelgerät meist e<strong>in</strong>e konventionelle Schnittstelle<br />
(B<strong>in</strong>är I/O, meist <strong>in</strong> 24V-Technik, analoge Sollwerte<strong>in</strong>gänge, eventuell auch Analogausgänge).<br />
Bei e<strong>in</strong>er typischen konventionellen Schnittstelle bekommt der Antrieb e<strong>in</strong>en analogen<br />
Drehzahlsollwert (meist ±10V) und e<strong>in</strong>ige b<strong>in</strong>äre Signale wie z.B. „EIN/AUS“,<br />
„START/STOPP“ etc. Der Antrieb liefert b<strong>in</strong>äre Status<strong>in</strong>formation z.B. „BEREIT“, „STÖ-<br />
RUNG“ etc. an <strong>die</strong> Steuerung.<br />
Darüberh<strong>in</strong>aus wird <strong>die</strong> konventionelle Schnittstelle auch zur E<strong>in</strong>/Ausgabe von Prozesssignalen<br />
benötigt. Beispiele s<strong>in</strong>d e<strong>in</strong> B<strong>in</strong>ärausgang zum Ansteuern e<strong>in</strong>er mechanischen Bremse,<br />
B<strong>in</strong>äre<strong>in</strong>gänge zum Abfragen von Endschaltern, (eventuell spezielle) Analoge<strong>in</strong>gänge zum<br />
Erfassen von Temperaturen etc.<br />
3.4 Feldbusschnittstelle<br />
Moderne Antriebsregelgeräte s<strong>in</strong>d (meist optionell) mit e<strong>in</strong>er Feldbusschnittstelle ausgestattet.<br />
Dann bekommt das Antriebsregelgerät se<strong>in</strong>e Sollwerte und Steuerbefehle (E<strong>in</strong>/Aus etc.)<br />
über serielle Telegramme vom übergeordneten Leitsystem (Steuerung) und liefert umgekehrt<br />
auch auf <strong>die</strong>sem Wege Istwerte und Status<strong>in</strong>formation an das Leitsystem zurück. Eventuell<br />
können über <strong>die</strong> Feldbusschnittstelle <strong>die</strong> Antriebsregelgeräte auch untere<strong>in</strong>ander Information<br />
austauschen. Ob <strong>die</strong>s möglich ist, hängt von der Art des Feldbussystems ab. Die Feldbusschnittstelle<br />
macht <strong>die</strong> konventionelle Schnittstelle, soweit sie nicht für Prozesssignale benötigt<br />
wird, überflüssig. Sie spart nicht nur Verkabelungsaufwand, sondern ermöglicht z.B. auch<br />
noch nachträgliche Änderungen im Signalaustausch, ohne dass <strong>die</strong> Verkabelung geändert<br />
werden muss. Ohne Mehraufwand kann zusätzliche Information übertragen werden. So ist<br />
meist e<strong>in</strong> Verstellen von Parametern möglich und es kann detaillierte Diagnose<strong>in</strong>formation an<br />
<strong>die</strong> Leitebene geliefert werden. Schließlich können Soll- und Istwerte mit höherer Auflösung<br />
übertragen werden, als <strong>die</strong>s über <strong>die</strong> konventionelle Schnittstelle praktikabel wäre.
ANTEIN, J.Best, WS2000/01 Seite 6<br />
Es gibt firmenspezifische Feldbusse, über <strong>die</strong> allerd<strong>in</strong>gs nur Geräte e<strong>in</strong>es Herstellers (Steuerungen<br />
und Antriebe) kommunizieren können. Solche Systeme f<strong>in</strong>det man vorwiegend im<br />
Anlagenbereich. Große Hersteller, <strong>die</strong> z.B. ganze Walzwerke elektrisch ausrüsten, haben<br />
meist solche Systeme entwickelt. In <strong>die</strong>se Systeme ist das „Know-how“ von vielen Anwendungen<br />
e<strong>in</strong>geflossen, so dass <strong>die</strong> Anforderungen optimal erfüllt werden. Bei solchen großen<br />
Anwendungen ist heute <strong>die</strong> digitale Signalübertragung zwischen Steuerungen und Antrieben<br />
über Feldbusse bereits weit verbreitet.<br />
Daneben gew<strong>in</strong>nen offene Feldbusse immer mehr an Bedeutung. „Offen“ bedeutet hier, dass<br />
Komponenten verschiedener Hersteller zusammengeschaltet werden können. Manche <strong>die</strong>ser<br />
offenen Systeme s<strong>in</strong>d ursprünglich als firmenspezifische Lösungen entstanden, andere wurden<br />
von vornhere<strong>in</strong> als offene Feldbusse spezifiziert und dann meist auch genormt. Die meisten<br />
offenen Feldbusse wurden nicht speziell für <strong>die</strong> <strong>Antriebstechnik</strong> entwickelt, da aber <strong>die</strong> <strong>elektrische</strong><br />
<strong>Antriebstechnik</strong> <strong>in</strong> der Prozessautomatisierung e<strong>in</strong>e wichtige Rolle spielt, wurden deren<br />
Bedürfnisse mehr oder weniger berücksichtigt. Beispiele für Feldbusse s<strong>in</strong>d (alphabetisch,<br />
ohne Bewertung und ohne Anspruch auf Vollständigkeit):<br />
- CAN<br />
CANopen<br />
DeviceNet (Allen Bradley)<br />
SDS (Smart Distributed Systems, Honeywell)<br />
- Interbus-S<br />
- Modbus<br />
- Profibus<br />
- Sercos Interface<br />
Welcher Feldbus zum E<strong>in</strong>satz kommt, hängt nicht nur von se<strong>in</strong>en jeweiligen technischen<br />
Eigenschaften ab, sondern von der Verfügbarkeit von Komponenten für e<strong>in</strong><br />
bestimmtes System. Oft wird der Kunde e<strong>in</strong>en bestimmten Feldbus vorschreiben, so<br />
dass Antriebshersteller meist gezwungen s<strong>in</strong>d, mehrere verschiedene Feldbusse zu<br />
unterstützen.<br />
3.5 Signalverarbeitung<br />
In Bild 2 ist unterstellt, dass <strong>die</strong> Signalverarbeitung mit e<strong>in</strong>em Mikrocontroller erfolgt. Dies<br />
muss nicht immer so se<strong>in</strong>; Antriebsregelgeräte gab es auch schon vor der Erf<strong>in</strong>dung des Mikroprozessors<br />
und es gibt auch heute noch Antriebe, <strong>die</strong> ausschließlich mit analoger Signalverarbeitung<br />
auskommen. Auch s<strong>in</strong>d Antriebsregelgeräte mit re<strong>in</strong> analoger Signalverarbeitung<br />
<strong>in</strong> ihren Regeleigenschaften ke<strong>in</strong>eswegs schlechter als Digitalgeräte. Viele netzgeführte<br />
Stromrichter mit digitaler Signalverarbeitung führen <strong>die</strong> Stromregelung im Takt der Zündimpulse,<br />
bei e<strong>in</strong>em 50Hz-Netz also im Mittel nur alle 3,3ms aus. Bei analoger Signalverarbeitung<br />
wird der Stromregler im Pr<strong>in</strong>zip beliebig schnell bearbeitet, wobei allerd<strong>in</strong>gs auch hier<br />
durch <strong>die</strong> abtastende Arbeitsweise des Stellgliedes (netzgeführter Stromrichter) der Nutzen<br />
<strong>die</strong>ser beliebig schnellen Bearbeitung beschränkt bleibt. Trotzdem kostet es schon e<strong>in</strong>ige Mühe<br />
hier bei digitaler Signalverarbeitung etwa <strong>die</strong> Regelqualität e<strong>in</strong>es guten Analoggerätes zu<br />
erreichen.<br />
Der Nutzen der Digitaltechnik für <strong>die</strong> Regelungstechnik zeigt sich dann, wenn komplexe Regelalgorithmen<br />
zu erledigen s<strong>in</strong>d, wie <strong>die</strong>s z.B. bei der feldorientierten Regelung der Asynchronmasch<strong>in</strong>e<br />
der Fall ist.
ANTEIN, J.Best, WS2000/01 Seite 7<br />
Digitale Signalverarbeitung unterscheidet sich von analoger Signalverarbeitung aber vor allem<br />
<strong>in</strong> der Handhabung. Bei analoger Signalverarbeitung erfolgt <strong>die</strong> Inbetriebnahme (Anpassung<br />
an Motor und Arbeitsmasch<strong>in</strong>e) z.B. durch E<strong>in</strong>stellen von Potentiometern und E<strong>in</strong>löten von<br />
Widerständen und Kondensatoren, deren Werte zuvor typischerweise mit Hilfe von „Inbetriebnahme-Kästchen“,<br />
Widerstandsdekaden etc. ermittelt wurden. Dies kl<strong>in</strong>gt zunächst<br />
schlimmer als es ist: Man muss auch bedenken, dass es viele Serienanwendungen gibt, bei<br />
denen <strong>die</strong> Ermittlung <strong>die</strong>ser Werte nur e<strong>in</strong>mal bei der Erst<strong>in</strong>betriebnahme erfolgen muss, für<br />
alle weiteren Anwendungen müssen <strong>die</strong>se Werte nur übernommen werden. Dabei ist es vorteilhaft,<br />
wenn alle Potentiometer und anzupassenden Bauelemente auf e<strong>in</strong>er eigenen, möglichst<br />
steckbaren Leiterplatte, e<strong>in</strong>em sogenannten „Motorpr<strong>in</strong>t“ untergebracht s<strong>in</strong>d. Dies löst<br />
übrigens auch das wichtige Serviceproblem: Geht e<strong>in</strong> Antriebsregelgerät defekt und muss<br />
ausgetauscht werden, so braucht man nur das Motorpr<strong>in</strong>t und damit alle E<strong>in</strong>stellungen des<br />
defekten Gerätes <strong>in</strong> das neue Gerät zu übernehmen.<br />
Bei e<strong>in</strong>em Digitalgerät werden <strong>die</strong> E<strong>in</strong>stellungen (Parameter) <strong>in</strong> e<strong>in</strong>em nichtflüchtigen Speicher<br />
abgelegt. Dies kann e<strong>in</strong> EEPROM, e<strong>in</strong> FLASH-PROM oder (seltener) e<strong>in</strong> batteriegepuffertes<br />
RAM se<strong>in</strong>. Dazu muss der Anwender oder Inbetriebnehmer e<strong>in</strong>e Möglichkeit haben,<br />
<strong>die</strong>sen Parameterspeicher zu beschreiben. Dies kann über e<strong>in</strong>e lokale Be<strong>die</strong>nung erfolgen, <strong>die</strong><br />
typischerweise aus e<strong>in</strong>er LED- oder LCD-Anzeige und e<strong>in</strong>igen wenigen Tasten besteht. Diese<br />
lokale Be<strong>die</strong>nung kann fest <strong>in</strong> das Gerät e<strong>in</strong>gebaut se<strong>in</strong> oder als separate (weglassbare) E<strong>in</strong>heit<br />
zur Verfügung stehen. E<strong>in</strong>e Alternative besteht dar<strong>in</strong>, den Antrieb mit e<strong>in</strong>er geeigneten<br />
Schnittstelle zu versehen (z.B. RS232), über <strong>die</strong> e<strong>in</strong> Personalcomputer (PC), vorzugsweise e<strong>in</strong><br />
Laptop, angeschlossen werden kann. Hiermit ist nicht nur e<strong>in</strong>e komfortablere Be<strong>die</strong>nung über<br />
e<strong>in</strong> geeignetes Inbetriebnahme- und Diagnoseprogramm möglich; nach erfolgter Inbetriebnahme<br />
können <strong>die</strong> Parameter auf Datenträger (e.g. Diskette) gesichert werden und bei Bedarf<br />
<strong>in</strong> weitere Antriebe geladen werden. Dem bereits beim Analogantrieb angesprochenen Serviceproblem<br />
muss beim Digitalantrieb noch viel größere Beachtung geschenkt werden: Geht<br />
e<strong>in</strong> Digitalgerät defekt und es wurde versäumt, <strong>die</strong> e<strong>in</strong>gestellten Parameter <strong>in</strong> irgende<strong>in</strong>er<br />
Form zu sichern (auf Datenträger oder Papier, notfalls durch Aufschreiben), so ist e<strong>in</strong> Gerätetausch<br />
problematisch. Dies gilt um so mehr, als e<strong>in</strong> Digitalgerät meist sehr viele Parameter<br />
(z.B. 100) hat.<br />
E<strong>in</strong> Digitalantrieb kann über <strong>die</strong> Möglichkeit e<strong>in</strong>er Anwenderprogrammierung verfügen.<br />
Die Firmware (so nennt man <strong>die</strong> im Antrieb „fest“ abgelegte Software) verfügt dann über<br />
sogenannte Funktionsblöcke. Das s<strong>in</strong>d Programmteile, <strong>die</strong> bestimmte Funktionen erfüllen,<br />
von e<strong>in</strong>fachen logischen Verknüpfungen bis h<strong>in</strong> zu Reglern oder noch komplexeren Bauste<strong>in</strong>en.<br />
Diese Funktionsblöcke können vom Anwender aktiviert werden und <strong>die</strong> E<strong>in</strong>- und Ausgänge<br />
der Funktionsblöcke können vom Anwender zu komplexen Applikationen verbunden<br />
werden. Liegt e<strong>in</strong>e solche Anwenderprogrammierung vor, so gelten für den Servicefall ähnliche<br />
Überlegungen, wie für <strong>die</strong> Parameter: Es muss dafür gesorgt werden, dass bei e<strong>in</strong>em notwendigen<br />
Gerätetausch das Anwenderprogramm für den neuen Antrieb zur Verfügung steht.<br />
Schließlich ist es bei e<strong>in</strong>em Digitalgerät möglich, dass verschiedene Firmwareversionen vorliegen.<br />
Dies ist, verglichen mit dem Analoggerät, wie e<strong>in</strong>e andere Hardware zu betrachten:<br />
Bei e<strong>in</strong>em Gerätetausch muss dafür gesorgt werden, dass das Ersatzgerät über <strong>die</strong> gleiche oder<br />
e<strong>in</strong>e aufwärtskompatible Firmware verfügt. Die Firmware ist meist <strong>in</strong> e<strong>in</strong>em (oder mehreren)<br />
EPROM oder FLASH-PROM abgelegt. Im Falle des FLASH-PROMs kann es möglich se<strong>in</strong>,<br />
über <strong>die</strong> PC-Schnittstelle e<strong>in</strong>e andere Firmware zu laden.
ANTEIN, J.Best, WS2000/01 Seite 8<br />
Die soeben diskutierte Problematik, wie sie im Servicefall bei e<strong>in</strong>em Digitalgerät entstehen<br />
kann, wird manchmal so gelöst, dass man den Parameterspeicher und eventuell auch den<br />
Firmwarespeicher <strong>in</strong> e<strong>in</strong> steckbares Speichermodul, vergleichbar dem „Motorpr<strong>in</strong>t“ beim<br />
Analogantrieb, e<strong>in</strong>baut. In der Regel ist dann e<strong>in</strong> Gerätetausch unproblematisch. Allerd<strong>in</strong>gs<br />
muss man auch mit dem Fall rechnen, dass das Speichermodul selbst defekt geht oder <strong>die</strong><br />
Speicher ungewollt beschrieben werden. Für <strong>die</strong>sen Fall ist es trotzdem notwendig, dass zusätzlich<br />
auf andere Art E<strong>in</strong>stellparameter und gegebenenfalls Anwenderprogramme gesichert<br />
wurden.<br />
E<strong>in</strong> wichtiger Vorteil digitaler Signalverarbeitung besteht <strong>in</strong> den Möglichkeiten, <strong>die</strong> e<strong>in</strong>gebaute<br />
„Intelligenz“ des Rechners zu nutzen. So ist es üblich, dass Digitalgeräte über Prozeduren<br />
zur Ermittlung der Regelparameter verfügen („Selbste<strong>in</strong>stellung“).<br />
Mit dem Mikrocomputer können auch leicht Hilfsmittel zur Diagnose implementiert<br />
werden. E<strong>in</strong> Beispiel dafür ist e<strong>in</strong> <strong>in</strong> Software realisierter Transientenrecorder, der<br />
beim E<strong>in</strong>treffen von wählbaren Triggerbed<strong>in</strong>gungen <strong>in</strong>terne Werte im RAM ablegt.<br />
Der Zeitverlauf <strong>die</strong>ser Größen kann dann mit dem angeschlossenen Inbetriebnahme-<br />
PC angesehen werden. Ist <strong>die</strong> serielle Kommunikation zwischen Antrieb und Inbetriebnahme-PC<br />
schnell genug, so ist es sogar möglich, den Zeitverlauf „onl<strong>in</strong>e“ am<br />
PC darzustellen. In vielen Fällen wird man dann bei Inbetriebnahme und Fehlersuche<br />
auf Hilfsmittel wie herkömmliche Messgeräte und Oszilloskope verzichten können.<br />
4 Getriebe<br />
In Bild 1 ist zwischen Motor und Arbeitsmasch<strong>in</strong>e e<strong>in</strong> Getriebe geschaltet. Es soll nun diskutiert<br />
werden wann und wozu <strong>die</strong>s notwendig ist. In Bild 3 ist <strong>die</strong>ses Detail noch e<strong>in</strong>mal dargestellt:<br />
M<br />
ω1 Getriebe<br />
ω2 AM<br />
M1 η<br />
M2 Bild 3 Getriebe zwischen Motor und Arbeitsmasch<strong>in</strong>e<br />
Das Getriebe hat hier <strong>die</strong> Aufgabe, <strong>die</strong> Drehzahl n1 (bzw. <strong>die</strong> W<strong>in</strong>kelgeschw<strong>in</strong>digkeit ω1 ) des<br />
Motors <strong>in</strong> <strong>die</strong> Drehzahl n2 (bzw. <strong>die</strong> W<strong>in</strong>kelgeschw<strong>in</strong>digkeit ω2 ) umzusetzen. Zwischen<br />
Drehzahl n und W<strong>in</strong>kelgeschw<strong>in</strong>digkeit ω besteht folgender Zusammenhang:<br />
ω = 2 π n (4.1)
ANTEIN, J.Best, WS2000/01 Seite 9<br />
Die W<strong>in</strong>kelgeschw<strong>in</strong>digkeit ist <strong>die</strong> Geschw<strong>in</strong>digkeit e<strong>in</strong>es Punktes auf dem E<strong>in</strong>heitskreis<br />
(Kreis mit Radius r = 1). Im täglichen Leben (auch des Ingenieurs) gibt man üblicherweise<br />
<strong>die</strong> Drehzahl an. Man sagt „e<strong>in</strong> Motor hat <strong>die</strong> Drehzahl 1000 U/m<strong>in</strong> oder 1000 m<strong>in</strong> -1 oder<br />
1000 rpm“ (rpm ist <strong>die</strong> englische Abkürzung für revolutions per m<strong>in</strong>ute). Kaum jemand sagt<br />
„<strong>die</strong> W<strong>in</strong>kelgeschw<strong>in</strong>digkeit des Motors beträgt 104,7 s -1 “, was etwa das Gleiche wäre.<br />
Trotzdem ist es im Zweifelsfall empfehlenswert, mit der W<strong>in</strong>kelgeschw<strong>in</strong>digkeit anstatt der<br />
Drehzahl zu rechnen.<br />
Diese stellt <strong>die</strong> physikalischen Gegebenheiten besser dar. Warum <strong>die</strong>s so ist, wollen wir uns<br />
klarmachen.<br />
Aus der Physik wissen wir, dass <strong>die</strong> Arbeit das Produkt aus Kraft und Weg ist:<br />
W = F s (4.2)<br />
In (4.2) ist W (Work) <strong>die</strong> Arbeit, F (Force) <strong>die</strong> Kraft und s der Weg. Die Beziehung (4.2) gilt<br />
<strong>in</strong> <strong>die</strong>ser e<strong>in</strong>fachen Form nur dann, wenn <strong>die</strong> Kraft F <strong>die</strong> gleiche Richtung wie der Weg s hat,<br />
und über den gesamten Weg konstant ist. S<strong>in</strong>d <strong>die</strong>se Bed<strong>in</strong>gungen nicht erfüllt, so gilt:<br />
b<br />
W = ∫ F⋅ds ! !<br />
(4.3)<br />
a<br />
Die Arbeit ist das Weg<strong>in</strong>tegral über das skalare Vektorprodukt aus Kraft und Wegelement.<br />
Für unsere e<strong>in</strong>fachen Überlegungen genügt aber <strong>die</strong> Beziehung (4.2).<br />
Die Leistung P (Power) ist bekanntlich <strong>die</strong> zeitliche Ableitung der Arbeit:<br />
dW<br />
P = =<br />
dt<br />
F⋅ds dt<br />
= F⋅ v<br />
(4.4)<br />
Die (mechanische) Leistung ist also gleich dem Produkt aus Kraft und Geschw<strong>in</strong>digkeit, wobei<br />
auch hier wieder gilt, dass Kraft F und Geschw<strong>in</strong>digkeit v (velocity) gleiche Richtung haben<br />
müssen.<br />
ω<br />
Bild 4 Umsetzung <strong>in</strong> e<strong>in</strong>e Drehbewegung<br />
r<br />
v<br />
F
ANTEIN, J.Best, WS2000/01 Seite 10<br />
Bild 4 zeigt <strong>die</strong> Umfangskraft F, <strong>die</strong> an e<strong>in</strong>er Scheibe mit Radius r angreift. Dadurch wirkt<br />
das Moment<br />
M = r F (4.5)<br />
auf <strong>die</strong> Scheibe. Andererseits bewegt sich e<strong>in</strong> Punkt auf dem Umfang der Scheibe mit dem rfachen<br />
der W<strong>in</strong>kelgeschw<strong>in</strong>digkeit (e<strong>in</strong> Punkt im Abstand r = 1 bewegt sich genau mit W<strong>in</strong>kelgeschw<strong>in</strong>digkeit):<br />
v = ω r (4.6)<br />
Wir lösen (4.5) nach F auf und setzen <strong>die</strong>s und <strong>die</strong> Beziehung (4.6) <strong>in</strong> (4.4) e<strong>in</strong>:<br />
P Fv M<br />
= = ⋅ rω = Mω<br />
(4.7)<br />
r<br />
Der Radius r kürzt sich weg und wir erhalten für <strong>die</strong> Leistung bei der Drehbewegung e<strong>in</strong>e<br />
Beziehung, <strong>die</strong> formal genauso aussieht, wie bei der L<strong>in</strong>earbewegung, nur steht anstelle der<br />
Kraft das Moment und anstelle der Geschw<strong>in</strong>digkeit <strong>die</strong> W<strong>in</strong>kelgeschw<strong>in</strong>digkeit.<br />
Wollen wir <strong>die</strong> Leistung <strong>in</strong> Abhängigkeit von der Drehzahl ausdrücken, so können wir natürlich<br />
(4.1) <strong>in</strong> (4.7) e<strong>in</strong>setzen:<br />
P = 2 π n M (4.8)<br />
Jetzt taucht der Faktor 2 π auf und wir dürfen außerdem nicht vergessen, dass <strong>die</strong> Drehzahl ja<br />
üblicherweise <strong>in</strong> M<strong>in</strong>uten angegeben wird, weshalb wir beim Ausrechnen sorgfältig auf <strong>die</strong><br />
E<strong>in</strong>heiten achten müssen.<br />
Wir kehren nun zur Betrachtung des Getriebes <strong>in</strong> Bild 3 zurück. Dort ist noch <strong>die</strong> Größe η<br />
e<strong>in</strong>getragen. Darunter versteht man den Wirkungsgrad, der folgendermaßen def<strong>in</strong>iert ist:<br />
η = P<br />
P<br />
ab<br />
zu<br />
Der Wirkungsgrad ist also das Verhältnis von abgegebener zu zugeführter Leistung. Da <strong>die</strong><br />
abgegebene Leistung stets kle<strong>in</strong>er se<strong>in</strong> muss als <strong>die</strong> zugeführte, ist η immer kle<strong>in</strong>er oder<br />
gleich e<strong>in</strong>s.<br />
(4.9)<br />
Wir müssen beachten, dass der Wirkungsgrad ke<strong>in</strong>e Konstante ist, sondern z.B. vom Moment<br />
abhängt: Bei Nennmoment ist der Wirkungsgrad größer als bei Teilbelastung.
ANTEIN, J.Best, WS2000/01 Seite 11<br />
Der Wirkungsgrad ist auch nicht e<strong>in</strong>fach e<strong>in</strong> Faktor zwischen der Leistung P1 auf der Motorseite<br />
und der Leistung P2 auf der Seite der Arbeitsmasch<strong>in</strong>e. Treibt der Motor <strong>die</strong> Arbeitsmasch<strong>in</strong>e<br />
an, so ist P1 > P2 und es gilt η = P2 / P1 . Speist dagegen <strong>die</strong> Arbeitsmasch<strong>in</strong>e Energie<br />
zurück und <strong>die</strong> <strong>elektrische</strong> Masch<strong>in</strong>e arbeitet als Generator, so ist P2 > P1 und es gilt η = P1 /<br />
P2 . Wenn wir also den Wirkungsgrad berücksichtigen müssen, ist es notwendig, <strong>die</strong> Richtung<br />
des Energieflusses zu beachten.<br />
Bei e<strong>in</strong>em verlustfreien Getriebe ( η = 1) gilt:<br />
Daraus folgt:<br />
P = P = ω ⋅ M = ω ⋅ M = 2π ⋅n ⋅ M = 2π<br />
⋅n ⋅ M<br />
(4.10)<br />
1 2 1 1 2 2 1 1 2 2<br />
M<br />
M<br />
1<br />
2<br />
ω<br />
2<br />
= =<br />
ω 1<br />
n<br />
n<br />
2<br />
1<br />
(4.11)<br />
Die Momente an den beiden Getriebeseiten s<strong>in</strong>d also (bei η = 1) umgekehrt proportional zu<br />
den W<strong>in</strong>kelgeschw<strong>in</strong>digkeiten bzw. den Drehzahlen. Dies ist nicht weiter erstaunlich, sondern<br />
nur e<strong>in</strong>e andere Form der Hebelgesetze. E<strong>in</strong>e Drehzahlerhöhung wird mit e<strong>in</strong>er entsprechenden<br />
Verr<strong>in</strong>gerung des Momentes erkauft (und umgekehrt).<br />
Wir wollen nun der Frage nachgehen, warum man überhaupt Getriebe braucht. Kann man<br />
nicht den Motor so bauen, dass er das gewünschte Moment bzw. <strong>die</strong> gewünschte Drehzahl für<br />
<strong>die</strong> Arbeitsmasch<strong>in</strong>e ohne Übersetzung durch e<strong>in</strong> Getriebe direkt liefert (Direktantrieb) ?<br />
Dazu betrachten wir zunächst das Grundpr<strong>in</strong>zip jeder <strong>elektrische</strong>n Masch<strong>in</strong>e, <strong>die</strong> Kraft auf<br />
e<strong>in</strong>en stromdurchflossenen Leiter im Magnetfeld (Bild 5)<br />
i<br />
B<br />
Bild 5 Kraft auf e<strong>in</strong>en stromdurchflossenen Leiter im Magnetfeld<br />
ϕ<br />
s<br />
F
ANTEIN, J.Best, WS2000/01 Seite 12<br />
Es gilt<br />
! ! !<br />
F = i⋅ s × B<br />
(4.12)<br />
Dar<strong>in</strong> gibt der Vektor ! s Richtung und Länge des Leiters an, durch den der Strom i fließt,<br />
während ! B Richtung und Intensität e<strong>in</strong>es homogenen Magnetfeldes bestimmt. Auf den Leiter<br />
wird dann e<strong>in</strong>e Kraft ! F ausgeübt, <strong>die</strong> senkrecht auf der durch ! s und ! B aufgespannten Ebene<br />
steht. Für <strong>die</strong> Richtung gilt dabei <strong>die</strong> Schraubenregel: ! F zeigt <strong>in</strong> <strong>die</strong> Richtung, <strong>in</strong> <strong>die</strong> sich e<strong>in</strong>e<br />
rechtsgängige Schraube dreht, wenn man ! s auf kürzestem Wege <strong>in</strong> <strong>die</strong> Richtung von ! B dreht.<br />
Der Betrag von ! F ist dabei gleich dem Flächen<strong>in</strong>halt des von ! s und ! B aufgespannten Parallelogramms,<br />
also:<br />
F = i⋅s⋅B⋅s<strong>in</strong>ϕ (4.13)<br />
Bild 6 zeigt nun das Pr<strong>in</strong>zip e<strong>in</strong>es Elektromotors:<br />
Bild 6 Pr<strong>in</strong>zip des Elektromotors<br />
Die magnetischen Feldl<strong>in</strong>ien treten radial auf der e<strong>in</strong>en Seite des Rotors e<strong>in</strong> und auf der anderen<br />
Seite wieder aus. Auf der rechten Seite <strong>in</strong> Bild 6 fließt der Strom aus der Zeichnungsebene<br />
heraus, wir schauen auf <strong>die</strong> Spitzen der Zählpfeile, angedeutet durch Punkte <strong>in</strong> den Leitermittelpunkten.<br />
Drehen wir <strong>die</strong>se Pfeile auf kürzestem Weg <strong>in</strong> Richtung des magnetischen Feldes,<br />
so erkennen wir nach der Rechtsschraubenregel, dass <strong>die</strong> resultierenden Kräfte nach „oben“<br />
gerichtet s<strong>in</strong>d; genauer: Sie greifen radial am Rotor so an, dass e<strong>in</strong> Moment entgegen dem<br />
Uhrzeigers<strong>in</strong>n entsteht. Auf der l<strong>in</strong>ken Seite fließen <strong>die</strong> Ströme <strong>in</strong> <strong>die</strong> Zeichnungsebene h<strong>in</strong>e<strong>in</strong>;<br />
wir schauen auf <strong>die</strong> Enden der Zählpfeile, dargestellt durch Kreuze. Drehen wir hier <strong>die</strong><br />
Pfeile auf kürzestem Wege <strong>in</strong> Richtung des Magnetfeldes, so ergeben sich nach der Rechtsschraubenregel<br />
Kräfte, <strong>die</strong> nach unten gerichtet s<strong>in</strong>d bzw. auch hier so am Rotor angreifen,<br />
dass e<strong>in</strong> Moment entgegen dem Uhrzeigers<strong>in</strong>n entsteht.
ANTEIN, J.Best, WS2000/01 Seite 13<br />
Wir wollen nun das Drehmoment des dargestellten Motors berechnen. Auf dem Rotor seien z<br />
Leiter gleichmäßig verteilt; <strong>die</strong> Länge des Rotors und der Leiter sei l . Da Strom und Feld<br />
senkrecht aufe<strong>in</strong>anderstehen, ist <strong>in</strong> Gleichung (4.13) ϕ = 90° und wir erhalten für <strong>die</strong> Kraft auf<br />
e<strong>in</strong>en Leiter der sich im Feld bef<strong>in</strong>det:<br />
FL = ilB<br />
(4.14)<br />
Da, wie aus Bild 6 hervorgeht, sich nicht alle Leiter gleichzeitig im Magnetfeld bef<strong>in</strong>den, wird<br />
zur Berechnung der Summe aller Kräfte der Polbedeckungsfaktor α e<strong>in</strong>geführt. Dies ist e<strong>in</strong>e<br />
Zahl, <strong>die</strong> kle<strong>in</strong>er als e<strong>in</strong>s ist, und <strong>die</strong> <strong>die</strong>sen Sachverhalt berücksichtigt. Für <strong>die</strong> Summe aller<br />
Kräfte, <strong>die</strong> auf <strong>die</strong> z Leiter <strong>in</strong> Bild 6 e<strong>in</strong>wirken, gilt:<br />
F = α ∑ FL<br />
= α zil<br />
B<br />
(4.15)<br />
Hat der Rotor den Radius r, so ergibt sich damit das Moment:<br />
M = rF = rα<br />
zil<br />
B<br />
(4.16)<br />
Wir denken uns nun den Strom i, der durch <strong>die</strong> z diskreten Leiter fließt, durch e<strong>in</strong>en<br />
Strombelag a (Strom pro Länge) ersetzt:<br />
Damit erhält man:<br />
z i<br />
a = (4.17)<br />
2π<br />
r<br />
2<br />
M = 2αr<br />
π laB<br />
(4.18)<br />
Das Volumen des Rotors ist aber:<br />
V = π r l<br />
2<br />
Damit wird aus (4.18):<br />
(4.19)<br />
M = 2α V aB<br />
(4.20)<br />
Dar<strong>in</strong> ist α e<strong>in</strong>e konstruktionsabhängige Konstante (
ANTEIN, J.Best, WS2000/01 Seite 14<br />
belag und <strong>die</strong> magnetische Flussdichte konstruktionsbed<strong>in</strong>gt <strong>in</strong> gewissen Grenzen schwanken<br />
können, d.h. bei der e<strong>in</strong>en Motorkonstruktion etwas größere und bei der anderen etwas kle<strong>in</strong>ere<br />
Werte annehmen, so hängt doch das erreichbare Drehmoment gemäß (4.20) im wesentlichen<br />
vom Volumen ab.<br />
Mit Gl. (4.7) erhalten wir für <strong>die</strong> Leistung:<br />
und für <strong>die</strong> Leistungsdichte:<br />
P = 2αV aBω<br />
(4.21)<br />
PV = 2αaBω (4.22)<br />
Wollen wir also e<strong>in</strong>e hohe Leistungsdichte erzielen, so müssen wir den Motor mit hoher<br />
Drehzahl bzw. W<strong>in</strong>kelgeschw<strong>in</strong>digkeit betreiben, denn <strong>die</strong> anderen Größen <strong>in</strong> (4.22) können<br />
nur <strong>in</strong> engen Grenzen variiert werden.<br />
E<strong>in</strong> Zahlenbeispiel soll e<strong>in</strong> ungefähres Gefühl für <strong>die</strong> Größenordnung der Leistungsdichte<br />
vermitteln:<br />
a = 100 A/cm,B = 1 Vs/m 2 = 1 T, α = 0,5<br />
ω = 2 π 50 /s (3000 Umdrehungen pro M<strong>in</strong>ute)<br />
Daraus ergibt sich:<br />
PV= 2 ⋅0,5⋅100 ⋅ ⋅ s<br />
A Vs<br />
1<br />
cm m 100π<br />
2<br />
π 10 6 W<br />
PV= ⋅ ≅ 3MW m = 3kW dm<br />
3<br />
m<br />
3 3<br />
Wenn also <strong>die</strong> Arbeitsmasch<strong>in</strong>e AM <strong>in</strong> Bild 3 nur niedrige Drehzahlen, verglichen mit den<br />
erlaubten Drehzahlen des Motors, benötigt, so kann es günstig se<strong>in</strong>, e<strong>in</strong> Getriebe e<strong>in</strong>zusetzen,<br />
um mit e<strong>in</strong>em möglichst kle<strong>in</strong>en Motor auszukommen.<br />
Es kann natürlich auch der umgekehrte (triviale) Fall vorliegen, dass <strong>die</strong> Arbeitsmasch<strong>in</strong>e e<strong>in</strong>e<br />
höhere Drehzahl verlangt, als für den Motor zulässig ist; <strong>in</strong>sbesondere bei Gleichstrommasch<strong>in</strong>en<br />
ist <strong>die</strong> maximal zulässige Drehzahl begrenzt. E<strong>in</strong> Beispiel wäre e<strong>in</strong> Prüfstand für<br />
Formel 1 - Rennmotoren, bei dem e<strong>in</strong>e Gleichstrommasch<strong>in</strong>e als Belastung <strong>die</strong>nt. Auch dann<br />
ist e<strong>in</strong> Getriebe erforderlich.<br />
Dennoch wurde und wird oft auf e<strong>in</strong> Getriebe verzichtet und es kommen Direktantriebe zum<br />
E<strong>in</strong>satz, manchmal auch im größeren Leistungsbereich. In technischen Museen kann man<br />
bisweilen kle<strong>in</strong>ere Dampfkraftwerke bewundern, bestehend aus e<strong>in</strong>er Kolbendampfmasch<strong>in</strong>e<br />
und e<strong>in</strong>em Synchrongenerator oder Gleichstromgenerator. Da <strong>die</strong> Dampfmasch<strong>in</strong>e relativ<br />
langsam läuft, s<strong>in</strong>d <strong>die</strong> <strong>elektrische</strong>n Masch<strong>in</strong>en riesig, gemessen an der Leistung. Große, langsam<br />
laufende Gleichstrommasch<strong>in</strong>en werden auch zum Antrieb von M<strong>in</strong>enaufzügen benutzt.
ANTEIN, J.Best, WS2000/01 Seite 15<br />
Langsam laufende Direktantriebe werden bisweilen auch <strong>in</strong> der Servotechnik bei speziellen<br />
Anwendungen benutzt (Torque-Motoren), wo man <strong>die</strong> störenden E<strong>in</strong>flüsse e<strong>in</strong>es Getriebes<br />
vermeiden möchte.<br />
5 Mehrmotorenantriebe<br />
In der Anfangszeit der Industrialisierung wurden oft mehrere Arbeitsmasch<strong>in</strong>en von e<strong>in</strong>em<br />
Motor (z.B. Dampfmasch<strong>in</strong>e) über Transmissionswellen und Riemen angetrieben. Daraus<br />
wurden dann im Laufe der Entwicklung Gruppenantriebe und schließlich E<strong>in</strong>zelantriebe.<br />
Da, wo koord<strong>in</strong>ierte Bewegungen zu vollführen s<strong>in</strong>d, wie <strong>in</strong> der Werkzeugmasch<strong>in</strong>e, erfordert<br />
<strong>die</strong> Auflösung <strong>in</strong> e<strong>in</strong>zelne Antriebe besondere technische Lösungen (numerische Steuerungen).<br />
Auch heute gibt es noch viele Masch<strong>in</strong>en, bei denen <strong>die</strong> Koord<strong>in</strong>ation der verschiedenen Bewegungen<br />
mechanisch erfolgt, z.B. bei der Druckmasch<strong>in</strong>e durch <strong>die</strong> Längswelle (Königswelle)<br />
und entsprechende Getriebe. Hier beg<strong>in</strong>nt sich allmählich moderne <strong>Antriebstechnik</strong><br />
durchzusetzen mit lagegeregelten E<strong>in</strong>zelantrieben.<br />
6 Eigenschaften <strong>elektrische</strong>r Antriebe<br />
Elektrische Antriebe haben e<strong>in</strong>ige besondere Eigenschaften, wodurch sie sich von anderen<br />
Antriebsarten (Verbrennungsmasch<strong>in</strong>en, hydraulische Antriebe, pneumatische Antriebe ) unterscheiden.<br />
Hier s<strong>in</strong>d e<strong>in</strong>ige Stichworte zusammengestellt:<br />
• Energiezufuhr (stationär: e<strong>in</strong>fach, Fahrzeuge: schwierig, Fahrdraht, Batterie, Brennstoffzelle)<br />
• Umweltfreundlich<br />
• Betrieb <strong>in</strong> beliebiger Umgebung (U-Boot, Mond-Auto, Marsmobil)<br />
• Wirkungsgrad gut (Motor z.B. 95% für 90kW ASM, Umrichter 97%)<br />
• Moment bei Drehzahl 0 (im Gegensatz zum Otto- oder Dieselmotor)<br />
• Beide Drehrichtungen möglich (im Gegensatz zum Otto- oder Dieselmotor)<br />
• Beide Momentenrichtungen möglich (Nutzbremsen, aber auch Positionieren, Motion<br />
Control)<br />
• Hohe kurzzeitige Überlastbarkeit (Beschleunigungsantrieb)<br />
• Ruhiger Lauf (weil rotationssymmetrisch)<br />
• Gute Regelbarkeit (Bandanlagen, Automatisierungstechnik)<br />
• Leistung/Gewicht schlechter als bei Hydraulik<br />
7 Auswahlkriterien<br />
Bei der Auswahl e<strong>in</strong>es <strong>elektrische</strong>n Antriebs s<strong>in</strong>d viele Kriterien zu beachten, <strong>in</strong>sbesondere<br />
s<strong>in</strong>d <strong>die</strong> jeweils gültigen Normen und Vorschriften e<strong>in</strong>zuhalten. E<strong>in</strong>ige <strong>die</strong>ser Kriterien s<strong>in</strong>d<br />
hier aufgelistet:<br />
• Geräusche<br />
• Netzrückwirkung<br />
• Betriebsart der Masch<strong>in</strong>e (S1..S10: Dauerbetrieb, Kurzzeitbetrieb,.. siehe Bild 7)
ANTEIN, J.Best, WS2000/01 Seite 16<br />
• Kühlart der Masch<strong>in</strong>e (Selbst 1 -, Eigen 2 -, Fremdkühlung)<br />
• Bauform des Motors (IM B3, IM V5, siehe Bild 8)<br />
• Schutzart für den Motor (IP21, IP65: Berührung-, Fremdkörper-, Wasserschutz; Bild 9)<br />
• Wärmeklasse (Isolierstoff)<br />
• Ex-Schutz<br />
• Schutzart für den Stromrichter (IP 21, ..)<br />
• Belastungsklasse für den Stromrichter (I, ... VI nach EN 60146-1-1:1993; Bild 10)<br />
• EMV-Gesichtspunkte<br />
Bild 7 Betriebsarten <strong>elektrische</strong>r Masch<strong>in</strong>en nach DIN VDE 0530 bzw. IEC 34 [1]<br />
1 nur über Oberfläche<br />
2 Lüfter auf der Welle
ANTEIN, J.Best, WS2000/01 Seite 17<br />
Bild 8 Bauformen <strong>elektrische</strong>r Masch<strong>in</strong>en nach DIN IEC 34 [1]
ANTEIN, J.Best, WS2000/01 Seite 18<br />
Bild 9 Schutzarten <strong>elektrische</strong>r Masch<strong>in</strong>en [1]
ANTEIN, J.Best, WS2000/01 Seite 19<br />
Bild 10 Belastungsklassen von Stromrichtern nach EN 60146 (VDE 0558) [1]
ANTEIN, J.Best, WS2000/01 Seite 20<br />
Literatur<br />
[1] Brosch, Peter F.: Moderne Stromrichterantriebe: Arbeitsweise drehzahlveränderlicher Antriebe<br />
mit Stromrichtern / 3.,überarb. u. erw. Aufl. - Würzburg: Vogel, 1998 (Kamprath-Reihe)<br />
ISBN 3-8023-1735-1<br />
[2] Hofer, Klaus: Regelung <strong>elektrische</strong>r Antriebe: Innovation durch Intelligenz / Berl<strong>in</strong>; Offenbach:<br />
VDE-Verlag, 1998<br />
ISBN 3-8007-2234-8<br />
[3] Leonhard, Werner: Control of Electrical Drives / 2. ed. Berl<strong>in</strong>; Heidelberg; New York:<br />
Spr<strong>in</strong>ger, 1996<br />
ISBN 3-540-59380-2<br />
[4] Milde, Friedhelm: Vorlesung Elektrische Masch<strong>in</strong>en 1/ 3. Auflage - Fachhochschule<br />
Mannheim - Hochschule für Technik und Gestaltung<br />
[5] Nguyen, Phung Quang: Praxis der feldorientierten Drehstromantriebsregelungen / Ehn<strong>in</strong>gen<br />
bei Böbl<strong>in</strong>gen: expert-Verl., 1993<br />
ISBN 3-8169-1047-5














